







Sharp GP2Y0A21红外线测距传感器
测试,使用5v-vcc。
Sharp GP2Y0A21是一颗红外线测距传感器,易于使用,价钱廉宜,且低功耗。 规格如下:
距离测量范围:10至80cm(4“到32”)
工作电压:4.5V至5.5V
输出类型:模拟电压
平均功耗:35mA
峰值功耗:约200mA
允许的最大角度:> 40°
更新频率/周期:25 Hz/40毫秒
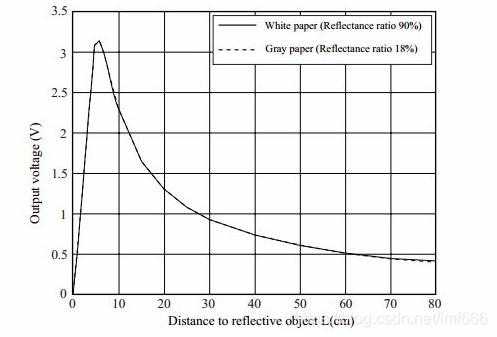
Sharp GP2Y0A21是一颗非线性(nonlinear)测距传感器,且是非连续性(non-continuity)输出,当距离小于8厘米,传感器将不能正常工作。其测距特性如图所示。

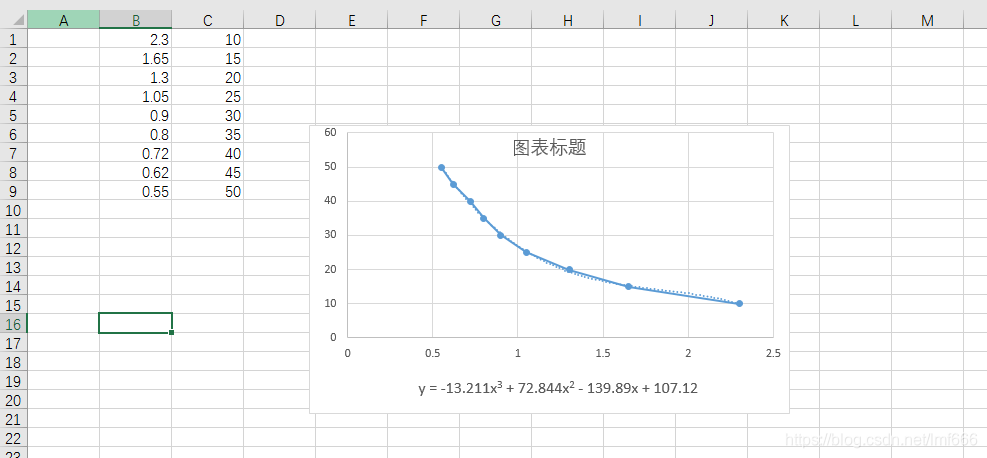
excel添加趋势线。得到电压和距离的关系公式。
代码
用ADC3的IN11,PC1引脚。
Vref=3.3V。
头文件
#ifndef __SHARP2Y0A21_H
#define __SHARP2Y0A21_H
#include "sys.h"
#include "delay.h"
#include "adc3.h"
#define Adc3IN11SHUIWEI_READ_TIMES 10 //定义光敏传感器读取次数,读这么多次,然后取平均值
void ShuiWeiSensor_Init(void); //初始化光敏传感器
float ShuiWeiSensor_Get_Val(void); //读取光敏传感器的值
#endif
C文件
#include "SHARP2Y0A21.h"
#include "adc3.h"
//初始化ADC,不用修改
//这里我们仅以规则通道为例
//初始化传感器,需要修改端口和引脚号,这里是c出口,c1引脚,ADC3的IN11
void ShuiWeiSensor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);//使能GPIOF时钟
//先初始化ADC3通道11 IO口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;//PC1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;//模拟输入
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;//不带上下拉
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化
Adc3_Init();//初始化ADC3
}
//Pc1=IN11,需要修改,15通道
float ShuiWeiSensor_Get_Val(void)
{
u32 temp_val=0;
float distemp=0.0;
u8 t;
for(t=0;t<Adc3IN11SHUIWEI_READ_TIMES;t++)
{
temp_val+=Get_Adc3(ADC_Channel_11); //读取ADC值,通道11
delay_ms(5);
}
temp_val/=Adc3IN11SHUIWEI_READ_TIMES;//得到平均值,这个是平均的ADC,
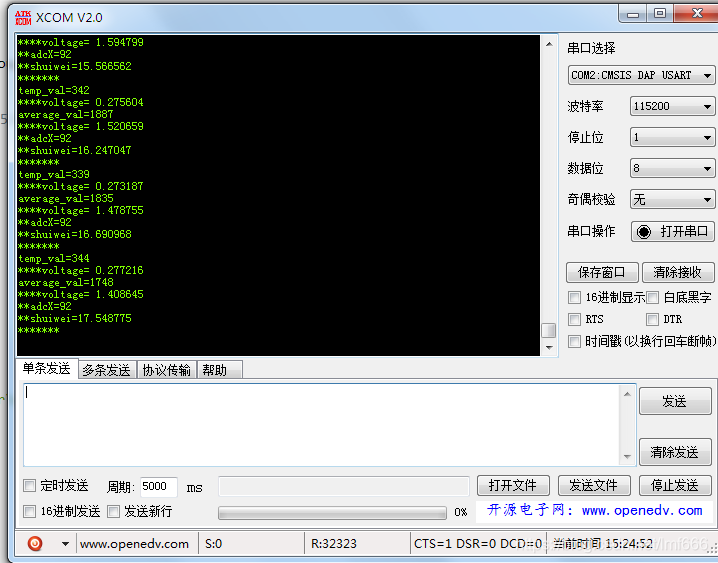
printf("average_val=%d\r\n",temp_val);
distemp=temp_val*3.3/4095;
printf("****voltage= %f\r\n",distemp);//电压值
//电压对应距离
distemp=(-13.2*distemp*distemp*distemp)+72.84*distemp*distemp-140*distemp+107.12;
return distemp;
// if(temp_val>4000)temp_val=4000;
// //简单量化后,处理成 0~100 的光强值。0 对应最暗,100 对应最亮
// return (u8)(100-(temp_val/40));
}
ADC3.h
#ifndef __ADC3_H
#define __ADC3_H
#include "sys.h"
//
void Adc3_Init(void); //ADC通道初始化
u16 Get_Adc3(u8 ch); //获得某个通道值
u16 Get_Adc_Average(u8 ch,u8 times);//得到某个通道给定次数采样的平均值
#endif
ADC3.c
#include "adc3.h"
#include "delay.h"
//初始化ADC
//这里我们仅以规则通道为例
void Adc3_Init(void)
{
ADC_CommonInitTypeDef ADC_CommonInitStructure;
ADC_InitTypeDef ADC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC3, ENABLE); //使能ADC3时钟
RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC3,ENABLE); //ADC3复位
RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC3,DISABLE); //复位结束
ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent;//独立模式
ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles;//两个采样阶段之间的延迟5个时钟
ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; //DMA失能
ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div4;//预分频4分频。ADCCLK=PCLK2/4=84/4=21Mhz,ADC时钟最好不要超过36Mhz
ADC_CommonInit(&ADC_CommonInitStructure);//初始化
ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//12位模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE;//非扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//关闭连续转换
ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;//禁止触发检测,使用软件触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//右对齐
ADC_InitStructure.ADC_NbrOfConversion = 1;//1个转换在规则序列中 也就是只转换规则序列1
ADC_Init(ADC3, &ADC_InitStructure);//ADC初始化
ADC_Cmd(ADC3, ENABLE);//开启AD转换器
}
//获得ADC值
//ch:通道值 0~16 ADC_Channel_0~ADC_Channel_16
//返回值:转换结果
u16 Get_Adc3(u8 ch)
{
//设置指定ADC的规则组通道,一个序列,采样时间
ADC_RegularChannelConfig(ADC3, ch, 1, ADC_SampleTime_480Cycles ); //ADC3,ADC通道,480个周期,提高采样时间可以提高精确度
ADC_SoftwareStartConv(ADC3); //使能指定的ADC3的软件转换启动功能
while(!ADC_GetFlagStatus(ADC3, ADC_FLAG_EOC ));//等待转换结束
return ADC_GetConversionValue(ADC3); //返回最近一次ADC3规则组的转换结果
}
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "lcd.h"
#include "adc3.h"
#include "usart.h"
#include "TOILHUMSENSOR.h"
#include "SHARP2Y0A21.h"
//作用,读取PF5,ADC3IN14的数值
int main(void)
{
u8 adcx;
float shuiwei=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168); //初始化延时函数
uart_init(115200); //初始化串口波特率为115200
AdcHumSensor_Init();
ShuiWeiSensor_Init();
printf("**adc......\r\n");
while(1)
{
adcx=AdcHumSensor_Get_Val();
shuiwei=ShuiWeiSensor_Get_Val();
printf("**adcX=%d\r\n",adcx);
printf("*************----shuiwei=%f\r\n",shuiwei);
printf("^^^\r\n");
delay_ms(2000);
}
}

















 7257
7257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









