







前言
图论起源于著名的哥尼斯堡七桥问题——从这四块陆地中任何一块开始,通过每一座桥正好
一次,再回到起点。欧拉在 1736 年解决了这个问题,欧拉证明了这个问题没有解,并且推广
了这个问题,给出了对于一个给定的图可以某种方式走遍的判定法则。这就是后来的欧拉路
径和欧拉回路。这项工作使欧拉成为图论〔及拓扑学〕的创始人。


基本概念
图的定义和分类
图是由顶点V的集合和边E的集合组成的二元组:
• 记
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)
• 存在一个结点
v
v
v,可能含有多个前驱结点和后继结点。
- 有向图,点与有向边的集合
- 带权图(网),图中的边加上表示某种含义的数值,数值称为边的权
- 连通,两顶点间有路可通
- 连通图:能连成一片的图
- 连通分量:无向图中的极大连通子图

路径
在图
G
=
(
V
,
E
)
G=(V,E)
G=(V,E)中,如果对于结点
a
a
a ,
b
b
b,存在满足下述条件的结点序列
x
1
…
…
x
k
(
k
>
1
)
x_1……x_k(k>1)
x1……xk(k>1)
⑴
x
1
=
a
,
x
k
=
b
x_1=a,x_k=b
x1=a,xk=b ⑵
(
x
i
,
x
i
+
1
)
∈
E
(
i
=
1
‥
k
−
1
)
(x_i,x_{i+1})∈E (i=1‥k-1)
(xi,xi+1)∈E(i=1‥k−1)
则称结点序列
x
1
=
a
,
x
2
,
…
,
x
k
=
b
x_1=a,x_2,…,x_k=b
x1=a,x2,…,xk=b 为结点
a
a
a 到结点
b
b
b 的一条路径,而路径上边的数目
(
k
−
1
)
(k-1)
(k−1) 称为该路径的长度。
若起点与终点相同则为环(也叫做回路)
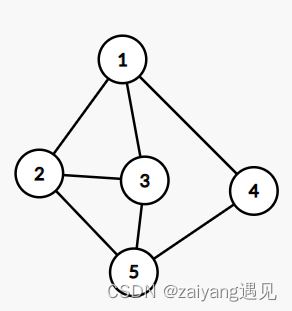
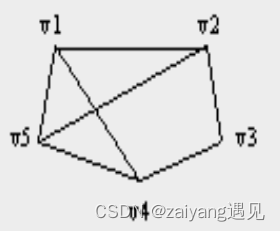
顶点的度、入度、出度
在无向图中:顶点
v
v
v 的度是指与顶点
v
v
v 相连的边的数目。
D
(
2
)
=
3
D( 2 )=3
D(2)=3
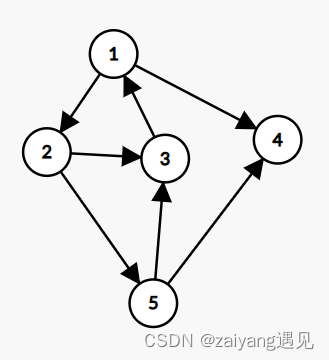
在有向图中:
- 入度,以该顶点为终点的边的数目 I D ( 3 ) = 2 ID(3)=2 ID(3)=2
- 出度,以该顶点为起点的边的数目 O D ( 3 ) = 1 OD(3)=1 OD(3)=1
- 度,等于该顶点的入度与出度之和。 D ( 5 ) = I D ( 5 ) + O D ( 5 ) = 1 + 2 = 3 D(5)=ID(5)+OD(5)=1+2=3 D(5)=ID(5)+OD(5)=1+2=3
图的存储
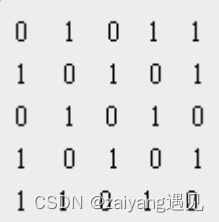
邻接矩阵
m
a
p
[
i
]
[
j
]
map[i][j]
map[i][j] 表示
i
i
i 点到
j
j
j 点的边权
无向图的邻接矩阵是对称的(一条无向边对应两条有向边)
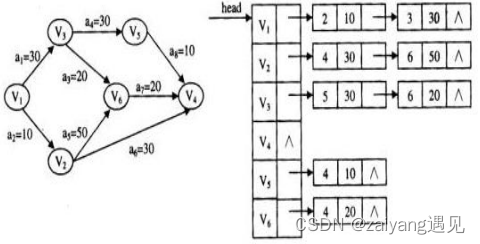
邻接表
伪邻接表(链式前向星)
struct ty
{
int dian,l;
struct node *next;
}*[60020];
void insert(int x,int y,int z)
{
node *p=new node;
p->dian=y; //x-->y
p->l=z; //权值
p->next=edge[x];
edge[x]=p;
}
struct ty{
int t,next;
};
void insertedge(int x,int y)
{
edge[++m].t=y;
edge[m].next=head[x];
head[x]=m;
}
图的DFS遍历
算法步骤:
1、从某个节点开始,每次任选一个与它相邻的未访问节点访问下去
2、直到当前节点的所有相邻节点都已经被访问过。
3、回溯到第一个未被访问过的节点
图的BFS遍历
1、用
d
i
s
[
]
dis[]
dis[] 数组表示各点距离起点
S
S
S 的距离。
d
i
s
[
i
]
=
−
1
dis[i]=-1
dis[i]=−1 表示
i
i
i 点还未被访问。用
m
a
p
[
i
]
[
j
]
map[i][j]
map[i][j] 表示
i
i
i 点和
j
j
j 点之间是否有边。
2、将
d
i
s
[
s
]
dis[s]
dis[s] 初始化为
0
0
0,将其它点的
d
i
s
dis
dis 初始化为
−
1
-1
−1。将
S
S
S 点入队
3、while(队列非空)
从队首出队一个元素
u
u
u
对于所有跟
u
u
u 有边相连的点
v
v
v:
if(dis[v]==-1)
dis[v]=dis[u]+1;
v入队
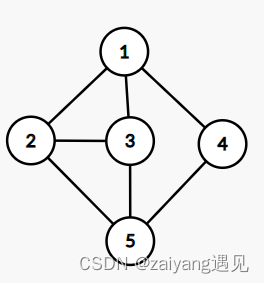
判断是否为欧拉图
如果图 G G G 中的一个路径包括每个边恰好一次,则该路径称为欧拉路径(Euler path)。
如果一个回路是欧拉路径,则称为欧拉回路(Euler circuit)。
具有欧拉回路的图称为欧拉图(简称E图)。具有欧拉路径但不具有欧拉回路的图称为半欧拉图。
无向图存在欧拉回路的充要条件:
• 一个无向图存在欧拉回路,当且仅当该图所有顶点度数都为偶数,且该图是连通图。
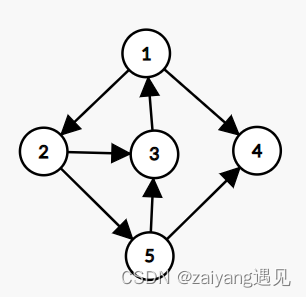
有向图存在欧拉回路的充要条件:
• 一个有向图存在欧拉回路,所有顶点的入度等于出度且该图是连通图。
拓扑排序
一个工程常被分为多个小的子工程,这些子工程被称为活动(Activity),在有向图中若以顶点表示活动,有向边表示活动之间的先后关系,这样的图简称为AOV网。在AOV网中为了更好地完成工程,必须满足活动之间先后关系,需要将各活动排一个先后次序即为拓扑排序。
步骤:
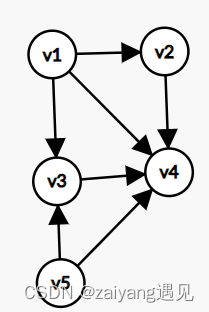
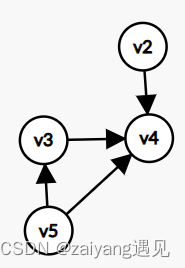
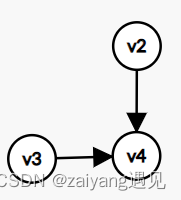
- 从有向图中选取一个没有前驱的顶点,并输出之;
- 从有向图中删去此顶点以及所有以它为尾的弧;
- 重复上述两步,直至图空,或者图不空但找不到无前驱的顶点为止。
没有前驱 – 入度为零;删除顶点及以它为尾的弧-- 弧头顶点的入度减 1 1 1。
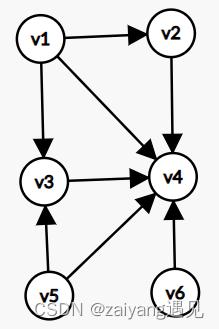
举例:
根据算法思想:
找到的点的顺序依次为
v
6
,
v
1
,
v
5
,
v
3
,
v
2
,
v
4
v_6 , v_1 , v_5 , v_3 , v_2 , v_4
v6,v1,v5,v3,v2,v4
可以看到,拓扑排序可能有多解
(注意一边输出当前点,一边更新其他点的入度)

拓扑排序的使用:
判断一个有向图中是否有环。无环的图所有点都能进行拓扑排序。
关键路径
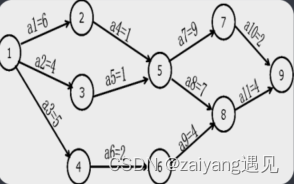
AOE网(Activity On Edge network),即边表示活动的网络,与AOV网相对应,它通常表示一个工程的计划或进度。
• AOE网是一个带权的有向无环图,图中的:边:表示活动(子工程),边上的权:表示该活动的持续时间,即完成该活动所需要的时间。
• 顶点:表示事件,每个事件是活动之间的转接点,即表示它的所有入边活动到此完成,所有出边活动从此开始。
其中有两个特殊的顶点(事件),一个称做源点,它表示整个工程的开始,亦即最早活动的起点,显然它只有出边,没有入边;另一个称做汇点,它表示整个工程的结束,亦即最后活动的终点,显然它只有入边,没有出边。除这两个顶点外,其余顶点都既有入边,也有出边,是入边活动和出边活动的转接点。
AOE网中有些活动可以并行进行,所以完成整个工程的最短时间是从源点到汇点的最长路径长度,路径长度为路径上各边的权值之和。把从源点到汇点的最长路径长度称为关键路径。
对于一个AOE网,待研究的问题是:
(1)整个工程至少需要多长时间完成?
(2)哪些活动是影响工程进度的关键?
假设开始点是
v
1
v_1
v1,从
v
1
v_1
v1 到
v
i
v_i
vi 的最长路径长度叫做事件
v
i
v_i
vi 的最早发生时间。这个时间决定了所有以
v
i
v_i
vi为尾的弧所表示的活动的最早开始时间。我们用
e
(
i
)
e(i)
e(i) 表示活动
a
i
a_i
ai 的最早开始时间。还可以定义一个活动的最迟开始时间
l
(
i
)
l(i)
l(i),这是在不推迟整个工程的前提下,活动
a
i
a_i
ai 最迟必须开始进行的时间。两者之差
l
(
i
)
−
e
(
i
)
l(i)-e(i)
l(i)−e(i) 意味着完成活动
a
i
a_i
ai 的时间余量。我们把
l
(
i
)
=
e
(
i
)
l(i)=e(i)
l(i)=e(i) 的活动叫做关键活动。
关键路径上的所有活动都是关键活动,因此提前完成非关键活动并不能加快工程的进度。


















 1463
1463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











