







三维空间的右手笛卡尔坐标如图1所示
pitch是围绕X轴旋转,也叫做俯仰角,如图2所示。
yaw是围绕Y轴旋转,也叫偏航角,如图3所示。
roll是围绕Z轴旋转,也叫翻滚角,如图4所示。
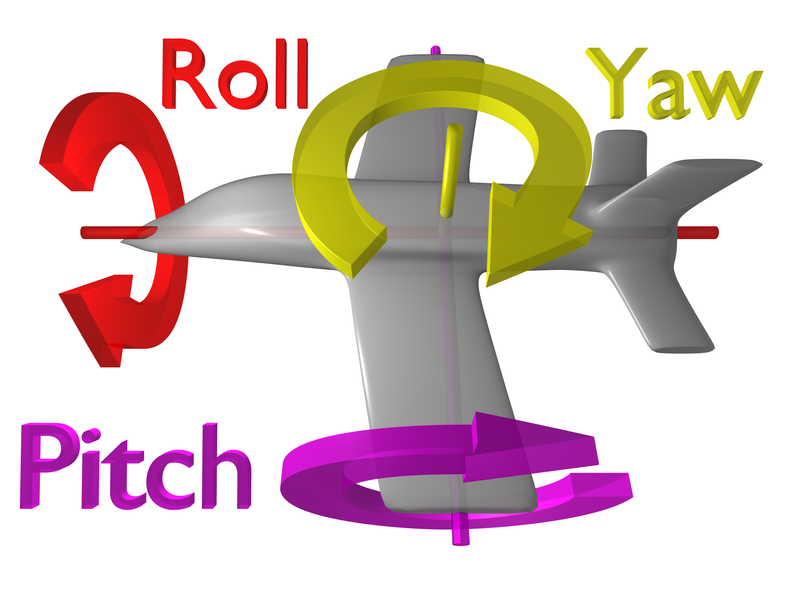
图1
pitch():俯仰,将物体绕X轴旋转(localRotationX)

图2
yaw():航向,将物体绕Y轴旋转(localRotationY)
图3
roll():横滚,将物体绕Z轴旋转(localRotationZ)

图4















 931
931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









