









采用运算符重载技术,设计一个名为"&"的运算符,使用该运算符可以计算出一个圆与一个三角形的公共部分的面积,并给出示例代码。已知数据:圆的圆心坐标和半径,三角形的三个顶点坐标。
今天无意中在贴吧发现了这样一道题,很显然难点在后半题。
于是开始考虑圆形和三角形的相交面积计算的通用方法。
我的思路:
三角形和圆形相交的情况比较多,按交点数就有0到6个,每种情况还有很多不同的细分情况要考虑。
将圆形所在的正方形,无限细分成NxN的小矩形(像素点?),然后一次判断每个矩形是否即在圆形内又在三角形内,则该矩形为相交部分。
统计所有的矩形,则可以求出相交部分的近似面积。
如果分割的足够细,则结果精度会比较高。
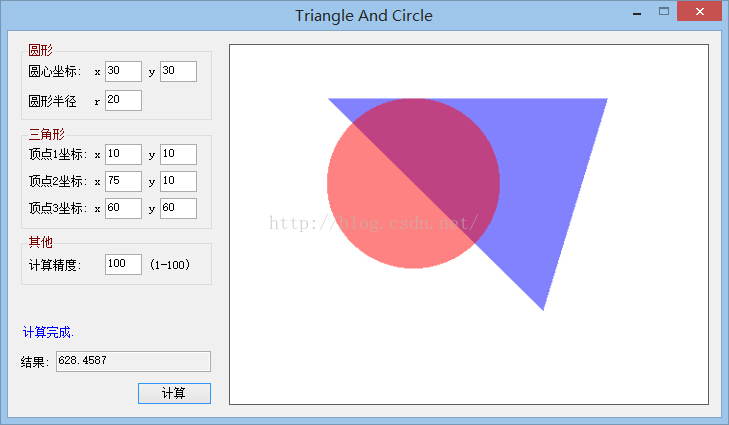
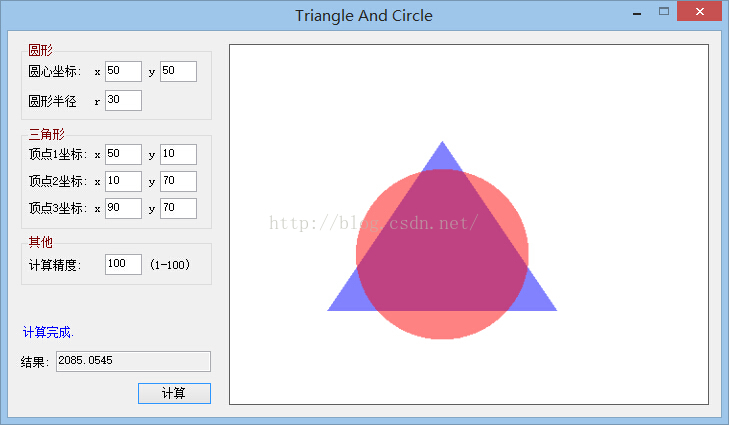
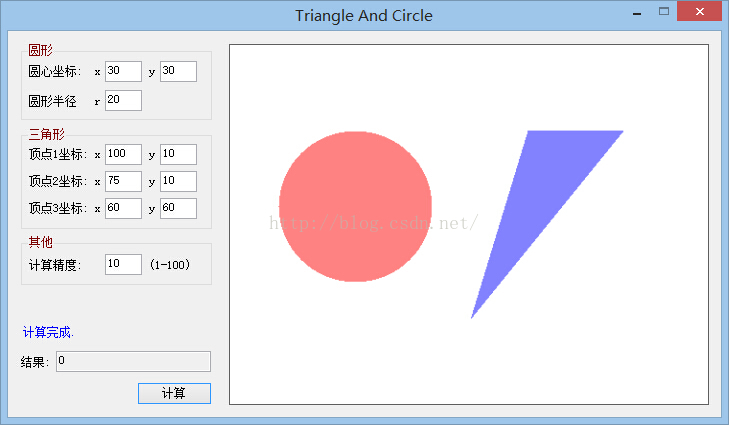
测试Demo截图:
以下是算法核心代码(不包含winform界面代码)
using System;
using System.Collections.Generic;
using System.Text;
using System.Drawing;
namespace CrossArea
{
/// <summary>
/// 面积计算
/// </summary>
public static class Area
{
/// <summary>
/// 计算交叉部分面积
/// </summary>
/// <param name="p">圆心坐标</param>
/// <param name="r">圆半径</param>
/// <param name="a">三角形A点坐标</param>
/// <param name="b">三角形B点坐标</param>
/// <param name="c">三角形C点坐标</param>
/// <param name="accuracy">计算精度</param>
/// <returns></returns>
public static double CrossArea(PointF p, float r, PointF a, PointF b, PointF c, float accuracy)
{
// 计算缩放精度
p = new PointF(p.X * accuracy, p.Y * accuracy);
r = r * accuracy;
a = new PointF(a.X * accuracy, a.Y * accuracy);
b = new PointF(b.X * accuracy, b.Y * accuracy);
c = new PointF(c.X * accuracy, c.Y * accuracy);
// 扫描起点
PointF p_start = new PointF(p.X - r, p.Y - r);
// 扫描终点
PointF p_end = new PointF(p.X + r, p.Y + r);
// 扫描统计
double count = 0;
// 扫描圆形所在的正方形内所有的点
for (int i = (int)p_start.X; i <= (int)p_end.X; i++)
{
for (int j = (int)p_start.Y; j <= (int)p_end.Y; j++)
{
Point pt = new Point(i,j);
// 如果扫描当前点在圆形和三角形内
if (IsInCircle(p, r, pt) && IsInTriangle(a, b, c, pt))
{
count++;
}
}
}
// 计算结果
double answer = count / (accuracy * accuracy);
return answer;
}
/// <summary>
/// 计算点到点的距离
/// </summary>
/// <param name="point1">点1</param>
/// <param name="point2">点2</param>
/// <returns>距离</returns>
public static double LengthFromPointToPoint(PointF point1, PointF point2)
{
return Math.Sqrt(Math.Pow(point1.X - point2.X, 2) + Math.Pow(point1.Y - point2.Y, 2));
}
/// <summary>
/// 点T是否在圆P内
/// </summary>
/// <param name="p">圆心坐标</param>
/// <param name="r">圆形半径</param>
/// <param name="t">点T</param>
/// <returns></returns>
public static bool IsInCircle(PointF p, float r, PointF t)
{
float length = (float)LengthFromPointToPoint(p, t);
if (length <= r)
return true;
else
return false;
}
/// <summary>
/// 点T是否在三角形内
/// </summary>
/// <param name="a">三角形A点坐标</param>
/// <param name="b">三角形B点坐标</param>
/// <param name="c">三角形C点坐标</param>
/// <param name="t">点T</param>
/// <returns></returns>
public static bool IsInTriangle(PointF a, PointF b, PointF c, PointF t)
{
bool temp1 = IsInIntercept(a, b, c, t);
bool temp2 = IsInIntercept(a, c, b, t);
bool temp3 = IsInIntercept(b, c, a, t);
if (temp1 && temp2 && temp3) return true;
else return false;
}
/// <summary>
/// 点T是否在线AB和C的截距范围内
/// </summary>
/// <param name="a">线端点A</param>
/// <param name="b">线端点B</param>
/// <param name="c">三角形的另一个点C</param>
/// <param name="t">点T</param>
/// <returns></returns>
public static bool IsInIntercept(PointF a, PointF b, PointF c, PointF t)
{
// AB延长线在Y轴上的截点,AB过C和T平行线在坐标轴上的截点
float p1, p2, pt;
// 斜率不存在时
if (a.X == b.X)
{
p1 = a.X;
p2 = c.X;
pt = t.X;
}
else
{
// 斜率为0时
if (a.Y == b.Y)
{
p1 = a.Y;
p2 = c.Y;
pt = t.Y;
}
// 斜率不为0时
else
{
// 斜率
float k = (a.Y - b.Y) / (a.X - b.X);
float bb = a.Y - k * a.X;
// Y轴的截距
p1 = bb;
p2 = c.Y - k * c.X;
pt = t.Y - k * t.X;
}
}
if ((pt <= p2 && pt >= p1) || (pt <= p1 && pt >= p2)) return true;
else return false;
}
}
}















 2612
2612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











