









 本文介绍了Harris角点检测的基本原理与实现方法,并详细解析了Harris角点响应函数的数学基础及其在OpenCV中的具体应用。
本文介绍了Harris角点检测的基本原理与实现方法,并详细解析了Harris角点响应函数的数学基础及其在OpenCV中的具体应用。
相关:SIFT原理及源码剖析
本文采用的是opencv2.4.3中的源码。
转载请注明出处:http://blog.csdn.net/luoshixian099/article/details/48244255
CSDN-勿在浮沙筑高台
Harris角点检测
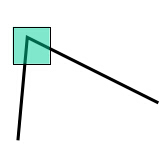
人眼对角点的识别通常是通过一个局部的小窗口内完成的,如果在各个方向上移动这个小窗口,窗口内的灰度发生了较大的变化,那么说明窗口内存在角点。
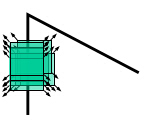
如果在各个方向移动,灰度几乎不变,说明是平坦区域;
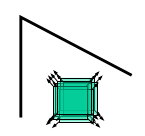
如果只沿着某一个方向移动,灰度几乎不变,说明是直线;
如果沿各个方向移动,灰度均发生变化,说明是角点。
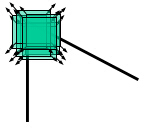
平坦区域 直线 角点
图像I(x,y),在点(x,y)处平移(u,v)后的自相似性,可以用灰度变化函数E(u,v)表示
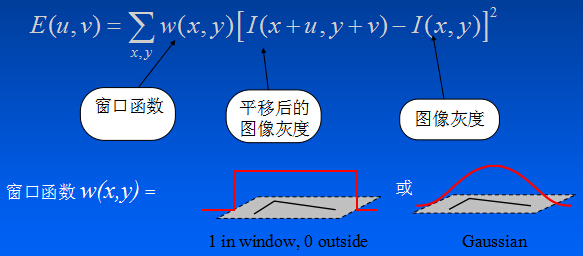

泰勒展开:
代入得到:

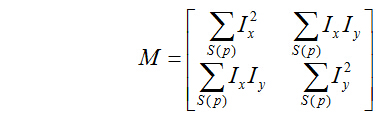
其中:

二次项函数本质上就是一个椭圆函数,椭圆的扁平率和尺寸是由矩阵M的两个特征值决定的。

矩阵M的两个特征值与图像中的角点,边缘,平坦区域的关系:

Harris定义角点响应函数即 ,即R=Det(M)-k*trace(M)*trace(M),k为经验常数0.04~0.06 。
,即R=Det(M)-k*trace(M)*trace(M),k为经验常数0.04~0.06 。
定义当R>threshold时且为局部极大值的点时,定义为角点。
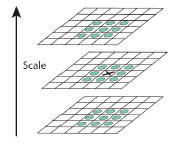
Harris角点检测算子对图像亮度和对比度具有部分不变性,且具有旋转不变性,但不具有尺度不变性。
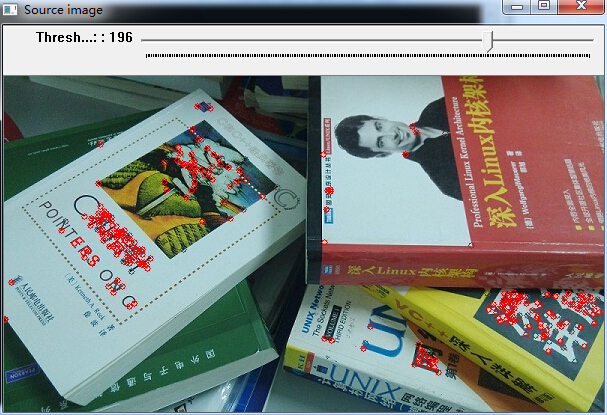
opencv中调用cornerHarris函数检测角点:
blockSize:为邻域大小,对每个像素,考虑blockSize×blockSize大小的邻域S(p),在邻域上计算图像的差分的相关矩阵;
ksize: 为Soble算子核尺寸,如果小于0,采用3×3的Scharr滤波器;
k:为角点响应函数中的经验常数(0.04~0.06);
int blockSize = 2;
int apertureSize =3;
double k = 0.04;
/// Detecting corners
cornerHarris( src_gray, dst, blockSize, apertureSize, k, BORDER_DEFAULT ); void cv::cornerHarris( InputArray _src, OutputArray _dst, int blockSize, int ksize, double k, int borderType )
{
Mat src = _src.getMat();
_dst.create( src.size(), CV_32F );
Mat dst = _dst.getMat();
cornerEigenValsVecs( src, dst, blockSize, ksize, HARRIS, k, borderType );//调用函数计算图像块的特征值和特征向量
}static void
cornerEigenValsVecs( const Mat& src, Mat& eigenv, int block_size,
int aperture_size, int op_type, double k=0.,
int borderType=BORDER_DEFAULT )
{
#ifdef HAVE_TEGRA_OPTIMIZATION
if (tegra::cornerEigenValsVecs(src, eigenv, block_size, aperture_size, op_type, k, borderType))
return;
#endif
int depth = src.depth();
double scale = (double)(1 << ((aperture_size > 0 ? aperture_size : 3) - 1)) * block_size;
if( aperture_size < 0 )
scale *= 2.;
if( depth == CV_8U )
scale *= 255.;
scale = 1./scale;
CV_Assert( src.type() == CV_8UC1 || src.type() == CV_32FC1 );
Mat Dx, Dy; //保存每个像素点的水平方向和垂直方向的一阶差分
if( aperture_size > 0 )//采用Sobel滤波器
{
Sobel( src, Dx, CV_32F, 1, 0, aperture_size, scale, 0, borderType );
Sobel( src, Dy, CV_32F, 0, 1, aperture_size, scale, 0, borderType );
}
else //采用3×3的Scharr滤波器,可以给出比3×3 Sobel滤波器更精确的结果
{
Scharr( src, Dx, CV_32F, 1, 0, scale, 0, borderType );
Scharr( src, Dy, CV_32F, 0, 1, scale, 0, borderType );
}
Size size = src.size();
Mat cov( size, CV_32FC3 );
int i, j;
for( i = 0; i < size.height; i++ )
{
float* cov_data = (float*)(cov.data + i*cov.step);
const float* dxdata = (const float*)(Dx.data + i*Dx.step);
const float* dydata = (const float*)(Dy.data + i*Dy.step);
for( j = 0; j < size.width; j++ )
{
float dx = dxdata[j];
float dy = dydata[j];
cov_data[j*3] = dx*dx; //第一个通道存dx*dx,即M矩阵左上角的元素
cov_data[j*3+1] = dx*dy;//第二个通道存dx*dy,即M矩阵左下角和右上角的元素
cov_data[j*3+2] = dy*dy;//第三个通道存dy*dy,即M矩阵右下角的元素
}
}
boxFilter(cov, cov, cov.depth(), Size(block_size, block_size), //计算邻域上的差分相关矩阵(block_size×block_size)
Point(-1,-1), false, borderType );
if( op_type == MINEIGENVAL ) //计算M矩阵的最小的特征值
calcMinEigenVal( cov, eigenv );
else if( op_type == HARRIS )//计算Harris角点响应函数R
calcHarris( cov, eigenv, k );
else if( op_type == EIGENVALSVECS )//计算图像块的特征值和特征向量
calcEigenValsVecs( cov, eigenv );
}
static void
calcHarris( const Mat& _cov, Mat& _dst, double k )
{
int i, j;
Size size = _cov.size();
if( _cov.isContinuous() && _dst.isContinuous() )
{
size.width *= size.height;
size.height = 1;
}
for( i = 0; i < size.height; i++ )
{
const float* cov = (const float*)(_cov.data + _cov.step*i);
float* dst = (float*)(_dst.data + _dst.step*i);
j = 0;
for( ; j < size.width; j++ )
{
float a = cov[j*3];
float b = cov[j*3+1];
float c = cov[j*3+2];
dst[j] = (float)(a*c - b*b - k*(a + c)*(a + c)); //计算每个像素对应角点响应函数R
}
}
}Shi-Tomasi角点检测
CV_EXPORTS_W void goodFeaturesToTrack( InputArray image, OutputArray corners,
int maxCorners, double qualityLevel, double minDistance,
InputArray mask=noArray(), int blockSize=3,
bool useHarrisDetector=false, double k=0.04 );void cv::goodFeaturesToTrack( InputArray _image, OutputArray _corners,
int maxCorners, double qualityLevel, double minDistance,
InputArray _mask, int blockSize,
bool useHarrisDetector, double harrisK )
{
Mat image = _image.getMat(), mask = _mask.getMat();
CV_Assert( qualityLevel > 0 && minDistance >= 0 && maxCorners >= 0 );
CV_Assert( mask.empty() || (mask.type() == CV_8UC1 && mask.size() == image.size()) );
Mat eig, tmp;
if( useHarrisDetector )
cornerHarris( image, eig, blockSize, 3, harrisK ); //采用Harris角点检测
else
cornerMinEigenVal( image, eig, blockSize, 3 ); //采用Harris改进算法,eig保存矩阵M较小的特征值。见下面算法实现
double maxVal = 0;
minMaxLoc( eig, 0, &maxVal, 0, 0, mask );//保存eig中最大的值maxVal
threshold( eig, eig, maxVal*qualityLevel, 0, THRESH_TOZERO );//阈值处理,小于maxVal*qualityLevel的像素值归为0。
dilate( eig, tmp, Mat());//膨胀,3×3的核,为了取局部极大值
Size imgsize = image.size();
vector<const float*> tmpCorners;
// collect list of pointers to features - put them into temporary image
for( int y = 1; y < imgsize.height - 1; y++ )
{
const float* eig_data = (const float*)eig.ptr(y);
const float* tmp_data = (const float*)tmp.ptr(y);
const uchar* mask_data = mask.data ? mask.ptr(y) : 0;
for( int x = 1; x < imgsize.width - 1; x++ )
{
float val = eig_data[x];
if( val != 0 && val == tmp_data[x] && (!mask_data || mask_data[x]) )//局部极大值
tmpCorners.push_back(eig_data + x);
}
}
sort( tmpCorners, greaterThanPtr<float>() ); //按值从大到小排序
vector<Point2f> corners;
size_t i, j, total = tmpCorners.size(), ncorners = 0;
/*
网格处理,即把图像划分成正方形网格,每个网格边长为容忍距离minDistance
以一个角点位置为中心,minDistance为半径的区域内部不允许出现第二个角点
*/
if(minDistance >= 1)
{
// Partition the image into larger grids
int w = image.cols;
int h = image.rows;
const int cell_size = cvRound(minDistance);//划分成网格,网格边长为容忍距离
const int grid_width = (w + cell_size - 1) / cell_size;
const int grid_height = (h + cell_size - 1) / cell_size;
std::vector<std::vector<Point2f> > grid(grid_width*grid_height);
minDistance *= minDistance;
for( i = 0; i < total; i++ ) //按从大到小的顺序,遍历所有角点
{
int ofs = (int)((const uchar*)tmpCorners[i] - eig.data);
int y = (int)(ofs / eig.step);
int x = (int)((ofs - y*eig.step)/sizeof(float));
bool good = true;
int x_cell = x / cell_size;
int y_cell = y / cell_size;
int x1 = x_cell - 1;
int y1 = y_cell - 1;
int x2 = x_cell + 1;
int y2 = y_cell + 1;
// boundary check
x1 = std::max(0, x1);
y1 = std::max(0, y1);
x2 = std::min(grid_width-1, x2);
y2 = std::min(grid_height-1, y2);
for( int yy = y1; yy <= y2; yy++ )//检测角点,minDistance半径邻域内,有没有其他角点出现
{
for( int xx = x1; xx <= x2; xx++ )
{
vector <Point2f> &m = grid[yy*grid_width + xx];
if( m.size() )
{
for(j = 0; j < m.size(); j++)
{
float dx = x - m[j].x;
float dy = y - m[j].y;
if( dx*dx + dy*dy < minDistance )//有其他角点,丢弃当前角点
{
good = false;
goto break_out;
}
}
}
}
}
break_out:
if(good)
{
// printf("%d: %d %d -> %d %d, %d, %d -- %d %d %d %d, %d %d, c=%d\n",
// i,x, y, x_cell, y_cell, (int)minDistance, cell_size,x1,y1,x2,y2, grid_width,grid_height,c);
grid[y_cell*grid_width + x_cell].push_back(Point2f((float)x, (float)y));
corners.push_back(Point2f((float)x, (float)y));//满足条件的存入corners
++ncorners;
if( maxCorners > 0 && (int)ncorners == maxCorners )
break;
}
}
}
else //不设置容忍距离
{
for( i = 0; i < total; i++ )
{
int ofs = (int)((const uchar*)tmpCorners[i] - eig.data);
int y = (int)(ofs / eig.step);
int x = (int)((ofs - y*eig.step)/sizeof(float));
corners.push_back(Point2f((float)x, (float)y));
++ncorners;
if( maxCorners > 0 && (int)ncorners == maxCorners )
break;
}
}
Mat(corners).convertTo(_corners, _corners.fixedType() ? _corners.type() : CV_32F);
}求矩阵M最小的特征值
static void
calcMinEigenVal( const Mat& _cov, Mat& _dst )
{
int i, j;
Size size = _cov.size();
if( _cov.isContinuous() && _dst.isContinuous() )
{
size.width *= size.height;
size.height = 1;
}
for( i = 0; i < size.height; i++ )//遍历所有像素点
{
const float* cov = (const float*)(_cov.data + _cov.step*i);
float* dst = (float*)(_dst.data + _dst.step*i);
j = 0;
for( ; j < size.width; j++ )
{
float a = cov[j*3]*0.5f;//cov[j*3]保存矩阵M左上角元素
float b = cov[j*3+1]; //cov[j*3+1]保存左下角和右上角元素
float c = cov[j*3+2]*0.5f;//cov[j*3+2]右下角元素
dst[j] = (float)((a + c) - std::sqrt((a - c)*(a - c) + b*b));//求最小特征值,一元二次方程求根公式
}
}
}参考:http://blog.csdn.net/xw20084898/article/details/21180729

















 643
643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









