






一.配件准备
除了购买了一块单独的RDK X5主板之外,还购买了一块128G高速内存卡(板载没有内存),铝合金散热外壳,树莓派5官方电源(5V5A),TYP-C数据线(闪连接),内存卡读卡器(非必备)。
因为板载没有内存,只有4G/8G运存,建议内存卡最好要大于一点,最好64G以上的高速卡,另外特别注意的是金士顿的内存卡不建议使用,经常有莫名其妙的问题。

电源如果使用5V3A,在驱动一些外设是可能会有低电警告甚至掉电重启,所以就购买了5V5A的树莓派电源。

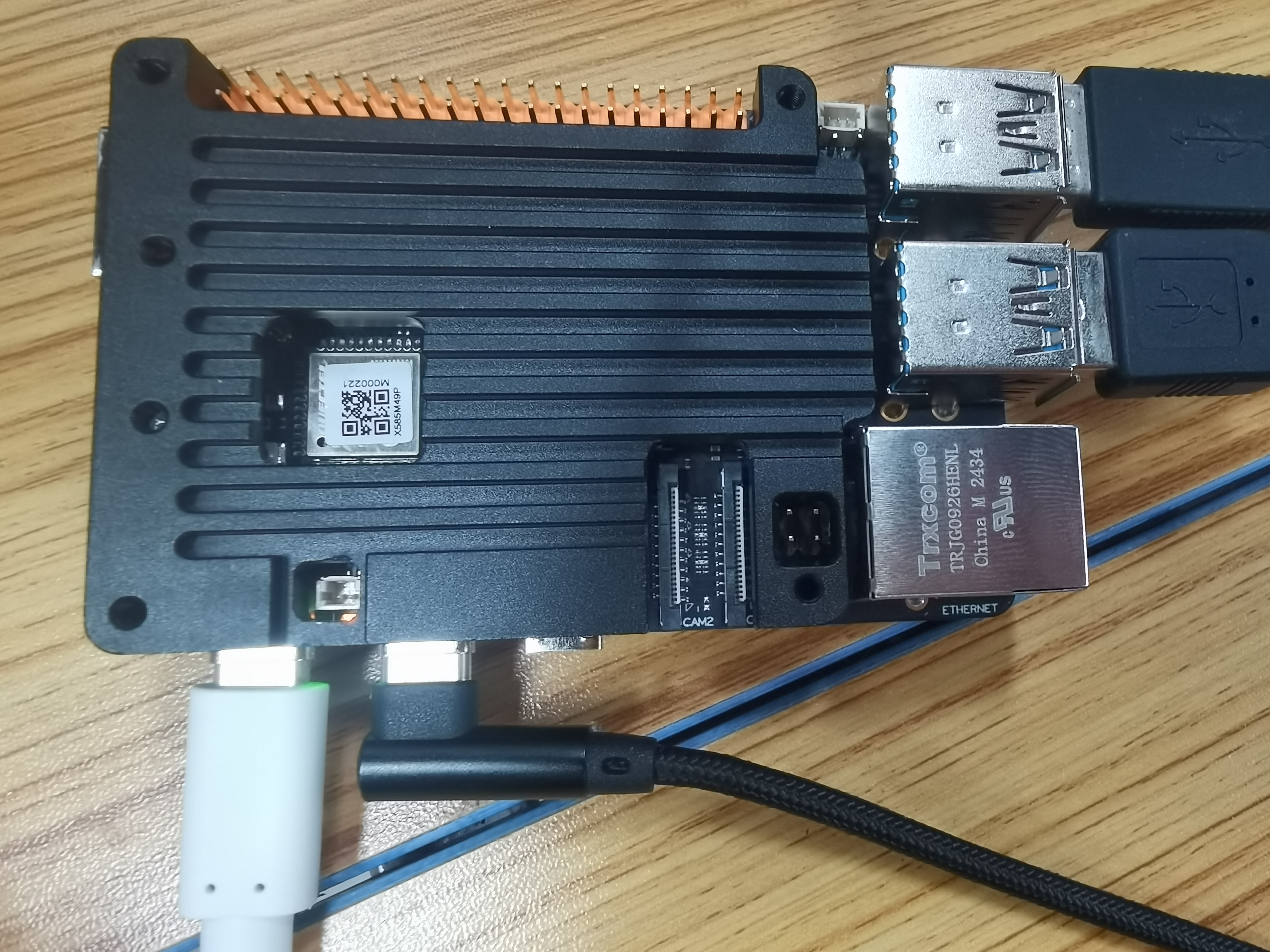
板子的散热原本打算自己画一个散热外壳,然后CNC加工,这样成本低,也可以更加灵活的设计,但是最近任务比较多,时间不够,就购买的现成的散热外壳,外观很好看,效果也很好,能够充分的散热,,在充分包裹保护开发板的同时也没有影响各个接口的使用。
二.上手体验
1.RDK sudio
1)镜像烧录
拿到板子后我是根据用户手册下载镜像,然后将镜像烧录的内存卡,然后再将内存卡插到RDK X5上,然后在进行系统相关配置。 如果采用内存卡烧录的方式烧录就需要用到内存卡读卡器。也可以使用RDK Studio通过数据线闪连 连接进行烧录和系统更新。
我外接了一块屏幕进行系统设置,如果没有屏幕也可以参考文档RDK DOC ,通过VCN和SHH进行修改系统设置。
需要配置WiFi 蓝牙 网络 中文系统操作,用户文档写的很清楚,就不详细的说明了。
2)RDK Studio 使用体验
1.下载:RDK Studio 可以通过链接下载,目前只有Windows版本 MAC以及 Linux版本后期会更新,占用内存不大可能网络关系,下载了30分钟左右,建议下载压缩包,下载完成打开后我这里有一个报错,但是不影响使用。
2.连接:给RDK X5供电,然后用数据线练接板字和电脑,此外还要在电脑上进行一下网络设置,以使电脑和板子在同一个网络下,具体参考:https://developer.d-robotics.cc/forumDetail/253775338902237326
3.使用:连接RDK Studio 后可以通过Studio 显示板子联网状态 USB摄像头连接状态,同时也可以安装一些插件。安装好插进后,点击VScode图标,便可以直接跳转到VScode 与RDK X5进行ssh连接。前提是在VScode中要安装 Romote-ssh 插件,需要注意点是VScode最好更新的最新的版本,如果不是最新版本可能会遇到图标不显示的问题。可参考:vscode连接远程服务器(傻瓜式教学)-CSDN博客


通过RDK Studio 成功运行了两个案例,一个是摄像头拍照了,另一个就是摄像头推理。
摄像头问题,拍照效果不是很好。
3)建议:在使用过程中发现Studio界面的重启不是很好用,希望可以进行优化,并退出更好的使用教程。
2.NodeHUb
1) 在NodeHUb中我体验了目标检测算法以及火山引擎大模型网关(未成功)。目标检测模型我使用的是YOLOV10 ,整体使用下来效果非常好,几乎没有延迟,和在电脑上跑的效果一样,可以参考:用户手册RDK DOC 以及:https://developer.d-robotics.cc/forumDetail/256524798723994628
2)在使用火山引擎大模型网关的时候一定要准备好自己论坛的账户和密码后面验证的时候要用的到。火山引擎大模型网关使用可以参考:https://developer.d-robotics.cc/nodehubdetail/1831253404334641154 (使用的过程中忘记截图了,下次一定。
3.ModelZOO
ModelZoo 相当于一个模型仓库,丰富多样的模型案例。参考链接:RDK DOC

自身网络问题暂时无法使用。

















 2796
2796

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









