







出于学习目的,将AD9164英文数据手册翻译为中文数据手册,分享给需要的小伙伴。
水平有限,烦请谅解。如翻译有误,请留言,笔者将尽快更正,谢谢~
有需要文档版资源的朋友,详见:TEC控制器ADN8835中文参考手册资源-CSDN文库
背景知识:
TEC是一个利用塞贝克效应来加热和制冷的半导体P-N结器件。当在TEC两端加直流偏置电流时,TEC的一端就会加热,而另一端就要制冷。发热的一端通常被称为“热端”,制冷的一端被称为“冷端”。如果把TEC两端的偏置电流反向,则热端变为冷端,冷端变为热端。TEC转移的热量与通过TEC的电流有关。电流越大,转移的热量越多,但并非简单的线性关系。因此,目标物体的温度可以通过调节流过TEC两端电流的大小和方向来控制。
注意:TEC和TEC控制器不是一个东西
特征
- 高效单电感架构
- 集成低等效电阻(RDSON)用于TEC控制器
- TEC电压和电流运行监测
- 不需要外部感应电阻器
- 独立的TEC加热和冷却电流限制设置
- 可编程最大TEC电压
- 2.0 MHz(典型)PWM驱动器开关频率
- 外部同步
- 集成两个零偏移、轨对轨斩波放大器
- 兼容NTC或RTD热传感器(NTC温度传感器是一种热敏电阻、探头,其原理为:电阻值随着温度上升而迅速下降。其通常由2或3种金属氧化物组成, 混合在类似流体的粘土中,并在高温炉内锻烧成致密的烧结陶瓷。实际尺寸十分灵活,它们可小至0.010英寸或很小的直径。最大尺寸几乎没有限制,但通常适用半英寸以下。RTD(电阻温度探测器)是一种传感器,其电阻随温度的变化而变化。其电阻随传感器温度升高而增大。电阻与温度的关系是众所周知的,并且可随着时间的推移而重复。RTD 是一种无源设备。它不会单独产生输出。可使用外部电子设备来测量传感器电阻,方法是使小电流通过传感器,以产生电压。通常是 1 mA 或更低的测量电流,最大 5 mA,没有自热风险。)
- 2.50 V参考输出,精度为1%
- 温度锁定指示器
- 36引脚,6毫米×6毫米LFCSP封装
应用场景
TEC温度控制、光学模块、光纤放大器、光网络系统、需要TEC温度控制的仪器
 |
概述
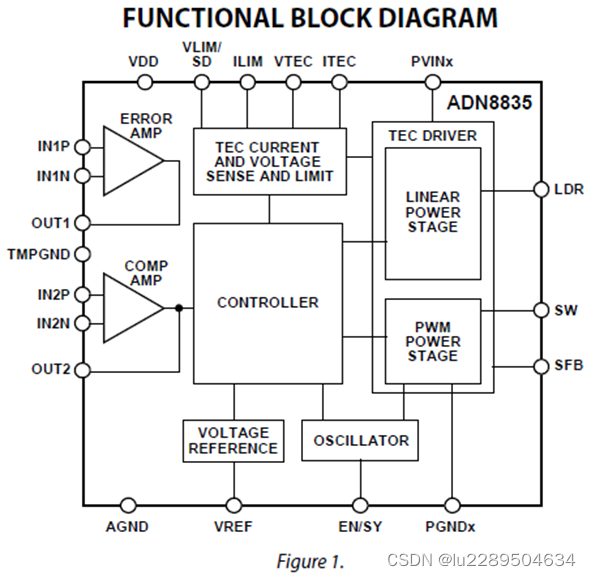
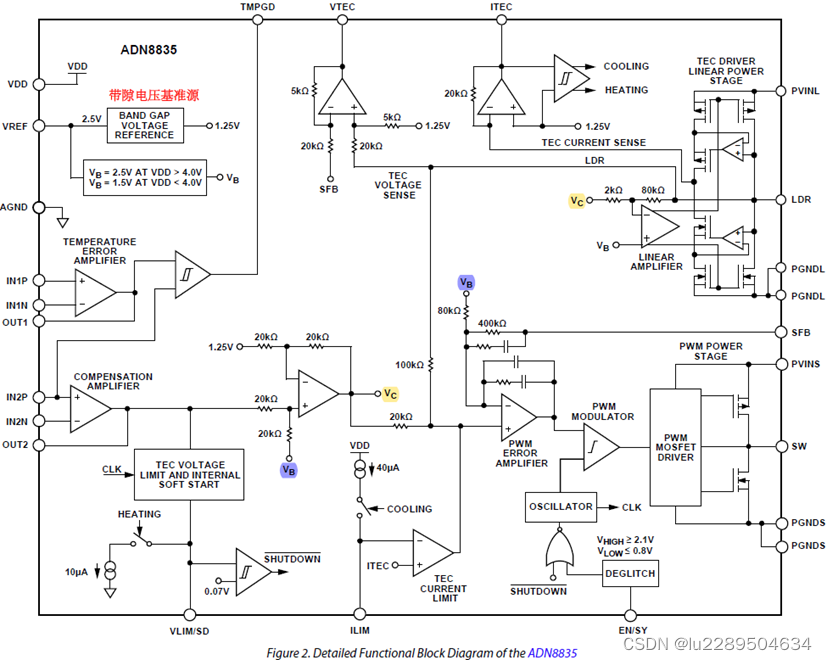
ADN8835是一款高集成度的单芯片TEC控制器。它包括线性电压调节模块(power stage)、脉冲宽度调制(PWM) 电压调节模块和两个零漂移、轨到轨斩波放大器。线性控制器和PWM驱动器用于控制H桥配置中的内部功率MOSFET。通过测量热传感器反馈电压,并使用集成的运算放大器作为比例-积分-微分(PID)补偿器来调理信号,ADN8835通过TEC驱动电流,将连接至TEC模块的激光二极管或无源组件的温度稳定到编程的目标温度。
ADN8835支持负温度系数(NTC)热敏电阻以及正温度系数(PTC)电阻温度检测器(RTD)。目标温度采用模拟电压的形式设置,其可来源于数模转换器(DAC)或外部电阻分压器。
ADN8835温度控制环路利用内置零漂移斩波放大器通过PID补偿方式实现稳定。内部2.50 V基准电压具备1%的精确输出能力,提供热敏电阻温度检测电桥和分压器网络偏置,从而在加热和冷却模式下对最大TEC电流和电压限值进行编程。它利用零漂移斩波放大器,通过自主模拟温度控制环路可维持出色的长期温度稳定性。
原理
ADN8835是一款单芯片TEC控制器,用于设置和稳定TEC温度。施加到ADN8835输入端的电压对应于TEC所连接目标物体的温度设定点。ADN8835控制内部FET H桥,从而通过TEC馈送电流的方向,可以是正的(用于冷却模式),将热量从TEC所连接物体中泵出,或者是负的(用于加热模式)将热量泵入TEC所连接物体。
温度通过附着在目标物体上的温度传感器测量,感测到的温度(电压)反馈给ADN8835,以完成TEC的闭合热控制回路。为了获得最佳的整体稳定性,请将热传感器连接到TEC附近。在大多数激光二极管模块中,TEC和NTC热敏电阻已经集成在同一封装中,以调节激光二极管的温度。
TEC以H桥配置的方式差分驱动。为了提供良好的功率效率和过零质量,H桥只有一侧使用PWM驱动器。只需要一个电感和一个电容就可以滤除开关频率。H桥的另一侧使用线性输出,而不需要任何附加电路。这种专业配置允许ADN8835提供>90%的效率。对于大多数应用,1μH电感器、10μF电容器和2.0 MHz的开关频率保证了TEC即便在最坏情况下的输出电压纹波仍低于1%以下。
通过使用VLIM/SD和ILIM引脚来设置TEC两端的最大电压和流过TEC的最大电流。最大冷却和加热电流可以独立设置,即允许不对称的加热和冷却限制。有关更多详细信息,请参阅“最大TEC电压限制”部分和“最大TEC电流限制”部分。
模拟PID控制
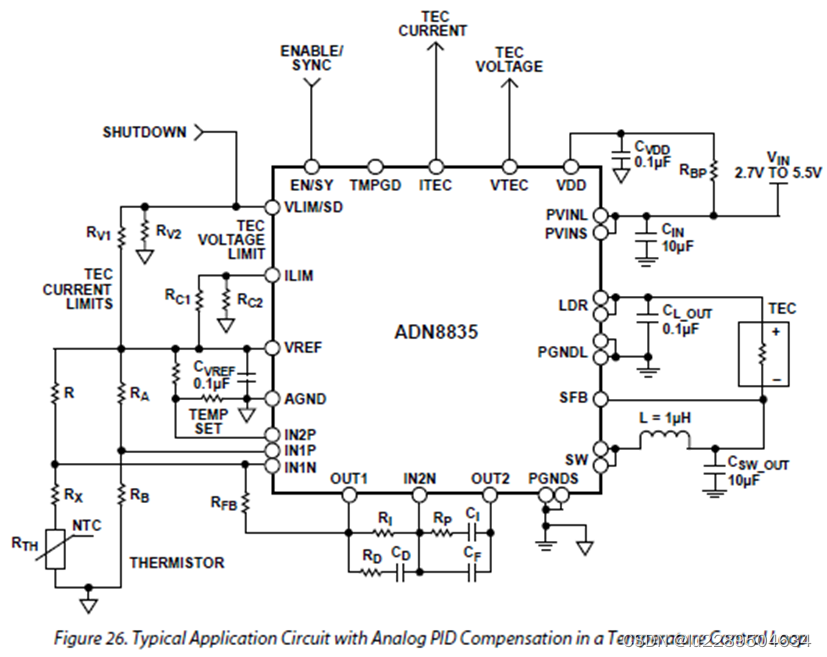
ADN8835集成了两个自校正、自动调零放大器(斩波器1和斩波器2)。斩波器1放大器接收温度传感器输入,并转换或调节为线性电压输出。OUT1电压与物体温度成比例。OUT1电压送至补偿放大器(斩波器2),并与温度设定点电压进行比较,从而产生与差值成比例的误差电压。对于自主模拟温度控制(模拟PID),斩波器2可以实现如图26所示的PID网络,以配置热回路的整体稳定性和响应。调整PID网络可优化TEC控制回路的阶跃响应。调整过程即为在稳定时间和最大电流振铃之间折中的过程。要调整补偿网络,请参阅PID补偿放大器(斩波器2)一节。
数字PID控制
ADN8835也可以配置为在软件控制的PID回路(数字PID)中使用。在这种情况下,斩波器1可以不使用,也可以配置为放大器,用于放大输入的热敏电阻测量温度(电压信号)。斩波器1的输出引脚可端接ADC,用于采集放大后的温度值(电压信号)。有关更多信息,请参阅热敏电阻放大器(斩波器1)一节。如果斩波器1未使用,将IN1N和IN1P连接到AGND。
斩波器2放大器用作外部DAC的缓冲器,用于控制温度设定点。将DAC连接到IN2P,并将IN2N和OUT2引脚短接在一起。有关如何为数字PID控制配置ADN8835外部电路的概述,请参见图27。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1125
1125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









