







写大论文的时候看到了这篇文章,感叹到作者科研的创新
《A Non-Local Cost Aggregation Method for Stereo Matching》
一种非局部代价聚合立体匹配方法
对于基于局部信息的立体匹配,采用的一般都是滑动窗口,作者创造性的提出使用最小生成树并结合其性质完成了全局代价聚合的值传递工作,效果很好,而且有代码实现:
Paper:
http://www.cs.cityu.edu.hk/~qiyang/publications/cvpr-12/cvpr-12-qingxiong-yang.pdf
Code:
http://www.cs.cityu.edu.hk/~qiyang/publications/cvpr-12/code/
介绍文章1:
http://blog.csdn.net/wsj998689aa/article/details/45041547
介绍文章2:
http://www.bubuko.com/infodetail-668886.html
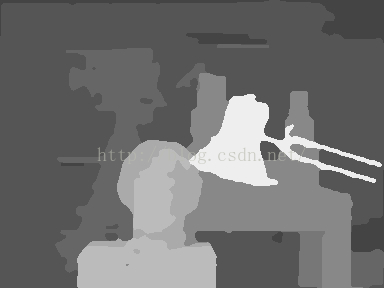
效果还不错:整体上完全达到了全局优化算法的水平,而且算法在时间上基本能够满足实时性的要求,如果通过分析代码性能加以优化,或者引入并行计算的算法,实时计算不是没有可能。后续准备详细分析改良一下这个算法,作为一个创新点好好学习一下。
改进的文章:根据本文开头文章的思想进行了改进
Segment-Tree based Cost Aggregation for Stereo Matching
基本思路是分割后每一块作为一个最小生成树,类似分层的最小生成树,其实就是减少MST中的节点数目。
文章分析:
http://blog.csdn.net/wsj998689aa/article/details/48033819
当初研究图割算法,跟着思路一路看文章过来,从图像分割开始看起,渐渐的看到立体匹配这块,开始一直做立体匹配的相关内容,后来发现看文章实在看的太少了。而且高档次的文章看的更少,以至于停留在非常低端已经很成熟的方法的改进中不能自拔,现在要毕业了才想起看文章去写国内外的研究背景,却突然给我了很多idea,但是时间确实有限,希望刚接触这个的同行们从这些人的成果中多少有点启示,我提两点趋势:
1.算法的并行性,立体匹配好的算法不一定要求多高的精度,我认为实时性是最重要的,例如工业控制,和无人驾驶汽车,机器人导航对实时性的要求。
2.组合的算法(综合起来的工程性算法),立体匹配作为一个已经应用在实际工业领域的研究问题,是一个复杂的工业或者说工程问题,是自成体系的问题,没有一个复杂的的算法能够一蹴而就的解决问题,需要从头到尾多个算法的组合。
甚至不夸张的说,从源头的摄像机矫正开始下功夫,直到最后面的交叉检验视差求精,每一个环节将误差和计算量降低到最少,各个环节的改进都能为整体流程做贡献,而这些正是我们做工程的魅力所在,一点一滴精益求精。
3.创新性,立体匹配上进行创新,需要在立体匹配的整个过程和应用场景上下功夫,比如特定目标的立体匹配。对目标图像进行目标检测后的行人立体匹配等,我认为都可以作为一个研究思路,将算法组合起来,完成一个特定的需求,而这本身就偏应用了。















 672
672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









