







前言
文中算法公式摘自《捷联惯导算法与组合导航原理》(严恭敏、翁浚 编著)、《惯性导航》(秦永元 编著),其他理解仅代表个人观点。本文是对位置更新算法,按照自己学习的思路整理得到的学习笔记。
一、位置更新算法

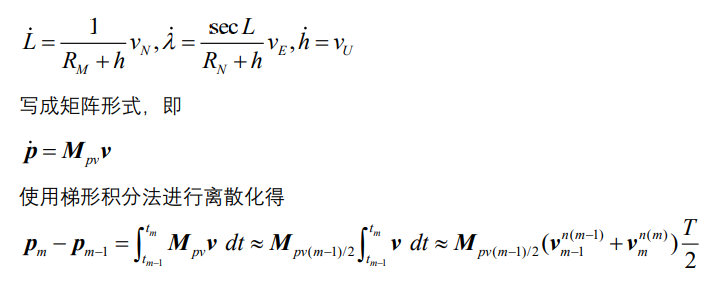
二、位置微分方程
位置更新算法由位置微分方程求解得到,位置微分方程不难理解,即位置的导数是速度,速度的积分是位置。
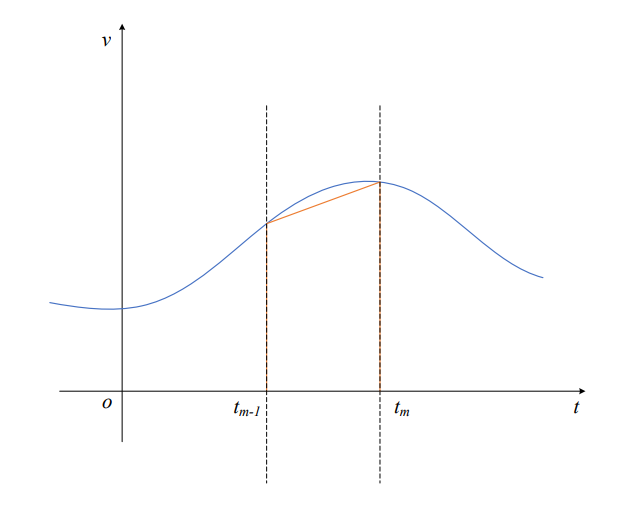
梯形积分法,即将图示积分近似为图中梯形部分的面积,矩阵中的数据采用中点时刻的外推数据参与计算。
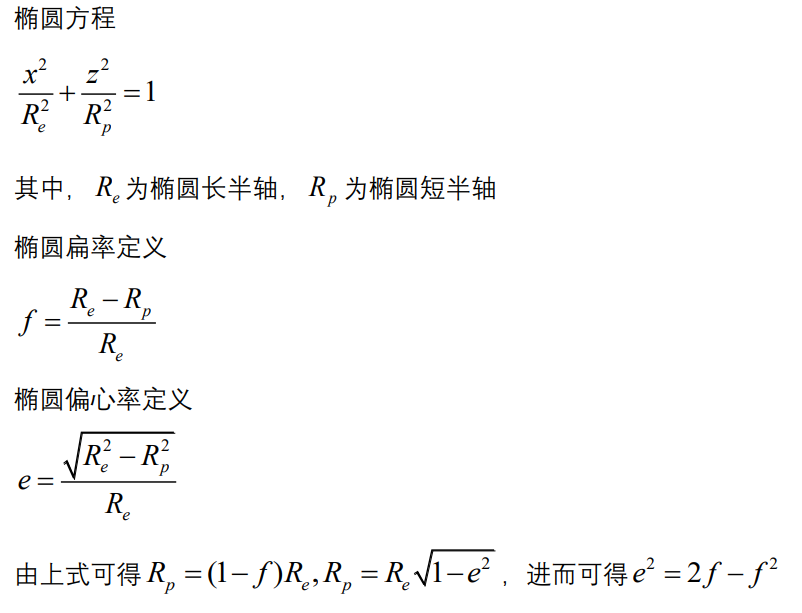
三、地球参数
高度微分方程容易理解,对于纬度和经度微分方程的理解需要对地球参数进行了解。
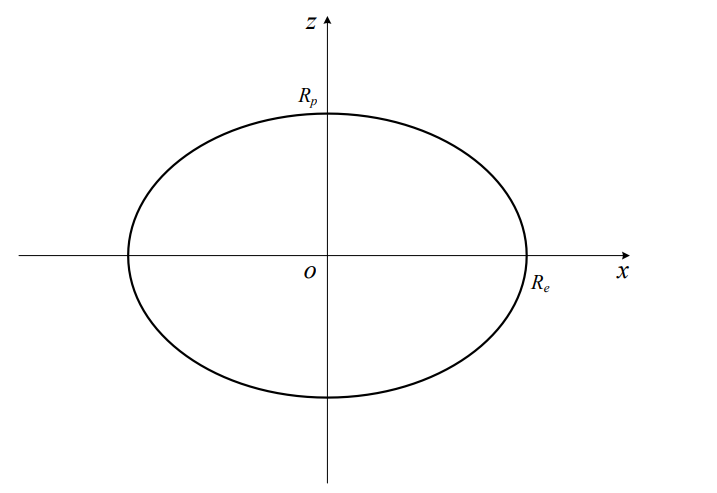
地球旋转椭球体概念
将地球近似成椭球体,即下如所示的椭圆,绕z轴旋转形成的椭球体。
四、经度微分方程
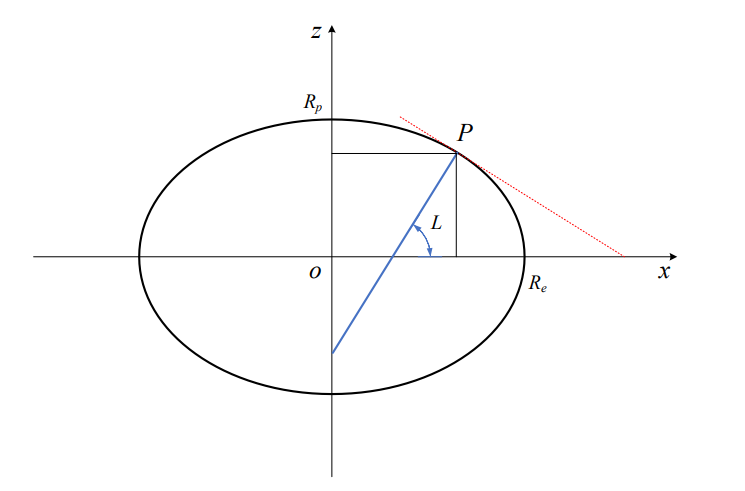
如上图所示,P点为任意一点,红色虚线为P点处的切线,蓝色线条为P点处的切线的垂线,该线称为地理垂线,与x轴的夹角为纬度,该线长度记为RN,斜率为tanL,P点的坐标为x、z。
对椭圆方程 进行求导
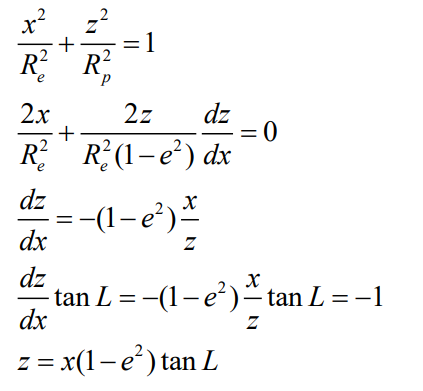
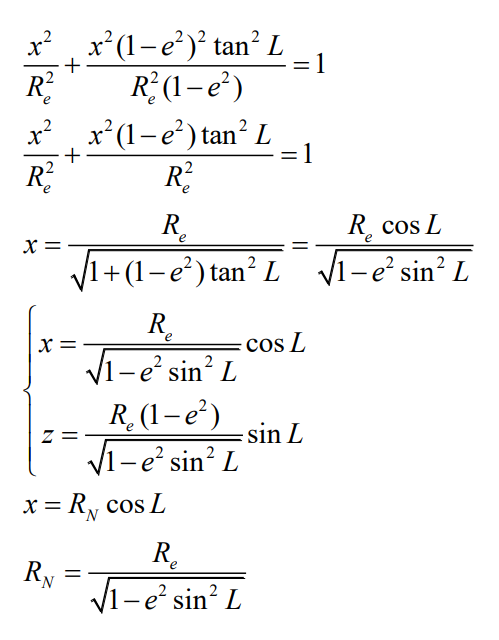
代入椭圆方程
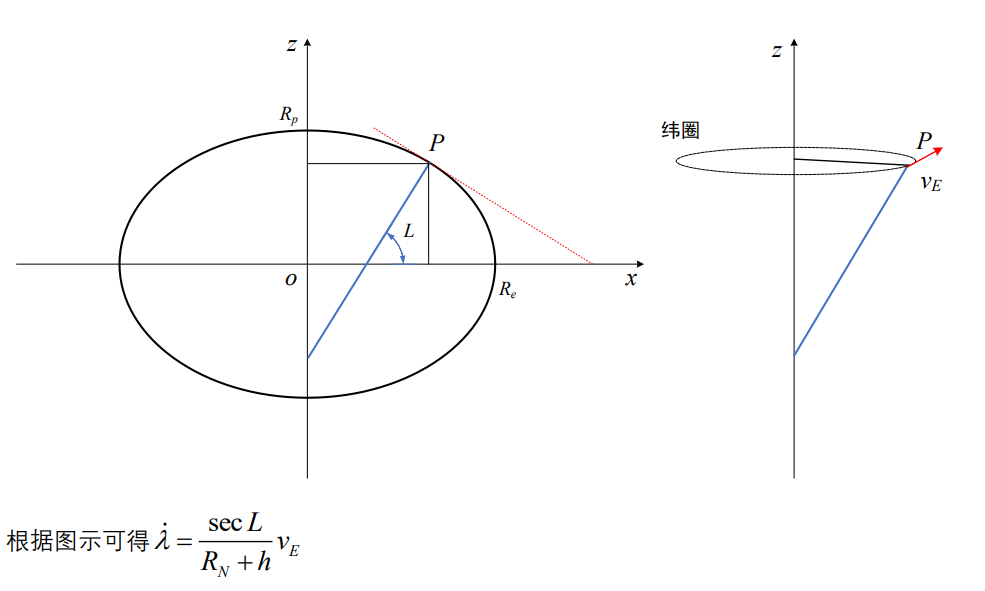
东向速度绕z轴旋转,半径为P点x轴的坐标
五、纬度微分方程
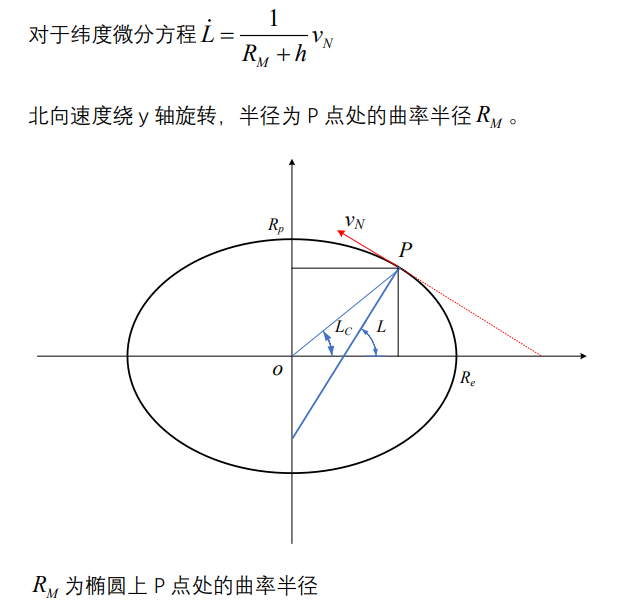
椭圆参数方程选取

P点处切线和蓝色线垂直
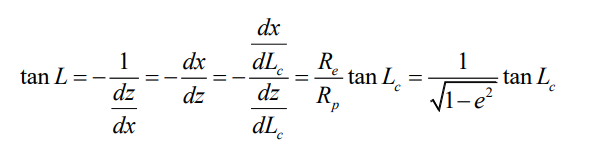
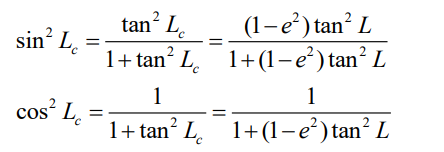
由三角关系可得
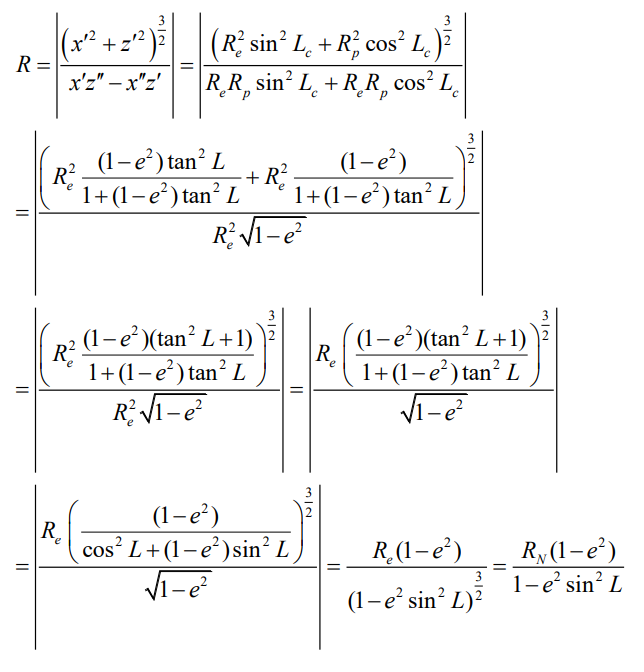
椭圆曲率半径求解

















 9906
9906

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









