






信捷XC系列标准程序,多段连续绝对定位控制,包含轴点动,回零,多段连续定位控制,整个项目结构清晰,注释完整,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手
标题:信捷XC系列标准程序:程序编写与项目分析
摘要:信捷XC系列标准程序是一种多段连续绝对定位控制方案,通过轴点动、回零和多段连续定位控制实现。本文将详细分析信捷XC系列标准程序的项目结构和编写过程,帮助读者深入了解该程序并学会正确编写和使用。
引言: 在工业自动化领域,信捷XC系列标准程序作为一种多段连续绝对定位控制方案,应用广泛。该程序以其清晰的项目结构和完整的注释著称,使开发人员能够轻松理解整个项目的编写过程。本文将通过对其项目结构和编写过程的分析,帮助读者深入了解信捷XC系列标准程序的原理与实践。
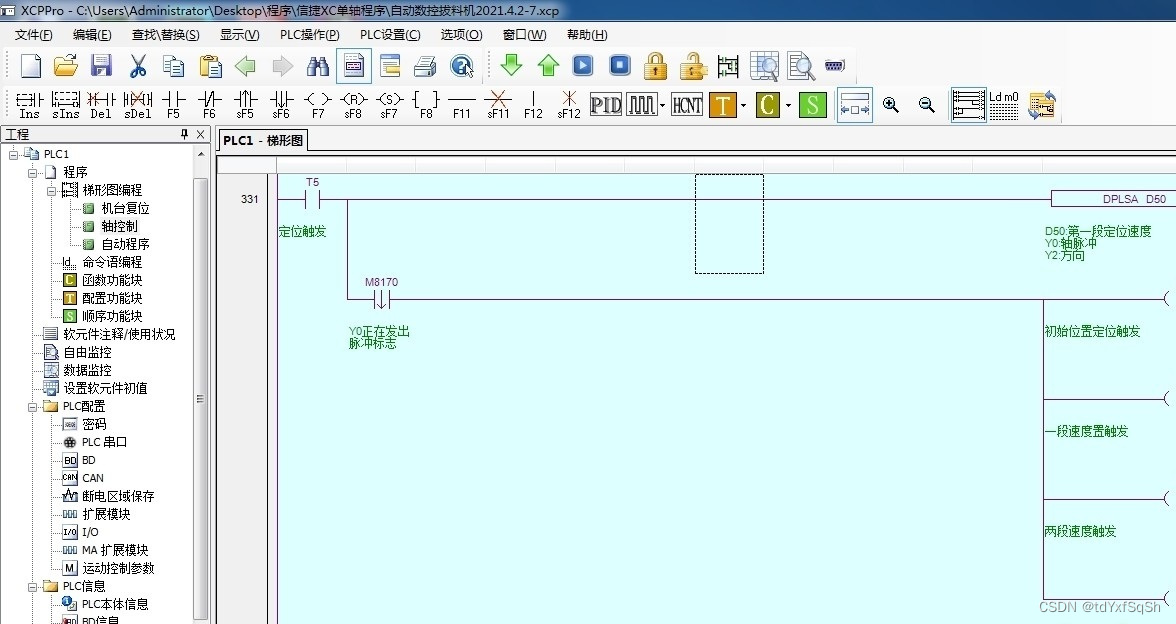
一、信捷XC系列标准程序概述 1.1 程序简介 信捷XC系列标准程序是一套用于多段连续绝对定位控制的软件方案。它包含了轴点动、回零和多段连续定位控制等功能。通过使用该程序,开发人员可以快速实现对各种工业自动化设备的精确定位控制。
1.2 项目结构 信捷XC系列标准程序具有清晰的项目结构,其模块化设计使得程序易于维护和扩展。主要包括以下几个模块: 1.2.1 轴点动控制模块:实现对单个轴的点动控制,可通过用户界面进行参数设置和控制操作。 1.2.2 回零控制模块:负责将轴移动到零点位置,通过传感器反馈实现精确定位。 1.2.3 多段连续定位控制模块:实现对多个轴的连续定位控制,通过算法优化提高运动效率和精度。
二、信捷XC系列标准程序编写过程 2.1 环境搭建 在开始编写信捷XC系列标准程序之前,需先搭建开发环境。这包括安装相应的开发软件和驱动程序,并配置硬件设备的连接。
2.2 程序逻辑设计 在程序编写过程中,需先进行逻辑设计。根据实际需求,确定各个模块之间的调用关系和数据传递方式。同时,需要考虑异常处理和错误处理机制,以保证程序的稳定性和可靠性。
2.3 代码实现 信捷XC系列标准程序的代码实现过程中,需要注意以下几个方面: 2.3.1 模块划分和函数封装:将各个功能模块划分成不同的函数,提高代码的可读性和重用性。 2.3.2 参数配置和输入验证:通过用户界面设置参数,并对输入数据进行验证,确保程序的安全性和准确性。 2.3.3 算法优化:针对多段连续定位控制模块,可以使用一些算法优化技术,提高系统的运动效率和精度。 2.3.4 注释和文档编写:为了使其他开发人员能够更好地理解和使用该程序,需编写详细的注释和文档,解释各个函数的功能和调用关系。
三、案例分析与实践 基于以上分析和编写流程,我们以一个实际案例来演示信捷XC系列标准程序的使用方法和效果。通过详细描述案例的背景、需求和实现过程,帮助读者更好地理解和运用该程序。
结论: 信捷XC系列标准程序以其清晰的项目结构和完整的注释,为开发人员提供了一种实现多段连续绝对定位控制的优秀方案。通过本文的分析和实践,读者不仅可以深入了解该程序的原理和实现过程,还能够快速掌握其编写方法和应用技巧。虽然本文只是对信捷XC系列标准程序的概述和分析,但相信读者已经能够从中获得关键的信息和思路,为自己在工业自动化领域的项目开发提供指导和帮助。
相关代码,程序地址:http://lanzouw.top/662717120788.html















 396
396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









