







前言
本文是对姿态更新算法的理解。
一、姿态更新算法
地心惯性坐标系(i系)绝对不动的惯性参考坐标系,与时间无关。
个人理解:
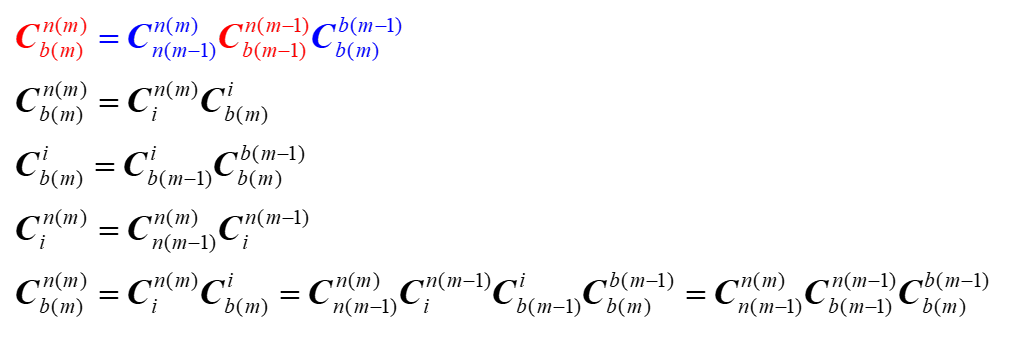
地心惯性坐标系是绝对不动的,因此机体系到导航系的姿态矩阵可以先由机体系到地心惯性系,然后由地心惯性系到导航坐标系变化。
根据链乘原理,从m-1到m时刻,机体系到地心惯性系的变化由m-1时刻机体系到地心惯性系变化矩阵和机体系从m-1到m时刻的变化矩阵构成。地心惯性系到导航坐标系变化由m-1时刻地心惯性系到导航坐标系变化矩阵和导航系从m-1到m时刻的变化矩阵构成。
进而推导可得m时刻机体系到导航系的变换矩阵可由m-1时刻机体系到导航系的变换矩阵和m-1到m时刻导航系和机体系的变化矩阵连乘得到。因此后续重点在理解m-1到m时刻导航系和机体系的变化的姿态矩阵。
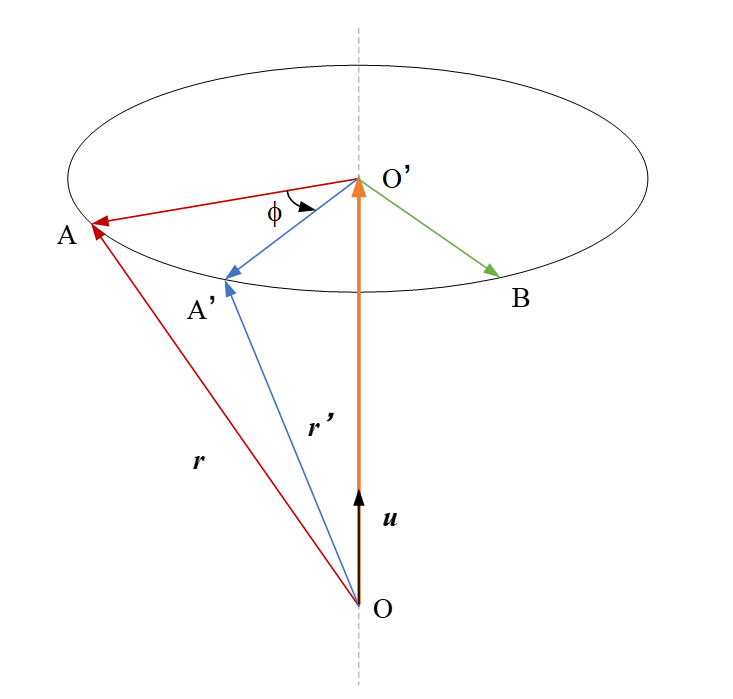
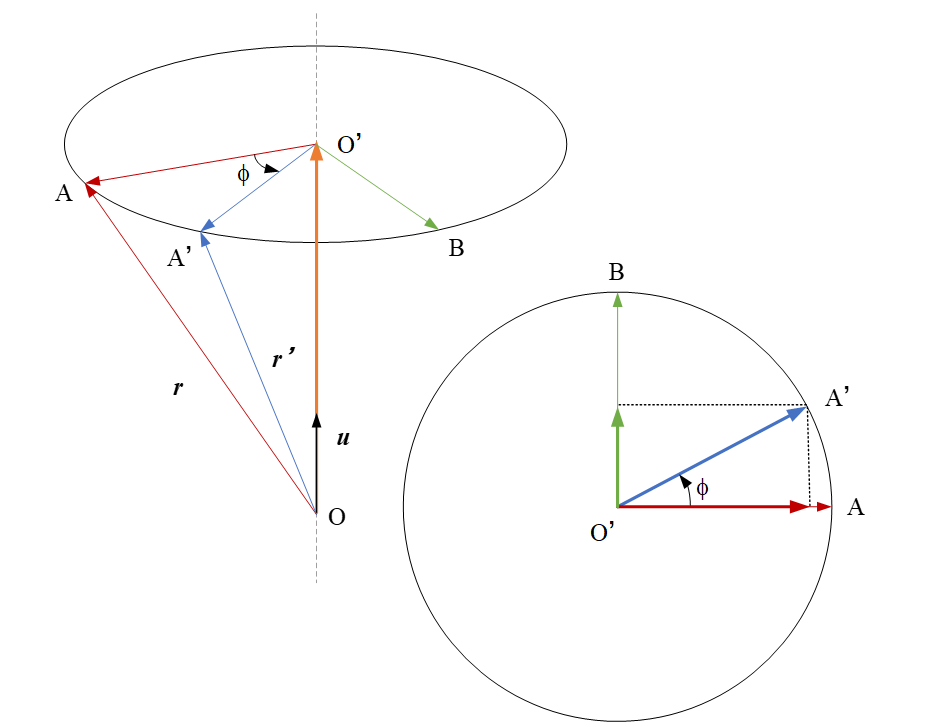
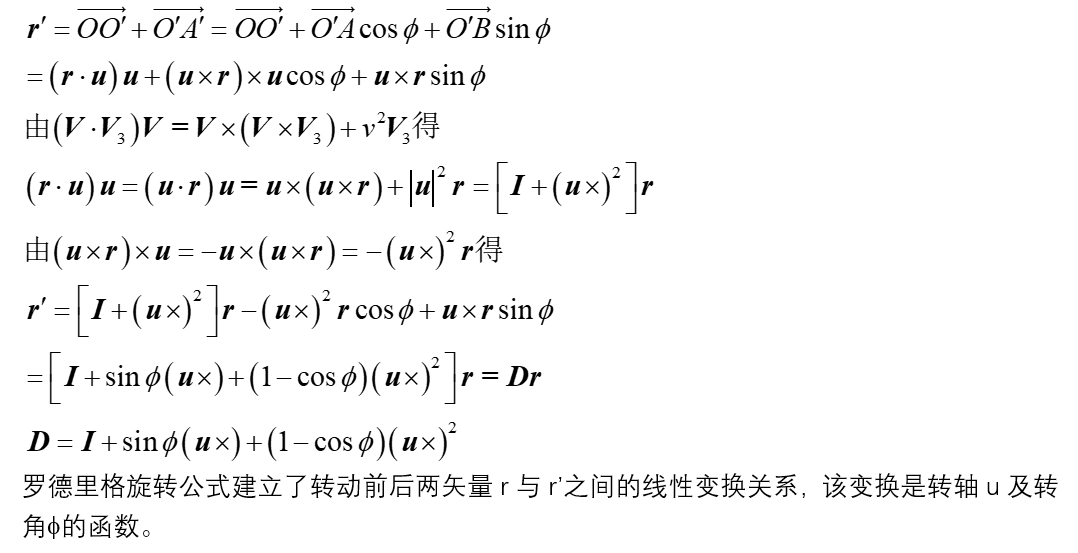
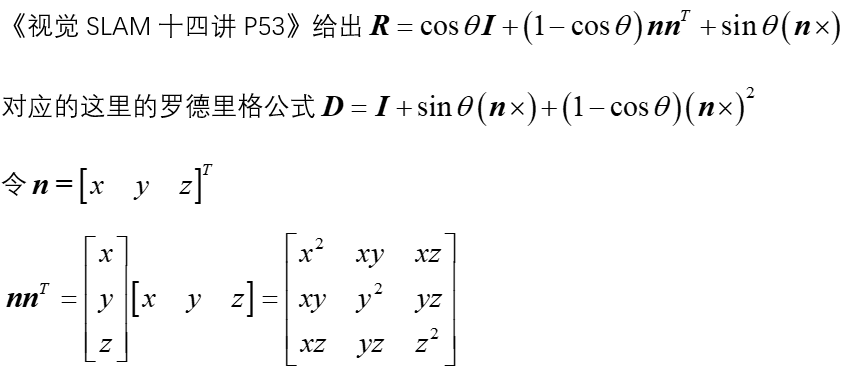
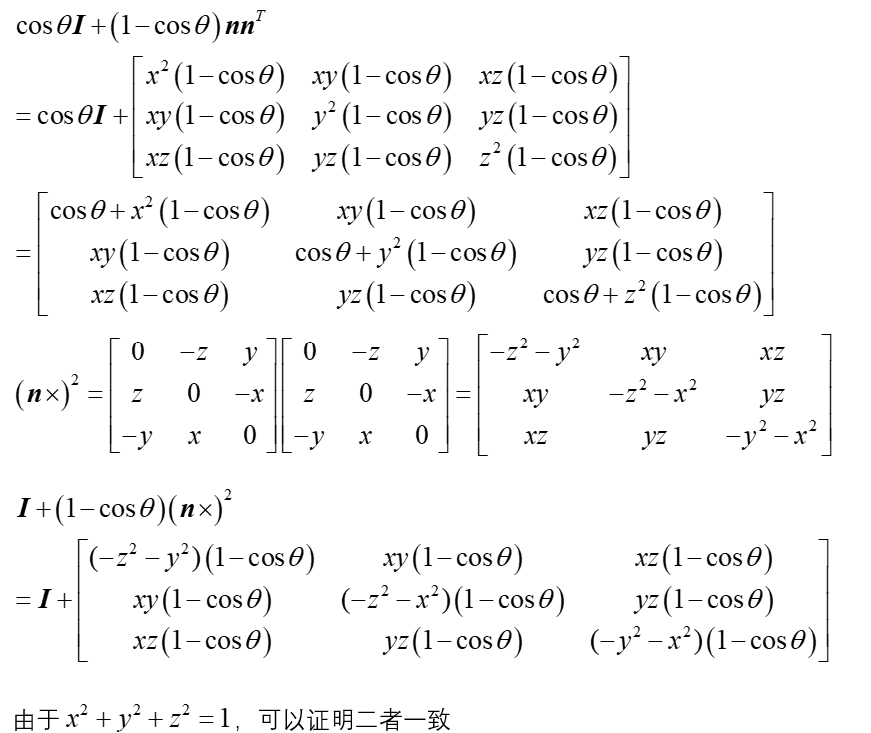
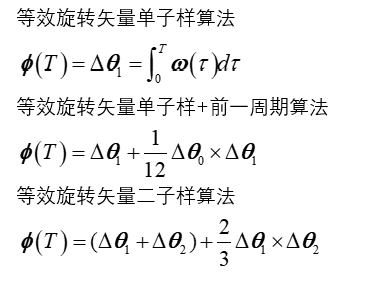
二、罗德里格旋转公式
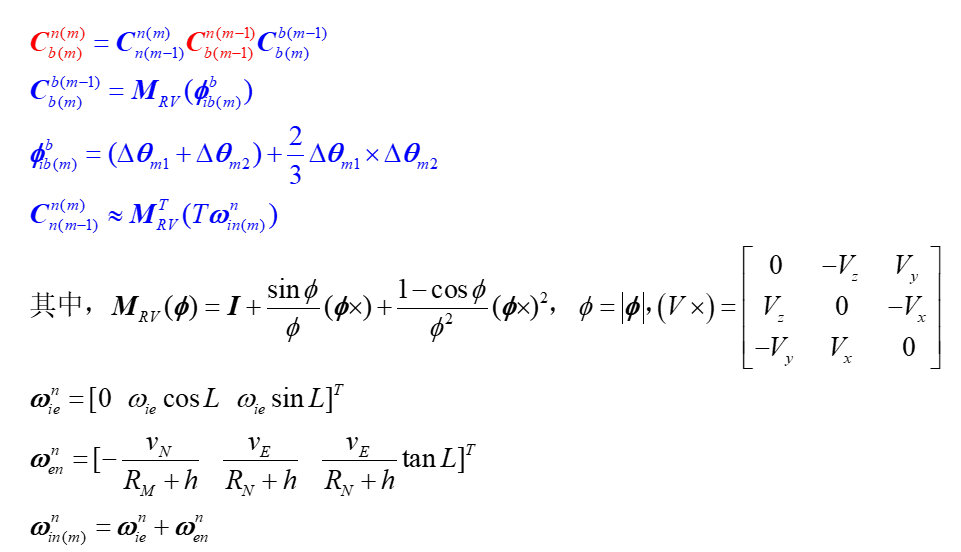
m-1到m时刻导航系和机体系的变化的姿态矩阵都是根据罗德里格旋转公式求解
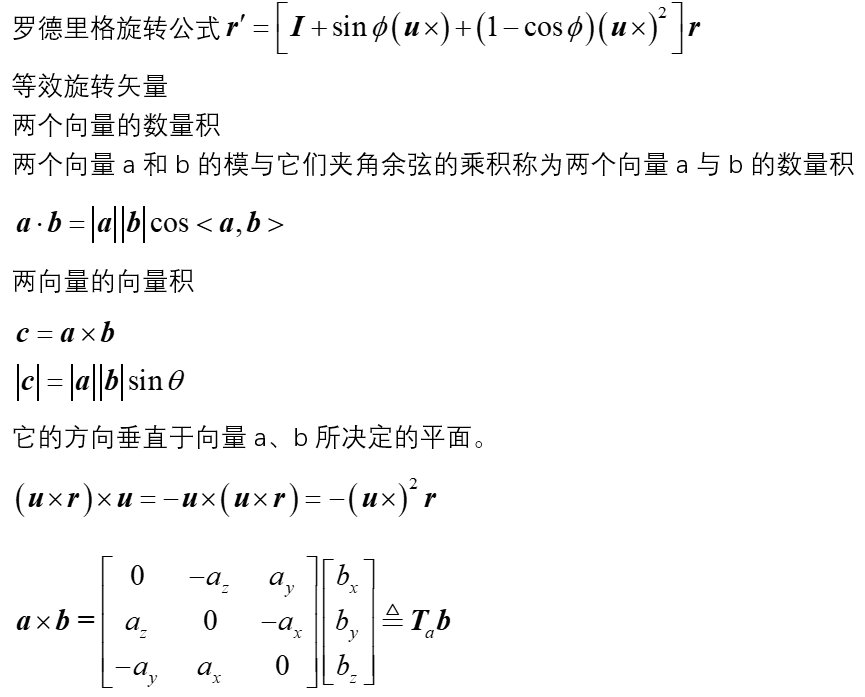
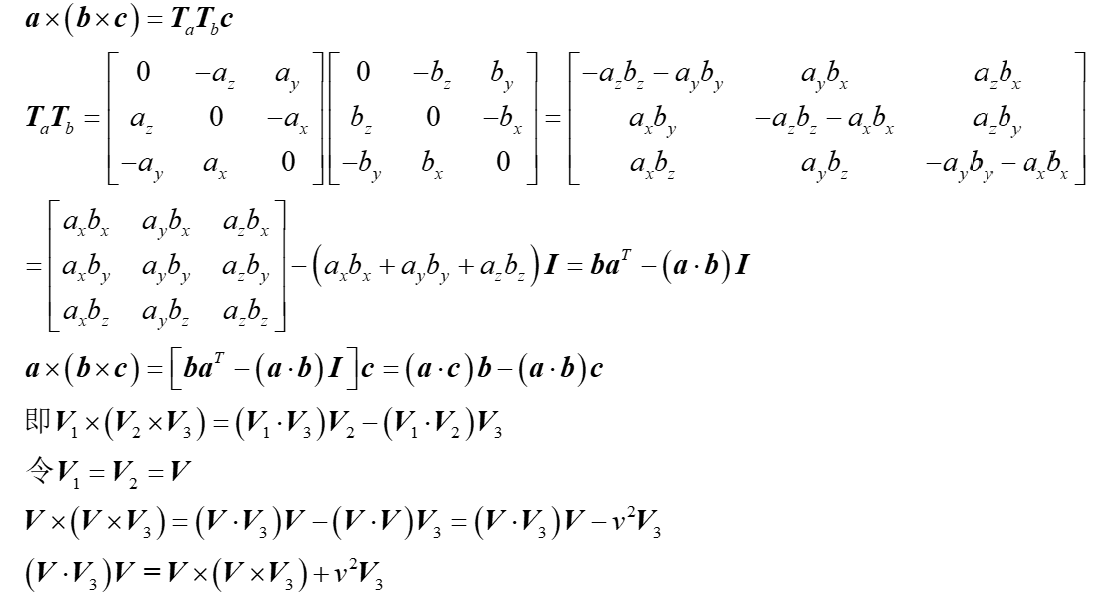
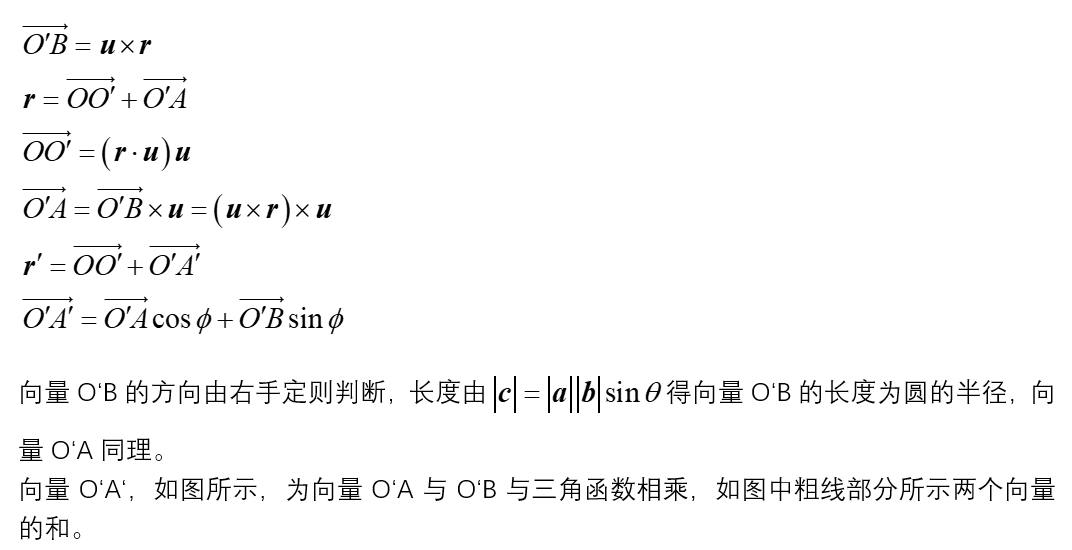
补充说明:

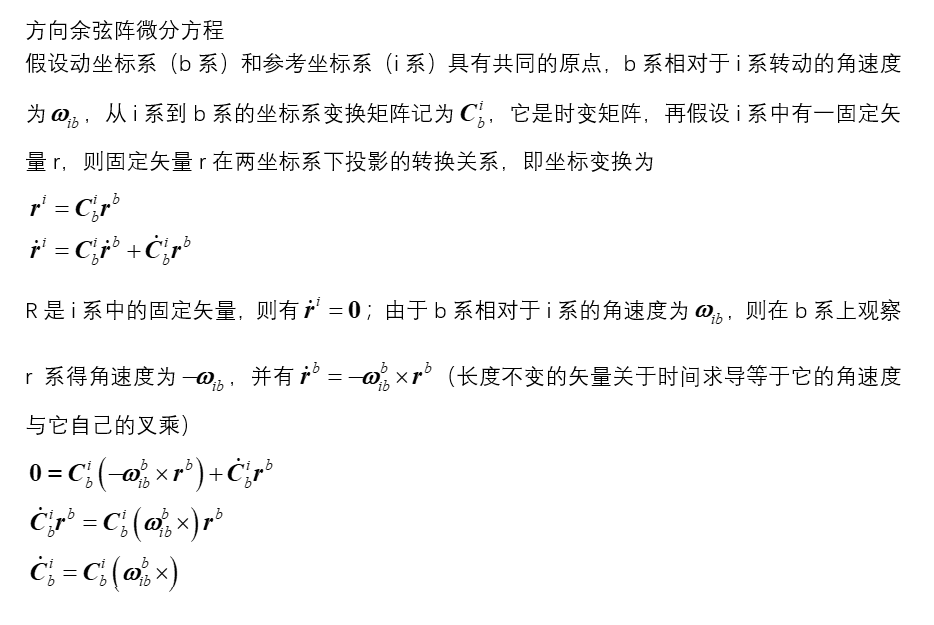
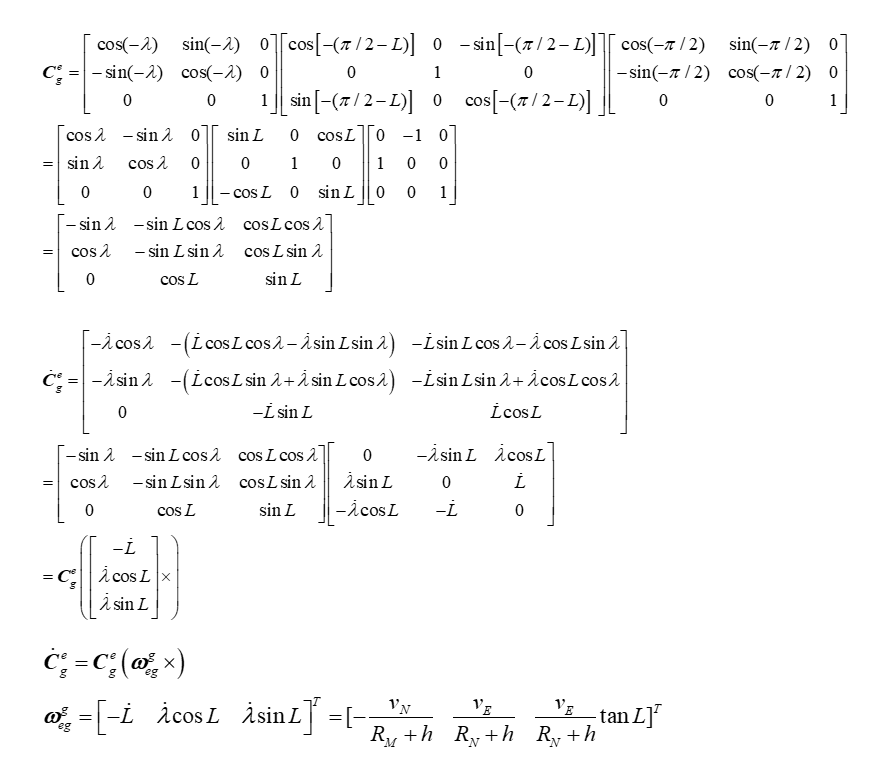
三、方向余弦阵微分方程
四、导航系坐标变换矩阵
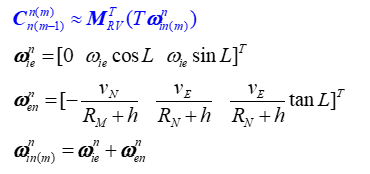
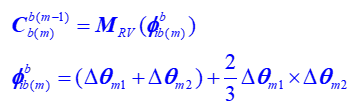
五、机体系坐标变换矩阵















 771
771











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









