







 本文介绍了BLDC电机正转控制中,霍尔传感器的二进制相加与驱动六步法的关系。通过分析示例代码,探讨了在实际应用中,如何根据霍尔信号启动相应通道的正反向输出口,以实现高效驱动。
本文介绍了BLDC电机正转控制中,霍尔传感器的二进制相加与驱动六步法的关系。通过分析示例代码,探讨了在实际应用中,如何根据霍尔信号启动相应通道的正反向输出口,以实现高效驱动。
硬石开发版学习记录
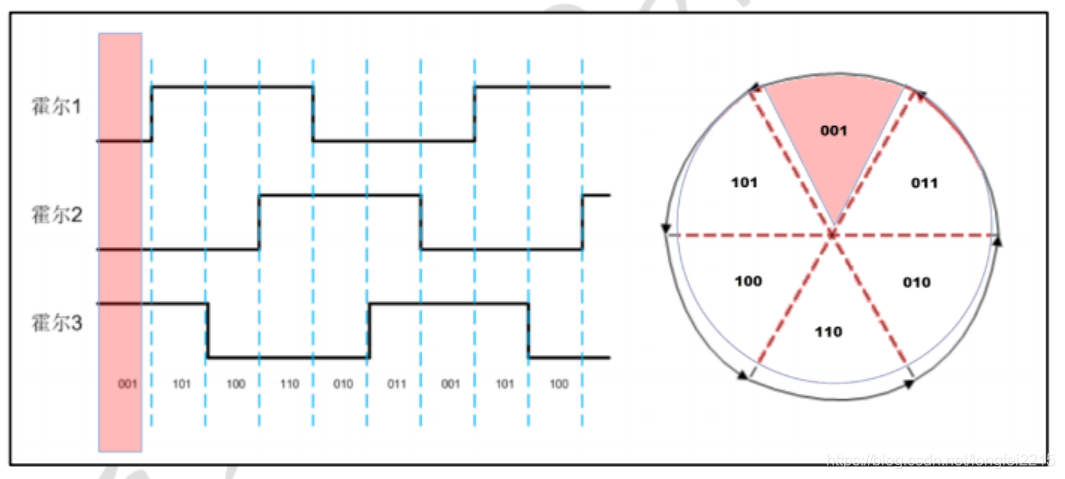
正转控制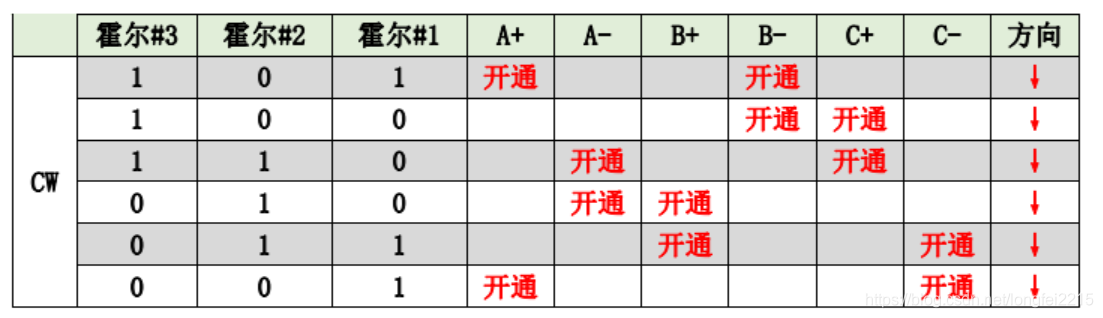


正向和反向对应的霍尔二进制相加=7,只用一个是switch函数就可以了
给出的代码,对比前面的例程,没有使用的端口就没有start;
比如case1:C+A-, 仅仅start了通道3的正向输出口,和通道1的反向输出口,前面六步法里面的通道对应的正反输出口都start了,觉得奇怪,应该是举例用的,实际应该不用
/* 获取霍尔传感器引脚状态,作为换相的依据 */
__IO uint32_t tmp = 0;
uwStep = HallSensor_GetPinState();
if(Dir == CW)
{
uwStep = (uint32_t)7 - uwStep; // 根据顺序表的规律 CW = 7 - CCW;
}
/*---- 定义定时器OC1为A(U)相 OC2为B(V)相,OC3为C(W)相 ---- */
/*---- 定义uWSt 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 964
964

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









