









相关:
SIFT原理与源码解析
SURF原理与源码解析
ORB原理与源码解析
FAST原理与源码解析
BRIEF描述子原理与源码解析
Harris原理与源码解析
转载请注明出处:http://blog.csdn.net/luoshixian099/article/details/49174869
PCA-SIFT是对传统SIFT算法的改进,由Yan Ke等人在《PCA-SIFT: A More Distinctive Representation for Local Image Descriptors》中提出,论文中采用PCA(Principal Component Analysis)把SIFT特征描述子从128维降到了20维,优化了描述子占用的内存,同时提高了匹配的准确性。
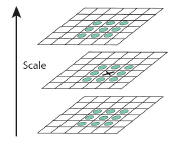
复习SIFT原理步骤:
1.构造DOG尺度空间 2.在各尺度上定位关键点 3.为关键点分配方向角 4.形成特征描述子 。
由于PCA-SIFT仅与SIFT第四步不同,1,2,3步骤详细过程请参考之前的文章SIFT原理。
步骤4:首先根据特征点所在尺度,确定一个特征点邻域(邻域大小与特征点所在尺度有关),分成4×4个子区域并旋转到主方向的位置,在每一子区域上统计梯度方向直方图(幅值采用采用高斯加权函数 ,360度范围被等分成8个方向),这样联合4×4个子区域统计信息就构成了一个特征描述子,特征描述子信息为4×4×8=128维。
—–PCA-SIFT原理步骤———————————————————————————————————–
1,2,3步骤与SIFT原理的相同,第四步(PCA):
(1)对特征点确定一个大小为41×41的邻域,旋转这个邻域到主方向;
(2)计算邻域内像素点的水平梯度与垂直梯度,这样每个特征点确定了一个大小为39×39×2=3042维的特征描述子;
(3)原论文中对同一类图像集中采集了21000个特征点,这样够成了一个原始特征矩阵M,矩阵大小3042×21000,计算矩阵的协方差矩阵N;
(4)计算协方差矩阵N的特征向量,根据特征根的大小排序,选择对应的前n个特征向量(论文中采用n=20),构成投影矩阵T;
(5)对新的特征描述子向量,乘以投影矩阵T,得到3042维降到n维的特征向量;
实际上,步骤(3),(4)是在之前计算好,即投影矩阵是通过同一类图像集采用PCA原理提前计算出。从图像中特征点计算得到3042维的特征描述子时,只需要与投影矩阵相乘,即可达到降维。关于投影矩阵的n的选择,可以根据需要固定n的值,也可根据协方差矩阵的特征值能量值百分比,自动确定n的大小。论文中采用n=20效果最佳。
.—————————————————————————————————————————————–
补充知识:
PCA(Principal Component Analysis)即主成分分析,也被称为KL变换或者Hotelling变换,数据的变换可以达到分类或者压缩数据的作用,PCA-SIFT是对SIFT描述子数据进行了压缩。首先收集数据所有特征(成分),通过变换的数据,观察数据的重要成分进行分类,也可以抛弃不重要的成分,减少或者压缩数据。如同,想表达某一种物体,而物体有很多个属性,通过变换数据,可以观察到每个属性的重要性,从而可以选择几种重要的属性去描述这一种物体,就到达了压缩数据的作用。
1 . 假如我们取到了有m个样本,每个样本有n个属性(行向量表示),则组成的数据矩阵
MY=(Y1,Y2,Y3,...Ym)
,其中
Y1
=(y1,1,y1,2,y1,3,...y1,n)T
;
则数据矩阵
MY
的每一列表示某一种属性的m个测量值;
用随机变量
Xi
表示矩阵的列向量,定义
X=(X1,X2,X3,....Xn)T
;
2 . 计算协方差矩阵:即每两个随机变量之间的协方差构成的矩阵
CY
;
其中 ci,j=cov(Xi,Xj)=E[(xi−ui)(xj−uj)] , ui,uj 表示随机变量 Xi,Xj 的期望.
写成矩阵的形式: CX=1m[(X−E(X))T(X−E(X)]
协方差矩阵元素值表示两个随机变量的线性相关性,通过计算协方差可以确定两个数据集合之间是否有关系。协方差值的取值范围从0开始,0表示线性无关到反应依赖关系强烈的正值或者负值。注意,协方差只能衡量随机变量之间的线性关系,这也PCA的局限性。通过观察为0的值可以突出有利于分类的不相关特征。由协方差矩阵的定义,可知协方差矩阵是对称矩阵,而且对角线元素表示对应特征的方差。
3 . 计算协方差矩阵的特征值与特征向量
PCA通过即找到变换矩阵
W
(也称为投影矩阵),使得
根据协方差矩阵的定义:
CZ=1m[(Z−E(Z))T(Z−E(Z)]
,替换
Z=XWT
和
ZT=WXT
=1m[W(X−E(X))T(X−E(x))W]
=WCXWT
即变换矩阵W由矩阵X的特征向量作为行向量构成;即求解矩阵X的对角化过程。
先求得矩阵X的特征值,特征值按大小排序,并求得特征值对应的特征向量构成变换矩阵W.
4 . 较大的特征值,表明此特征范围较大,方差也越大,容易区分。通常在压缩数据中,采用前几个较大的特征值对应的特征向量,构成变换矩阵。通过 Z=XWT 获得新特征,以缩减新特征对应的维数,且新特征是线性无关的。
5 . 有时为了从压缩后的数据重构原数据,被称为逆变换, X=ZW ,可以重构回原始数据特征。
/*
data: 为原始数据矩阵
mean: 各维度的均值,可以作为输入或者输出
flags:
CV_COVAR_ROWS 表示每行作为一个样本;
CV_COVAR_COLS 表示每列作为一个样本;
CV_COVAR_USE_AVG 表示mean矩阵作为输入;
...采用|操作联合
maxComponents: 需要的维数,必须小于样本数据的维数;
retainedVariance: 根据特征值能量百分比自动确定维数;
*/
class CV_EXPORTS PCA
{
public:
//! default constructor
PCA();
//! the constructor that performs PCA
PCA(InputArray data, InputArray mean, int flags, int maxComponents=0);
PCA(InputArray data, InputArray mean, int flags, double retainedVariance);
//! operator that performs PCA. The previously stored data, if any, is released
PCA& operator()(InputArray data, InputArray mean, int flags, int maxComponents=0);
PCA& computeVar(InputArray data, InputArray mean, int flags, double retainedVariance);
//! projects vector from the original space to the principal components subspace
Mat project(InputArray vec) const;//投影函数
//! projects vector from the original space to the principal components subspace
void project(InputArray vec, OutputArray result) const;//投影函数
//! reconstructs the original vector from the projection
Mat backProject(InputArray vec) const;//逆变换操作
//! reconstructs the original vector from the projection
void backProject(InputArray vec, OutputArray result) const;//逆变换操作
Mat eigenvectors; //!< eigenvectors of the covariation matrix 特征向量矩阵
Mat eigenvalues; // !< eigenvalues of the covariation matrix 特征值矩阵,单列矩阵
Mat mean; //!< mean value subtracted before the projection and added after the back projection 特征均值矩阵
};PCA& PCA::operator()(InputArray _data, InputArray __mean, int flags, int maxComponents)
{
Mat data = _data.getMat(), _mean = __mean.getMat();
int covar_flags = CV_COVAR_SCALE;//协方差元素取均值,即除以m , m为原始数据的维数
int i, len, in_count;
Size mean_sz;
CV_Assert( data.channels() == 1 );
if( flags & CV_PCA_DATA_AS_COL )//表示数据样本向量按列存放
{
len = data.rows; //表示数据的初始维数
in_count = data.cols; //表示数据的样本数
covar_flags |= CV_COVAR_COLS;
mean_sz = Size(1, len);//定义一个单列的矩阵尺寸
}
else
{
len = data.cols;
in_count = data.rows;
covar_flags |= CV_COVAR_ROWS;
mean_sz = Size(len, 1);
}
int count = std::min(len, in_count), out_count = count;
if( maxComponents > 0 ) //限制降维的数目
out_count = std::min(count, maxComponents);
// "scrambled" way to compute PCA (when cols(A)>rows(A)):
// B = A'A; B*x=b*x; C = AA'; C*y=c*y -> AA'*y=c*y -> A'A*(A'*y)=c*(A'*y) -> c = b, x=A'*y
if( len <= in_count )//样本数大于数据的维数,否则采用"scrmbled" way,协方差矩阵in_count×in_count
covar_flags |= CV_COVAR_NORMAL; //协方差矩阵大小为len×len
int ctype = std::max(CV_32F, data.depth());
mean.create( mean_sz, ctype );//均值单行或者单列的矩阵
Mat covar( count, count, ctype );
if( _mean.data ) //采用提取计算好的均值矩阵
{
CV_Assert( _mean.size() == mean_sz );
_mean.convertTo(mean, ctype);
}
/*计算协方差矩阵保存在covar*/
calcCovarMatrix( data, covar, mean, covar_flags, ctype );
eigen( covar, eigenvalues, eigenvectors );//计算对称协方差矩阵的特征值与特征向量
if( !(covar_flags & CV_COVAR_NORMAL) ) //“scrambled” 方法计算协方差矩阵
{
// CV_PCA_DATA_AS_ROW: cols(A)>rows(A). x=A'*y -> x'=y'*A
// CV_PCA_DATA_AS_COL: rows(A)>cols(A). x=A''*y -> x'=y'*A'
Mat tmp_data, tmp_mean = repeat(mean, data.rows/mean.rows, data.cols/mean.cols);
if( data.type() != ctype || tmp_mean.data == mean.data )
{
data.convertTo( tmp_data, ctype );
subtract( tmp_data, tmp_mean, tmp_data );
}
else
{
subtract( data, tmp_mean, tmp_mean );
tmp_data = tmp_mean;
}
Mat evects1(count, len, ctype);
gemm( eigenvectors, tmp_data, 1, Mat(), 0, evects1,
(flags & CV_PCA_DATA_AS_COL) ? CV_GEMM_B_T : 0);
eigenvectors = evects1;
// normalize eigenvectors
for( i = 0; i < out_count; i++ )
{
Mat vec = eigenvectors.row(i);
normalize(vec, vec);
}
}
if( count > out_count )
{
// use clone() to physically copy the data and thus deallocate the original matrices
eigenvalues = eigenvalues.rowRange(0,out_count).clone();//保存特征值与特征向量
eigenvectors = eigenvectors.rowRange(0,out_count).clone();//保存特征值与特征向量
}
return *this;
}void PCA::project(InputArray _data, OutputArray result) const
{
Mat data = _data.getMat();
CV_Assert( mean.data && eigenvectors.data &&
((mean.rows == 1 && mean.cols == data.cols) || (mean.cols == 1 && mean.rows == data.rows)));
Mat tmp_data, tmp_mean = repeat(mean, data.rows/mean.rows, data.cols/mean.cols); //扩展mean矩阵到_data大小,
int ctype = mean.type();
if( data.type() != ctype || tmp_mean.data == mean.data )
{
data.convertTo( tmp_data, ctype );
subtract( tmp_data, tmp_mean, tmp_data );// data-mean
}
else
{
subtract( data, tmp_mean, tmp_mean );
tmp_data = tmp_mean;
}
if( mean.rows == 1 )
gemm( tmp_data, eigenvectors, 1, Mat(), 0, result, GEMM_2_T );//输入矩阵乘以变换矩阵
else
gemm( eigenvectors, tmp_data, 1, Mat(), 0, result, 0 );
}void PCA::backProject(InputArray _data, OutputArray result) const //逆变换
{
Mat data = _data.getMat();
CV_Assert( mean.data && eigenvectors.data &&
((mean.rows == 1 && eigenvectors.rows == data.cols) ||
(mean.cols == 1 && eigenvectors.rows == data.rows)));
Mat tmp_data, tmp_mean;
data.convertTo(tmp_data, mean.type());
if( mean.rows == 1 )
{
tmp_mean = repeat(mean, data.rows, 1);
gemm( tmp_data, eigenvectors, 1, tmp_mean, 1, result, 0 );
}
else
{
tmp_mean = repeat(mean, 1, data.cols);
gemm( eigenvectors, tmp_data, 1, tmp_mean, 1, result, GEMM_1_T );
}
}参考:
PCA-SIFT: A More Distinctive Representation for Local Image Descriptors
http://blog.csdn.net/songzitea/article/details/18270457
http://www.360doc.com/content/14/0526/06/15831056_380900310.shtml















 6065
6065

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









