






本笔记为阿里云天池龙珠计划深度学习训练营的学习内容,链接为:
目录
本项目使用 DCGAN 模型,在自建数据集上进行实验。
本项目使用的数据集是人脸嘴巴区域——微笑表情的数据集
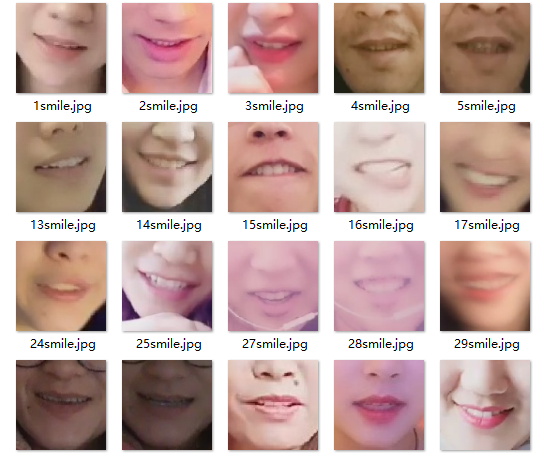
数据集文件夹结构如下,图片供 4357 张
├─mouth
│ └─smile
├─1smile.jpg
├─2smile.jpg
├─3smile.jpg
└─.... 同时,创建一个 out 文件夹来保存训练的中间结果,主要就是看 DCGAN 是如何从一张噪声照片生成我们期待的图片
import osimport timeif os.path.exists("out"):print("移除现有 out 文件夹!")os.system("rm -r ./out")time.sleep(1)print("创建 out 文件夹!")os.mkdir("./out")
移除现有 out 文件夹! 创建 out 文件夹!
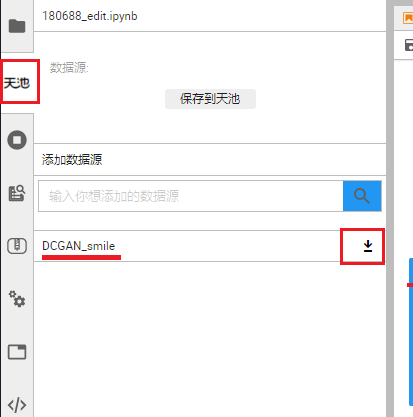
- 在加载该 NoteBook 文件时,会自动加载数据集至
./download/mouth文件夹下。若没有自动加载数据集,则需要手动加载,手动加载方式如下:
点击本页面左方 天池 按钮(需要在 CPU 环境下),点击 mouth 旁边的下载按钮,就会自动加载数据集了!
运行下面代码,对数据集进行解压。
由于图片数量多,解压需要一定时间
!unzip mouth.zip -d ./mouthprint("解压完毕!")Archive: mouth.zip creating: ./mouth/smile/ inflating: ./mouth/smile/1000smile.jpg inflating: ./mouth/smile/1001smile.jpg inflating: ./mouth/smile/1002smile.jpg ......
导入所需包
from __future__ import print_function # 在python2中使用python3的打印函数import os # 与操作系统进行交互import random # 创建随机数import torchimport torch.nn as nn # 导入torch的nn模块,用于构建神经网络的模型import torch.nn.parallel # 多个GPU时并行运行import torch.optim as optim # torch的各种优化器import torch.utils.data # data模块下的DataLoader类用于批量加载数据import torchvision.datasets as dset # 从文件夹读取数据集,或者从网络下载数据集import torchvision.transforms as transforms # 图像数据转换import torchvision.utils as vutils # 图像处理相关的工具函数import numpy as np # 用于数据的科学计算import matplotlib.pyplot as plt # 画图import matplotlib.animation as animation # 图片合成动画from IPython.display import HTML # HTML的方式展示动画os.environ['KMP_DUPLICATE_LIB_OK'] = 'True' # 通过os.environ设置环境变量'KMP_DUPLICATE_LIB_OK'为True,允许同时有多个OpenMP链接到程序
基本参数配置
# 设置一个随机种子,方便进行可重复性实验manualSeed = 999print("Random Seed: ", manualSeed)random.seed(manualSeed) # 设置python的随机数种子torch.manual_seed(manualSeed) # 设置torch的随机数种子# 数据集所在路径dataroot = "mouth/"# 数据加载的进程数,0表示只有主进程加载数据,大于0表示指定数量的worker进程加载数据,主进程则不参与加载数据workers = 0# Batch size 大小batch_size = 64# Spatial size of training images. All images will be resized to this# size using a transformer.# 图片大小image_size = 64# 图片的通道数nc = 3# Size of z latent vector (i.e. size of generator input)nz = 100# Size of feature maps in generatorngf = 64# Size of feature maps in discriminatorndf = 64# Number of training epochsnum_epochs = 10# Learning rate for optimizerslr = 0.0003# Beta1 hyperparam for Adam optimizersbeta1 = 0.5# Number of GPUs available. Use 0 for CPU mode.ngpu = 1# Decide which device we want to run ondevice = torch.device("cuda:0" if (torch.cuda.is_available() and ngpu > 0) else "cpu")Random Seed: 999
导入数据集
# We can use an image folder dataset the way we have it setup.# Create the datasetdataset = dset.ImageFolder(root=dataroot,transform=transforms.Compose([transforms.Resize(image_size),transforms.CenterCrop(image_size),transforms.ToTensor(), # 图像数据的取值范围[0,1]transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)), # 归一化图像数据的取值范围[-1,1]]))# Create the dataloaderdataloader = torch.utils.data.DataLoader(dataset, batch_size=batch_size,shuffle=True, num_workers=workers)
简单看一下我们的原始数据集长啥样
# Plot some training imagesreal_batch = next(iter(dataloader))plt.figure(figsize=(8,8))plt.axis("off")plt.title("Training Images")# normalize=True将图像归一化到(0,1),通过减去最小像素值并除以最大像素值 # to(device)将数据复制到GPU下处理性能更高,之后再通过cpu()将数据复制到CPU下以执行numpy命令 plt.imshow(np.transpose(vutils.make_grid(real_batch[0].to(device)[:64], padding=2, normalize=True).cpu(),(1,2,0)))# plt.show()
[5]:
<matplotlib.image.AxesImage at 0x7f67b59d9cf8>

定义生成器与判别器
# 权重初始化函数,为生成器和判别器模型初始化def weights_init(m):classname = m.__class__.__name__ # 取得模块的名称if classname.find('Conv') != -1:nn.init.normal_(m.weight.data, 0.0, 0.02) # 卷积层的权重初始化为均值0,标准差0.02的正态随机数elif classname.find('BatchNorm') != -1:nn.init.normal_(m.weight.data, 1.0, 0.02) # 归一化层的权重初始化为均值1,标准差0.02的正态随机数nn.init.constant_(m.bias.data, 0) # 归一化层的偏置初始化为0# Generator Codeclass Generator(nn.Module):def __init__(self, ngpu):super(Generator, self).__init__()self.ngpu = ngpuself.main = nn.Sequential(# input is Z, going into a convolution# 因为归一化层中添加偏置,所以卷积层不加偏置
nn.ConvTranspose2d( nz, ngf * 8, 4, 1, 0, bias=False),nn.BatchNorm2d(ngf * 8),nn.ReLU(True), # 激活输出覆盖原有数据# state size. (ngf*8) x 4 x 4nn.ConvTranspose2d(ngf * 8, ngf * 4, 4, 2, 1, bias=False),nn.BatchNorm2d(ngf * 4),nn.ReLU(True),# state size. (ngf*4) x 8 x 8nn.ConvTranspose2d( ngf * 4, ngf * 2, 4, 2, 1, bias=False),nn.BatchNorm2d(ngf * 2),nn.ReLU(True),# state size. (ngf*2) x 16 x 16nn.ConvTranspose2d( ngf * 2, ngf, 4, 2, 1, bias=False),nn.BatchNorm2d(ngf),nn.ReLU(True),# state size. (ngf) x 32 x 32nn.ConvTranspose2d( ngf, nc, 4, 2, 1, bias=False),nn.Tanh() # Tanh激活的输出值范围[-1,1]# state size. (nc) x 64 x 64)def forward(self, input):return self.main(input)class Discriminator(nn.Module):def __init__(self, ngpu):super(Discriminator, self).__init__()self.ngpu = ngpuself.main = nn.Sequential(# input is (nc) x 64 x 64nn.Conv2d(nc, ndf, 4, 2, 1, bias=False),nn.LeakyReLU(0.2, inplace=True), # 因为真实数据和生成器生成数据的值范围均是[-1,1],所以这里用LeakyReLU激活# state size. (ndf) x 32 x 32nn.Conv2d(ndf, ndf * 2, 4, 2, 1, bias=False),nn.BatchNorm2d(ndf * 2),nn.LeakyReLU(0.2, inplace=True),# state size. (ndf*2) x 16 x 16nn.Conv2d(ndf * 2, ndf * 4, 4, 2, 1, bias=False),nn.BatchNorm2d(ndf * 4),nn.LeakyReLU(0.2, inplace=True),# state size. (ndf*4) x 8 x 8nn.Conv2d(ndf * 4, ndf * 8, 4, 2, 1, bias=False),nn.BatchNorm2d(ndf * 8),nn.LeakyReLU(0.2, inplace=True),# state size. (ndf*8) x 4 x 4nn.Conv2d(ndf * 8, 1, 4, 1, 0, bias=False),nn.Sigmoid() # Sigmoid激活的输出值范围[0,1])def forward(self, input):return self.main(input)
初始化生成器和判别器
# Create the generatornetG = Generator(ngpu).to(device)# Handle multi-gpu if desiredif (device.type == 'cuda') and (ngpu > 1):netG = nn.DataParallel(netG, list(range(ngpu)))# Apply the weights_init function to randomly initialize all weights# to mean=0, stdev=0.2.netG.apply(weights_init) # apply函数先递归应用于netG的各子模块,再应用于netG模块自身# Print the modelprint(netG)# Create the DiscriminatornetD = Discriminator(ngpu).to(device)# Handle multi-gpu if desiredif (device.type == 'cuda') and (ngpu > 1):netD = nn.DataParallel(netD, list(range(ngpu)))# Apply the weights_init function to randomly initialize all weights# to mean=0, stdev=0.2.netD.apply(weights_init)# Print the modelprint(netD)Generator( (main): Sequential( (0): ConvTranspose2d(100, 512, kernel_size=(4, 4), stride=(1, 1), bias=False) (1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (2): ReLU(inplace=True) (3): ConvTranspose2d(512, 256, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (4): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (5): ReLU(inplace=True) (6): ConvTranspose2d(256, 128, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (7): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (8): ReLU(inplace=True) (9): ConvTranspose2d(128, 64, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (10): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (11): ReLU(inplace=True) (12): ConvTranspose2d(64, 3, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (13): Tanh() ) ) Discriminator( (main): Sequential( (0): Conv2d(3, 64, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (1): LeakyReLU(negative_slope=0.2, inplace=True) (2): Conv2d(64, 128, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (3): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (4): LeakyReLU(negative_slope=0.2, inplace=True) (5): Conv2d(128, 256, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (6): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (7): LeakyReLU(negative_slope=0.2, inplace=True) (8): Conv2d(256, 512, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False) (9): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (10): LeakyReLU(negative_slope=0.2, inplace=True) (11): Conv2d(512, 1, kernel_size=(4, 4), stride=(1, 1), bias=False) (12): Sigmoid() ) )
定义损失函数
# Initialize BCELoss functioncriterion = nn.BCELoss()
开始训练
# Create batch of latent vectors that we will use to visualize# the progression of the generatorfixed_noise = torch.randn(64, nz, 1, 1, device=device)# Establish convention for real and fake labels during trainingreal_label = 1.0fake_label = 0.0# Setup Adam optimizers for both G and DoptimizerD = optim.Adam(netD.parameters(), lr=lr, betas=(beta1, 0.999))optimizerG = optim.Adam(netG.parameters(), lr=lr, betas=(beta1, 0.999))# Training Loop# Lists to keep track of progressimg_list = [] # 存储生成器在噪声上生成的图像G_losses = []D_losses = []iters = 0 # 存储迭代的总次数print("Starting Training Loop...")# For each epochfor epoch in range(num_epochs):import timestart = time.time()# For each batch in the dataloaderfor i, data in enumerate(dataloader, 0): # 为批量加载的数据生成枚举值,从0开始############################# (1) Update D network: maximize log(D(x)) + log(1 - D(G(z)))############################# Train with all-real batchnetD.zero_grad() # 每批数据训练前,清除判别器参数的梯度# Format batchreal_cpu = data[0].to(device)b_size = real_cpu.size(0)label = torch.full((b_size,), real_label, device=device)# Forward pass real batch through Doutput = netD(real_cpu).view(-1) # 将批量真实数据输入判别器,并将输出展开为1维数据,用于和label计算损失# Calculate loss on all-real batcherrD_real = criterion(output, label)# Calculate gradients for D in backward passerrD_real.backward() # 反向传播计算判别器参数的梯度,此时也会计算生成器参数的梯度D_x = output.mean().item() # 计算判别器基于批量真实数据的输出均值## Train with all-fake batch# Generate batch of latent vectorsnoise = torch.randn(b_size, nz, 1, 1, device=device)# Generate fake image batch with Gfake = netG(noise)label.fill_(fake_label)# Classify all fake batch with Doutput = netD(fake.detach()).view(-1) # 不计算生成器参数的梯度# Calculate D's loss on the all-fake batcherrD_fake = criterion(output, label)# Calculate the gradients for this batcherrD_fake.backward() # 累计判别器基于批量假数据的梯度D_G_z1 = output.mean().item() # 判别器基于噪声生成假数据的输出# Add the gradients from the all-real and all-fake batcheserrD = errD_real + errD_fake# Update DoptimizerD.step() # 更新判别器的参数############################# (2) Update G network: maximize log(D(G(z)))###########################netG.zero_grad() # 每批数据训练前,清除生成器参数的梯度label.fill_(real_label) # fake labels are real for generator cost,此处是训练生成器,所有输入判别器的数据都是通过生成器生成的,因此输出标签为真# Since we just updated D, perform another forward pass of all-fake batch through Doutput = netD(fake).view(-1)# Calculate G's loss based on this outputerrG = criterion(output, label)# Calculate gradients for GerrG.backward() # 计算生成器参数的梯度D_G_z2 = output.mean().item() # 计算判别器输出的均值,与D_G_z1之间相差一次参数更新# Update GoptimizerG.step() # 更新生成器参数# Output training statsif i % 50 == 0: # 每训练50个批量# 占位符:%d输出一个整数,%f输出一个浮点数
print('[%d/%d][%d/%d]\tLoss_D: %.4f\tLoss_G: %.4f\tD(x): %.4f\tD(G(z)): %.4f / %.4f'% (epoch, num_epochs, i, len(dataloader),errD.item(), errG.item(), D_x, D_G_z1, D_G_z2))# Save Losses for plotting laterG_losses.append(errG.item()) # 存储每个批量的生成器损失D_losses.append(errD.item()) # 存储每个批量的判别器损失# Check how the generator is doing by saving G's output on fixed_noiseif (iters % 20 == 0) or ((epoch == num_epochs-1) and (i == len(dataloader)-1)): # 如果迭代次数为20的整数倍,或者为最后一轮的最后一个批量with torch.no_grad():fake = netG(fixed_noise).detach().cpu() # 得到生成器生成的假数据,无需生成计算图# 将生成的假数据合成一个网格图像
img_list.append(vutils.make_grid(fake, padding=2, normalize=True))i = vutils.make_grid(fake, padding=2, normalize=True)fig = plt.figure(figsize=(8, 8))plt.imshow(np.transpose(i, (1, 2, 0)))plt.axis('off') # 关闭坐标轴plt.savefig("out/%d_%d.png" % (epoch, iters)) # 保存每个批量的图片plt.close(fig)iters += 1 # 每个批量训练结束后,将总迭代次数加1print('time:', time.time() - start) # 打印每一轮训练消耗的时间Starting Training Loop... [0/10][0/69] Loss_D: 1.6922 Loss_G: 10.4924 D(x): 0.6837 D(G(z)): 0.6499 / 0.0001 [0/10][50/69] Loss_D: 0.0341 Loss_G: 35.9770 D(x): 0.9844 D(G(z)): 0.0000 / 0.0000 time: 45.65119695663452 [1/10][0/69] Loss_D: 0.0003 Loss_G: 33.8338 D(x): 0.9997 D(G(z)): 0.0000 / 0.0000 [1/10][50/69] Loss_D: 1.9597 Loss_G: 5.1042 D(x): 0.4813 D(G(z)): 0.0540 / 0.0197 time: 34.60388779640198 [2/10][0/69] Loss_D: 1.7999 Loss_G: 4.8677 D(x): 0.5162 D(G(z)): 0.1226 / 0.0610 [2/10][50/69] Loss_D: 1.0036 Loss_G: 6.6382 D(x): 0.4950 D(G(z)): 0.0013 / 0.0036 time: 34.82605242729187 [3/10][0/69] Loss_D: 0.9899 Loss_G: 0.9510 D(x): 0.5255 D(G(z)): 0.0657 / 0.4808 [3/10][50/69] Loss_D: 0.8487 Loss_G: 8.4878 D(x): 0.8906 D(G(z)): 0.4741 / 0.0006 time: 34.656062841415405 [4/10][0/69] Loss_D: 0.6986 Loss_G: 10.3000 D(x): 0.9097 D(G(z)): 0.3872 / 0.0001 [4/10][50/69] Loss_D: 0.4653 Loss_G: 4.1558 D(x): 0.7023 D(G(z)): 0.0290 / 0.0211 time: 34.64480686187744 [5/10][0/69] Loss_D: 1.7700 Loss_G: 7.7769 D(x): 0.9840 D(G(z)): 0.7115 / 0.0040 [5/10][50/69] Loss_D: 0.4862 Loss_G: 3.7039 D(x): 0.7550 D(G(z)): 0.0594 / 0.0549 time: 34.73557090759277 [6/10][0/69] Loss_D: 1.1480 Loss_G: 7.8190 D(x): 0.8646 D(G(z)): 0.4626 / 0.0020 [6/10][50/69] Loss_D: 1.6766 Loss_G: 5.0127 D(x): 0.3481 D(G(z)): 0.0024 / 0.0230 time: 36.48115563392639 [7/10][0/69] Loss_D: 2.0191 Loss_G: 12.2408 D(x): 0.9676 D(G(z)): 0.7749 / 0.0000 [7/10][50/69] Loss_D: 0.7136 Loss_G: 2.0795 D(x): 0.6281 D(G(z)): 0.1049 / 0.1796 time: 35.35510182380676 [8/10][0/69] Loss_D: 2.1591 Loss_G: 2.8655 D(x): 0.2812 D(G(z)): 0.0124 / 0.1683 [8/10][50/69] Loss_D: 1.7478 Loss_G: 2.6480 D(x): 0.3129 D(G(z)): 0.0105 / 0.1575 time: 36.06704092025757 [9/10][0/69] Loss_D: 4.0272 Loss_G: 1.3274 D(x): 0.1171 D(G(z)): 0.0385 / 0.4230 [9/10][50/69] Loss_D: 0.5768 Loss_G: 3.1357 D(x): 0.8594 D(G(z)): 0.2893 / 0.0799 time: 35.28251338005066
绘制损失曲线
plt.figure(figsize=(10,5))plt.title("Generator and Discriminator Loss During Training")plt.plot(G_losses,label="G")plt.plot(D_losses,label="D")plt.xlabel("iterations")plt.ylabel("Loss")plt.legend()plt.show()
真假对比
# Grab a batch of real images from the dataloader# real_batch = next(iter(dataloader))# Plot the real imagesplt.figure(figsize=(15,15))plt.subplot(1,2,1)plt.axis("off")plt.title("Real Images")plt.imshow(np.transpose(vutils.make_grid(real_batch[0].to(device)[:64], padding=5, normalize=True).cpu(),(1,2,0)))# Plot the fake images from the last epochplt.subplot(1,2,2)plt.axis("off")plt.title("Fake Images")plt.imshow(np.transpose(img_list[-1],(1,2,0)))plt.show()














 802
802











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









