







 本文介绍了相机标定的基本原理,包括相机镜头的桶状和枕形畸变,以及张正友标定法的背景和优势。通过详细步骤展示了如何使用Python和OpenCV进行相机标定,包括标定板制作、多角度拍摄、特征点检测、参数计算和优化。实验结果展示了畸变矫正前后的对比,强调了标定板精度和图片大小对效率的影响。
本文介绍了相机标定的基本原理,包括相机镜头的桶状和枕形畸变,以及张正友标定法的背景和优势。通过详细步骤展示了如何使用Python和OpenCV进行相机标定,包括标定板制作、多角度拍摄、特征点检测、参数计算和优化。实验结果展示了畸变矫正前后的对比,强调了标定板精度和图片大小对效率的影响。
一、相机标定原理
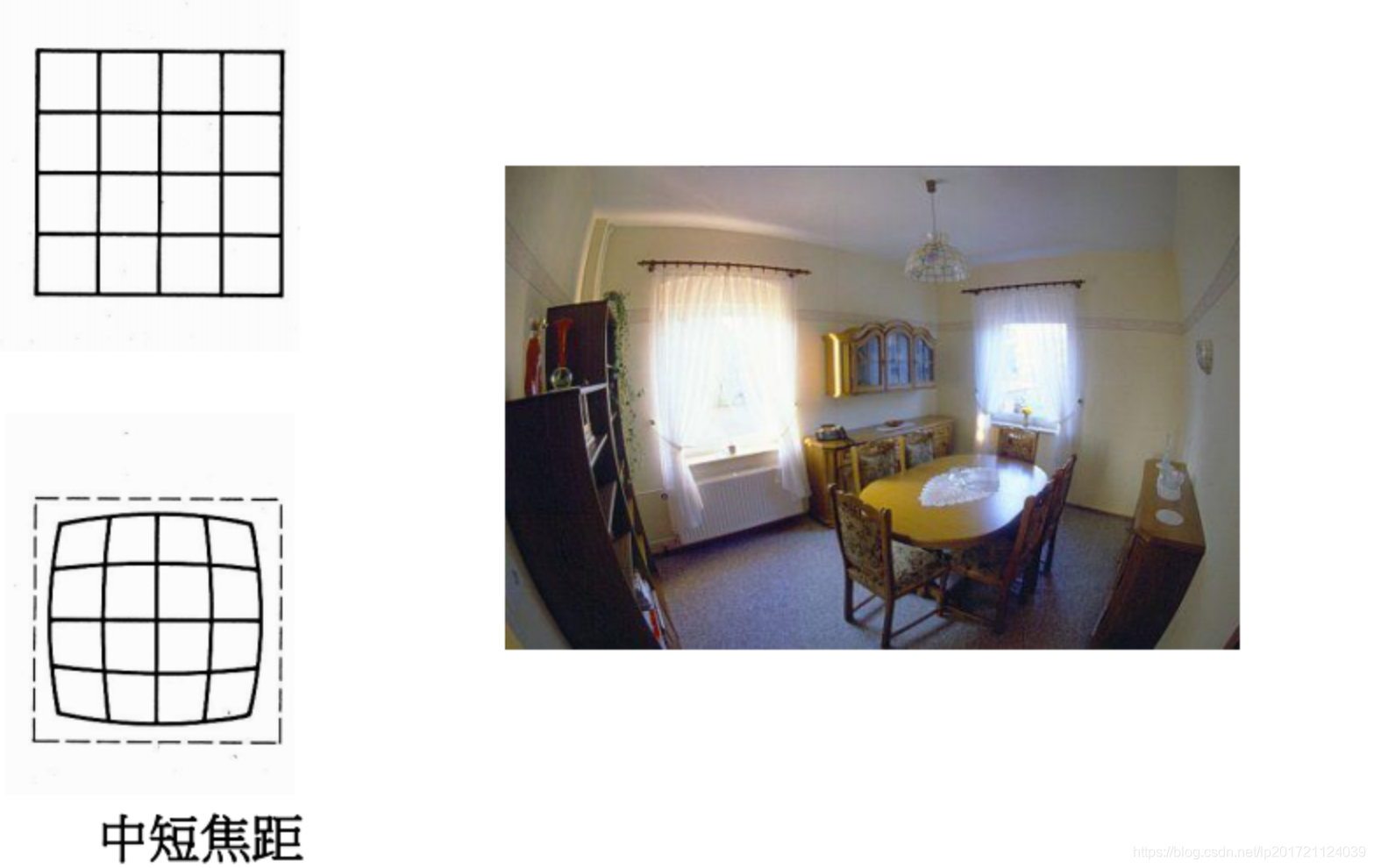
现实生活中的物体都处于三维世界坐标系中,当我们的照相机进行拍摄时,镜头看到的是三维世界坐标系,然而成像时却是二维图像坐标系。由于这种差异,导致镜头成像时的转换矩阵不同,同时还可能引起失真。
例如:桶状畸变
枕形畸变
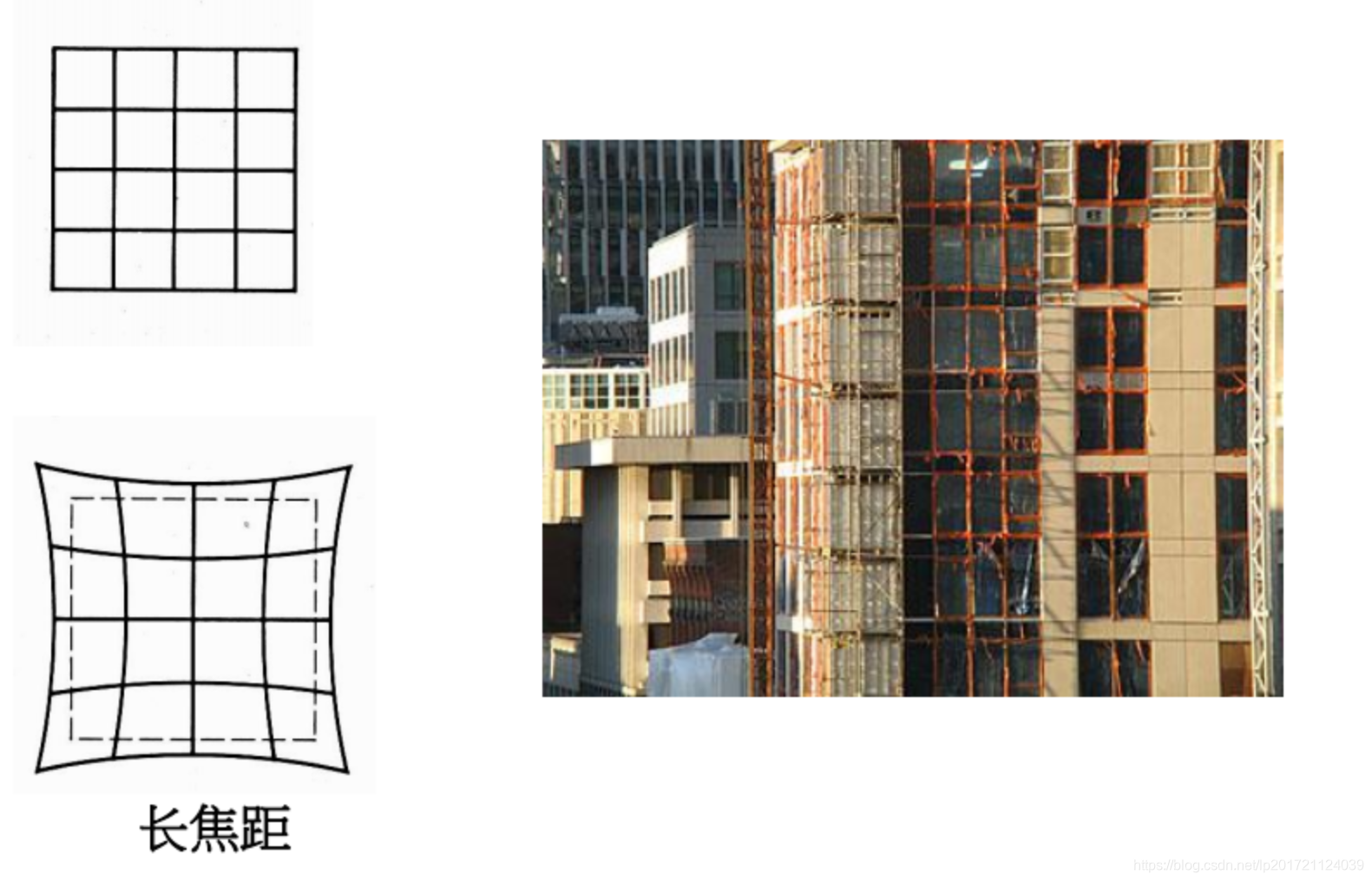
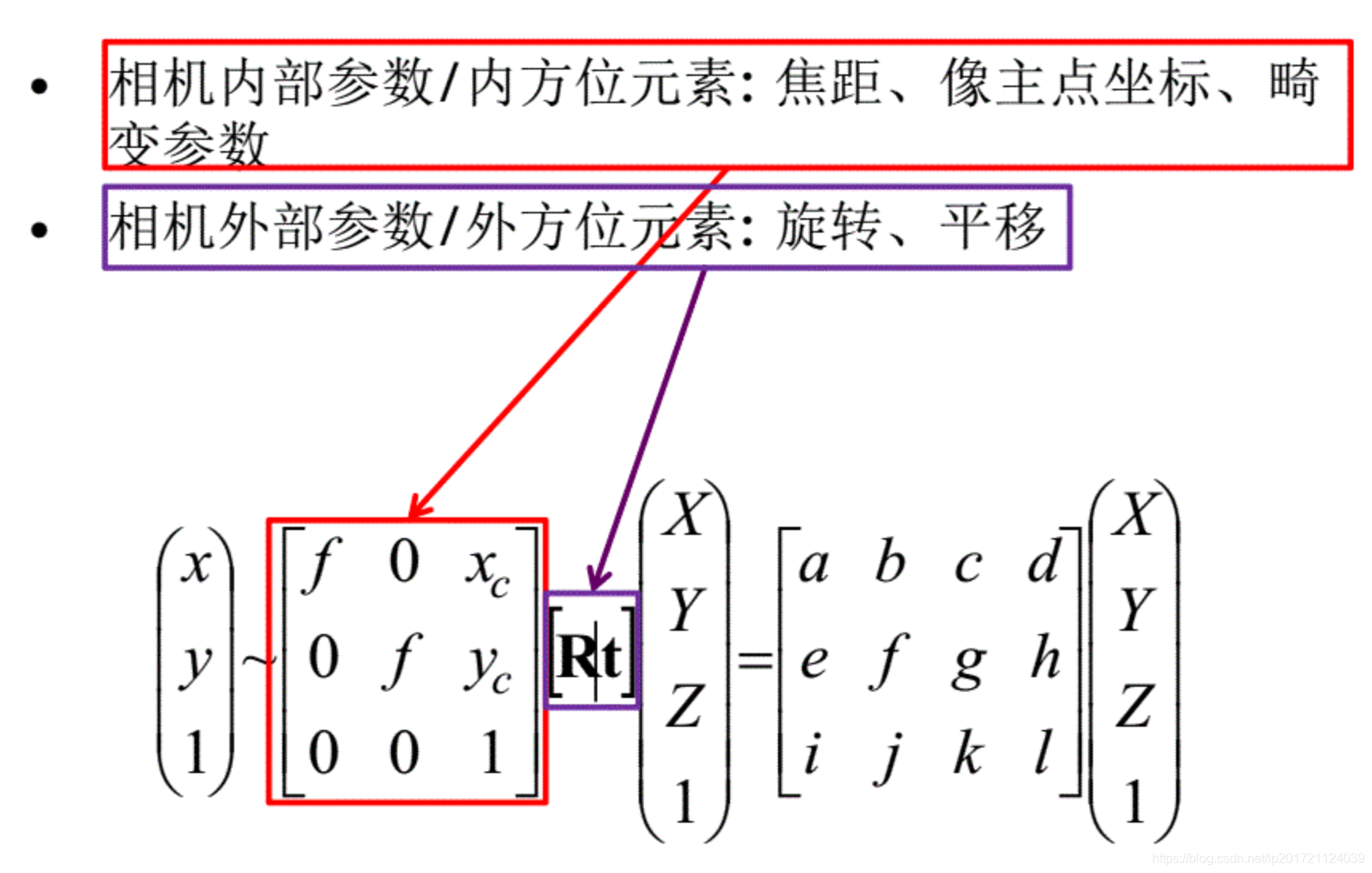
每个镜头的畸变程度各不相同,通过相机标定可以校正这种镜头畸变,通过标定近似地估算出转换矩阵和失真系数。为了估算,需要知道若干点的三维世界坐标系中的坐标和二维图像坐标系中的坐标,也就是拍摄棋盘的意义。通过相机标定,获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像。
二、张正友标定法简介
张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1794
1794

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









