






滑动窗口法
为了控制BA优化的规模,需要选择那些应该被优化的帧的位姿和地图点,orbslam2中采用的是一种共视图的结构,例如,仅优化与当前帧有20个以上共视路标点的关键帧。
不难想到滑动窗口分为两步:
1. 新增一个关键帧以及它观测到的路标点
2. 删除旧的关键帧,如果旧的关键帧观测到的路标点没有被其他帧观测到,连同路标点一并删除
后端优化中要求解方程Hx=b,研究发现H是一个稀疏矩阵,于是对该矩阵分块,使用Schur消元也就是边缘化的方法,先求出了关键帧的位姿,再求解路标点的坐标。
边缘化某个关键帧就是固定当前帧的位姿估计值,求其他变量以这个帧的位姿估计值为条件的条件概率
边缘化某个关键帧会导致右下角路标点矩阵不再是对角矩阵,这个过程也叫填入,使得BA无法按照原先的稀疏方式进行求解,这也导致了EKF无法处理较大规模的滑动窗口。
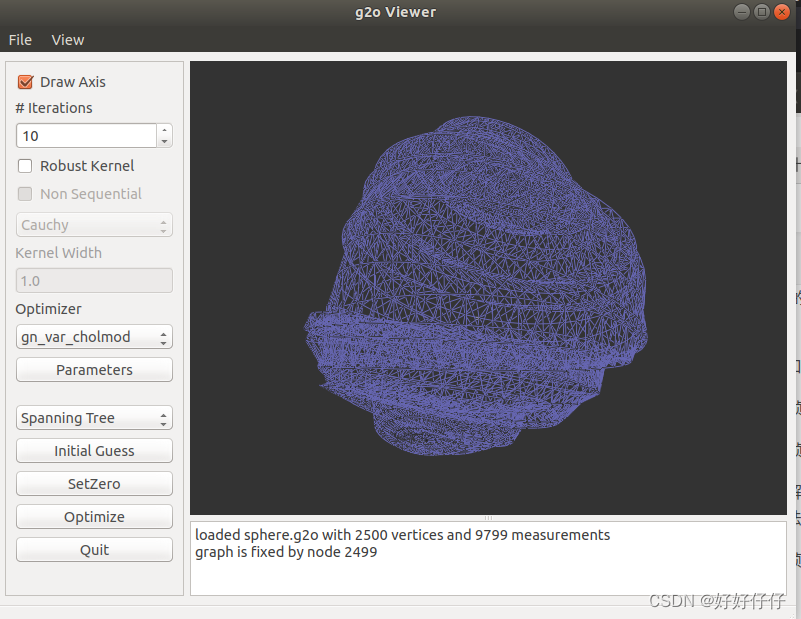
位姿图优化
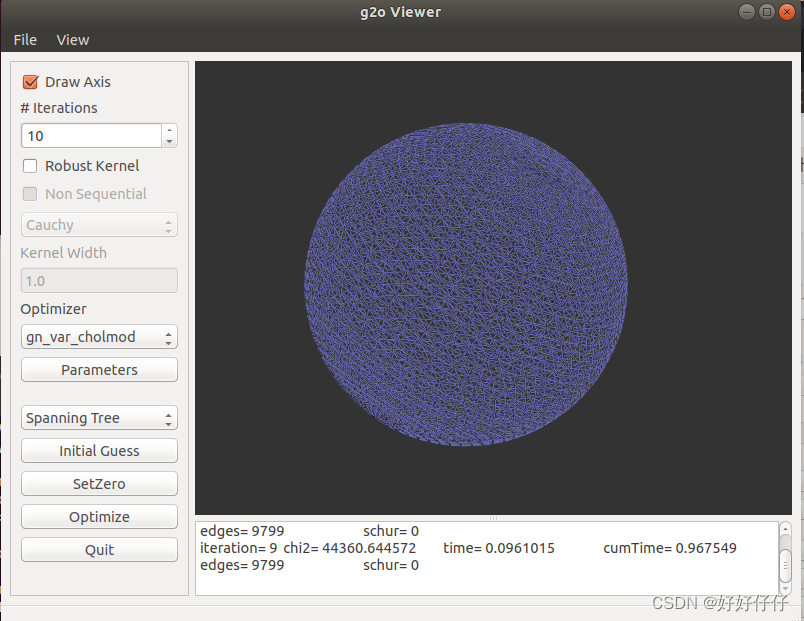
舍弃对路标点的优化,只保留对位姿的优化。也就是固定地图点,求位姿。
优化前:
优化后:
使用g2o进行优化的步骤
1. 确认每个误差项优化变量维度和误差值的维度。如在曲线优化中,每一个点有3个待优化变量abc,误差值只有一项,所以是3,1;而在位姿优化中,每一个点有6个待优化变量,误差项有6项。
2. 创建一个线性求解器
3. 创建一个块求解器,并用线性求解器进行初始化
4. 创建总求解器,选择优化方法,再用上述块求解器进行初始化
5. 创建稀疏优化器SparseOptimizer
6. 定义图的顶点和边,添加到SparseOptimizer中
7.设置优化参数,开始优化
// 设定g2o 点代表待优化变量,边代表观测(误差项)
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 6>> BlockSolverType;//确定待优化的变量个数以及误差项个数
typedef g2o::LinearSolverEigen<BlockSolverType::PoseMatrixType> LinearSolverType;
auto solver = new g2o::OptimizationAlgorithmLevenberg(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm(solver); // 设置求解器
optimizer.setVerbose(true); // 打开调试输出
int vertexCnt = 0, edgeCnt = 0; // 顶点和边的数量
while (!fin.eof()) {
string name;
fin >> name;
if (name == "VERTEX_SE3:QUAT") {
// 添加SE3 顶点
g2o::VertexSE3 *v = new g2o::VertexSE3();
int index = 0;
fin >> index;
v->setId(index);
v->read(fin);
optimizer.addVertex(v);
vertexCnt++;
if (index == 0)
v->setFixed(true);
} else if (name == "EDGE_SE3:QUAT") {
// 添加SE3-SE3 边
g2o::EdgeSE3 *e = new g2o::EdgeSE3();
int idx1, idx2; // 关联的两个顶点
fin >> idx1 >> idx2;
e->setId(edgeCnt++);
e->setVertex(0, optimizer.vertices()[idx1]);
e->setVertex(1, optimizer.vertices()[idx2]);
e->read(fin);
optimizer.addEdge(e);
}
if (!fin.good()) break;
}
optimizer.initializeOptimization();
optimizer.optimize(30);
optimizer.save("result.g2o");
return 0;
}
// 构建图优化,先设定g2o
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block; // 每个误差项优化变量维度为3,误差值维度为1
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>(); // 线性方程求解器
Block* solver_ptr = new Block( linearSolver ); // 矩阵块求解器
// 梯度下降方法,从GN, LM, DogLeg 中选
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );//选择了LM
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 设置求解器 用前面定义好的求解器作为求解方法
optimizer.setVerbose( true ); // 打开调试输出
// 往图中增加顶点
CurveFittingVertex* v = new CurveFittingVertex();
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addVertex( v );
// 往图中增加边
for ( int i=0; i<N; i++ )
{
CurveFittingEdge* edge = new CurveFittingEdge( x_data[i] );
edge->setId(i);
edge->setVertex( 0, v ); // 设置连接的顶点
edge->setMeasurement( y_data[i] ); // 观测数值
edge->setInformation( Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma) ); // 信息矩阵:协方差矩阵之逆
optimizer.addEdge( edge );
}
// 执行优化
cout<<"start optimization"<<endl;
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.initializeOptimization();
optimizer.optimize(100);
// 输出优化值
Eigen::Vector3d abc_estimate = v->estimate();
cout<<"estimated model: "<<abc_estimate.transpose()<<endl;















 3941
3941











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









