









0. 简介
相比于传统的回环检测方法,SC给激光回环带来了更多的可能性,这里我们将会对SC进行解析,也顺便为之前的两篇文章填坑了。LEGO-LOAM改进思路以及代码, SC-LEGO-LOAM 扩展以及深度解析。Scan Context 就包括空间描述子的定义方法和与之对应的匹配算法。并提供了高效的 bin 编码函数,同时这种编码对点云的密度和法向的变化不敏感。另外SC还保存点云的内部结构,并使用一种有效的两阶段匹配算法,相比于其他空间描述子而言性能更好。
1. Scan Context 论文相关
基于 Scan Context 的位置识别方案整体流程如下图所示:
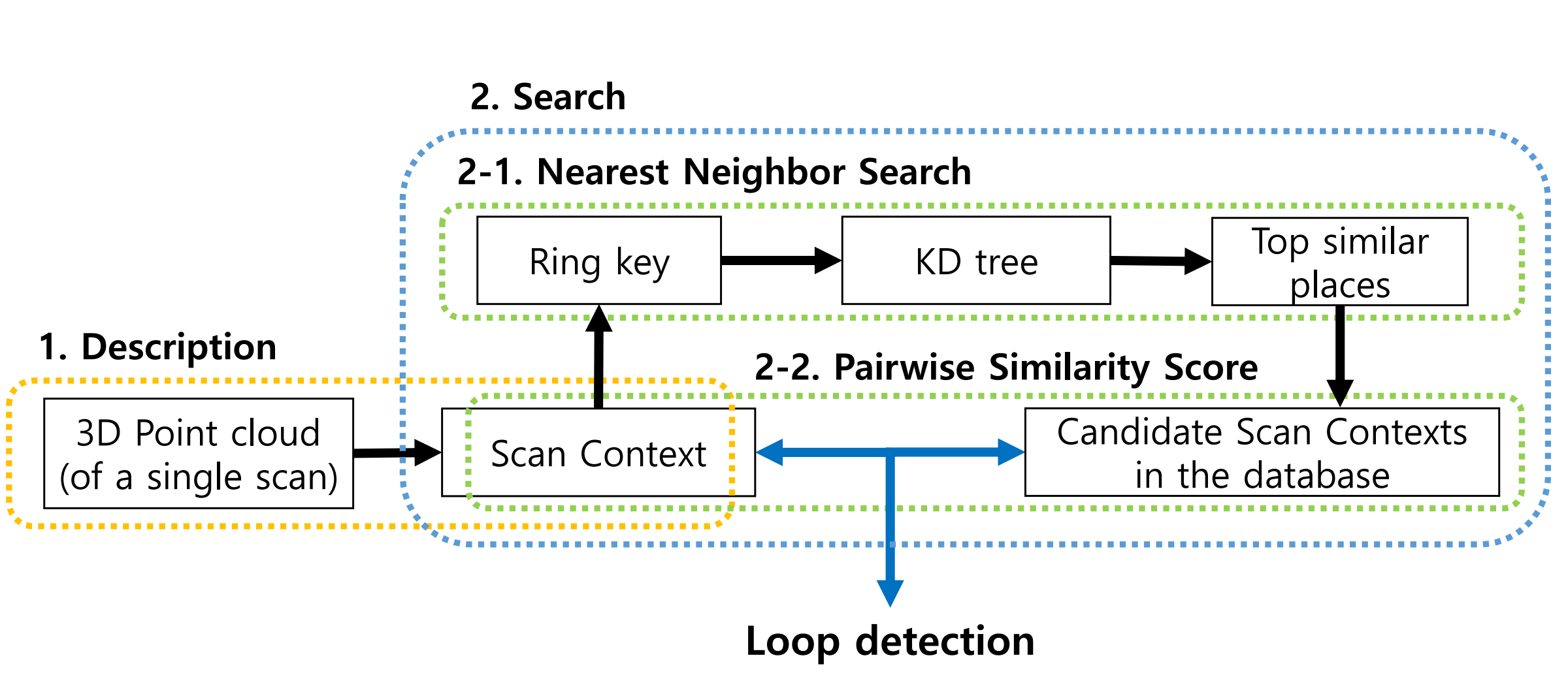
大概流程为:
- 对一帧点云先进行 SC(Scan Context)的计算
- 从该帧点云的 SC 中提取出一个 N 维的向量(和环数一致)用于在 KD 树中搜索相近的关键帧
- 将搜索得到的参考帧的 SC 和待匹配的当前帧进行比较,如果比较得分高于一定阈值则认为找到回环
1.1 Scan Context 计算
计算 SC 的主要过程为:
- 点云划分
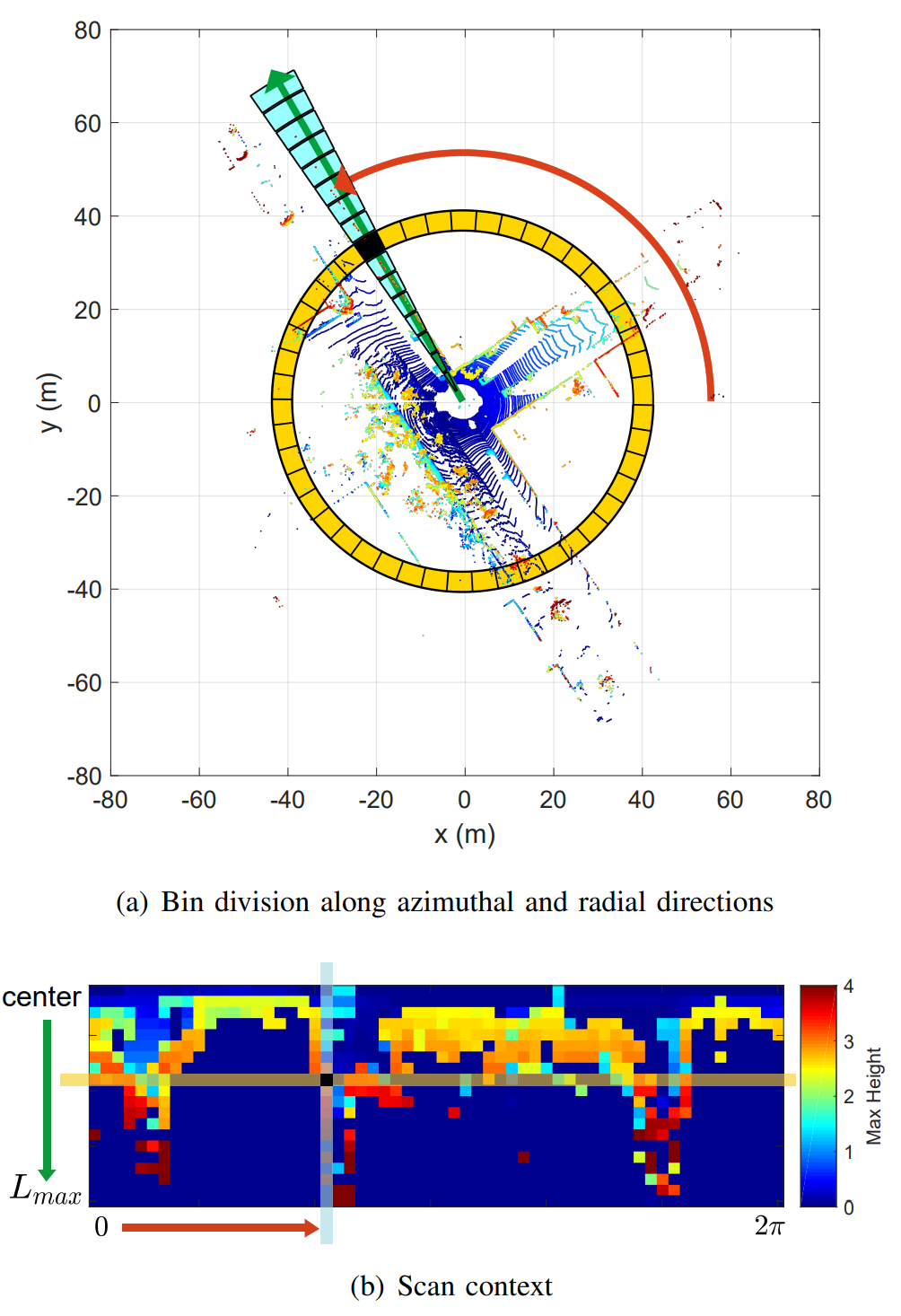
将一帧 3D 点云按照传感器坐标系中的方位角和半径均匀划分不同的 bin,如上图所示,从方位角上看点云被划分成 N s N_s Ns 个扇面(Sector),从半径反向看,点云被划分成 N r N_r Nr个环(Rings),每个扇面和环相交的部分为一个 bin。每个扇面和环的宽度(分辨率)可以从点云的最大检测距离和扇面/环数量计算得到。
从这种划分方式不难发现,距离较远的 Bin 相比于距离较近的 Bin 会稍微宽一点。这样划分的好处是可以自动对不同距离的点云密度进行动态调节。对于距离较近的地方通常点云密度会高一点,因此我们的 Bin 取窄一点,而相反,对于较远的地方,点云会比较稀疏。因此 Bin 取宽一点可以容纳更多点。
将每个环展开可以得到一个 N r × N s N_r\times N_s Nr×Ns 的二维图像,每个像素点 P i j P_{ij} Pij 是第 i i i 个环第 j j j 个扇面对应的 Bin,如上图 b 中所示。这就是 SC 的表现形式,因此下一步要做的就是每个 Bin 分配一个值 ϕ ( P i j ) \phi(P_{ij}) ϕ(Pij)。
- 给每个 Bin 分配一个数作为标识,SC 中用每个 Bin 的点中最大的高度作为该 Bin 的标识,对于没有任何点的 Bin 则用 0 作为标识。即:
ϕ
(
P
i
j
)
=
max
p
∈
P
i
j
z
(
p
)
\phi(P_{ij}) = \max_{\boldsymbol{p}\in P_{ij}}z(\boldsymbol{p})
ϕ(Pij)=maxp∈Pijz(p)
从上图中不难看到,虽然 SC 在空间上来看是一个圆,应该有旋转不变性。但我们按照 0 − 2 π 0 - 2\pi 0−2π 展开成 2D 图像后,SC 对 Lidar 的朝向就变得敏感了。朝向稍微偏几度可能整体图像就有比较大的平移从而不相似了,为了解决这个问题,作者对图像进行 N t r a n s = 8 N_{trans} = 8 Ntrans=8 次平移,通过这种方法来包含 Lidar 在不同朝向下的 SC。
1.2 N r N_r Nr(Rings)的快速搜索算法
目前主流方法中,在搜索相似帧中主要有三个主要流程:计算相似性、最近邻搜索、稀疏性优化。SC 方案中将计算相似得分和最近邻搜索结合成一步,有效降低了搜索时间。
由于,SC 中的距离计算相较于其他全局描述子较重,因此作者通过引入 Ring Key 提供了一个两阶段的层次搜索算法。Ring Key 是从 SC 中提取出来的一个旋转不变性的描述子。对 SC 中的每一行
r
r
r 使用一个环编码函数 (Ring encoding function)
ψ
\psi
ψ 来分配一个值作为标识。然后每个环的值组合成一个
N
r
N_r
Nr维的向量作为 Ring Key。
ψ
\psi
ψ 为:
ψ ( r i ) = ∣ ∣ r i ∣ ∣ 0 N s \psi(r_i) = \frac{||r_i||_0}{N_s} ψ(ri)=Ns∣∣ri∣∣0
简单来说,Ring Key 的计算方式,计算每个环(行)的密度(有值的像素除以总像素数),然后把不同环的密度组合在一起。显然这种方式提供了旋转不变性。因为无论 Lidar 怎么转只会造成图像平移,对每一行的密度不会有影响。
1.3 Scan Context 的相似性比较
给定两个 SC,需要有一个方式来判断这两个地方的相似性。设
I
q
,
I
c
I^q, I^c
Iq,Ic为待比较的两帧点云的 SC。论文中用的方法主要是按列进行比较,对两个 SC 中的每一对对应的列向量(Column Vector)计算出一个距离,对一个列的距离方式维计算两个列向量之间的 cos 距离,整个 SC 的距离用各列的距离之和来表示。具体计算如下所示:
d
(
I
q
,
I
c
)
=
1
N
s
∑
j
=
1
N
s
(
1
−
c
j
q
c
j
c
∣
∣
c
j
q
∣
∣
∣
∣
c
j
c
∣
∣
)
d(I^q, I^c) = \frac{1}{N_s}\sum_{j = 1}^{N_s}\left(1 - \frac{c^q_jc^c_j}{||c^q_j||||c^c_j||}\right)
d(Iq,Ic)=Ns1j=1∑Ns(1−∣∣cjq∣∣∣∣cjc∣∣cjqcjc)
这种距离计算方式对动态物体比较有效,因为考虑整个 Sector,而不是集中在单个 Bin 的影响。但同样的,这种距离方式对雷达的视角一致要求很高,哪怕在同一个位置雷达视角有一点点不同,可能计算出来的距离都会差别很大。为了解决这个问题,论文中使用的方式进行暴力匹配各个列组合的可能性(对其中一帧进行
2
π
N
s
\frac{2\pi}{N_s}
Ns2π 次小旋转进行匹配),找出距离最小的组合。
2. 基于SC的回环检测
回环检测的大致流程是对每一个关键帧,在检测器中加入所需的信息,然后进行一次检测,获得当前关键帧对应的历史关键帧索引。对于激光建图来说,所需的信息无外乎是当前帧的点云以及对应的位姿估计。
…详情请参照古月居
}
``
3 参考链接
https://zhuanlan.zhihu.com/p/393353116
https://blog.csdn.net/wyang9x/article/details/117446642
https://www.cnblogs.com/chenlinchong/p/13154874.html
















 529
529











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











