






1.Kuwahara_type 滤波原理
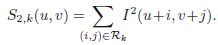
Kuwahara类型的滤波思想是由Kuwahara等人提出来的。其基本原理是:计算图像模板中邻域内的均值和方差,选择图像灰度值较为均匀的区域的均值替代模板中心像素灰度值。而图像模板中较为均匀的区域所对应的方差是最小的。为了获取图像模板中较为均匀区域的均值,滤波区域R被划分为K个重叠的子区域R1,R2,…, Rk。位于图像中位置为(u,v)处的每一个像素,其所对应的每一个模板子区域的均值和方差都将被计算:


对于k=1,……,K,有如下表达式成立:

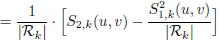
对应方差最小的子区域的均值替代模板中心像素的灰度值。即:

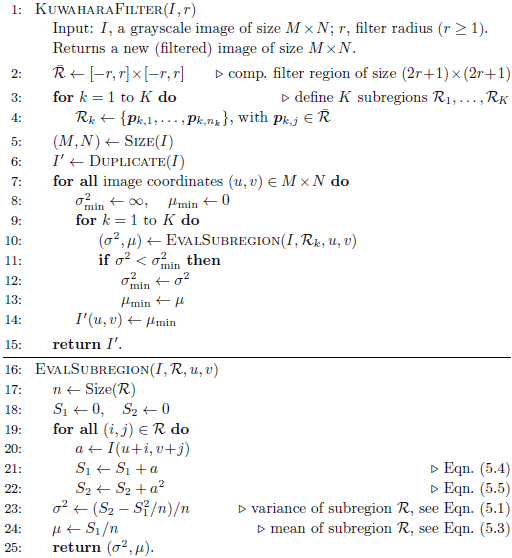
其伪代码实现如下图所示:
Kuwahara等人提出的3*3(r=1)模板子区域如Fig1所示。3*3的滤波模板中,其子区域由重叠与中心像素的(r+1)*(r+1)的正方形区域构成。一般而言,滤波模板的大小应该为(2*r+1)*(2*r+1)。
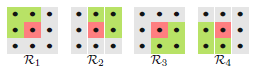
Fig1 .Subregionstructures for Kuwahara filters
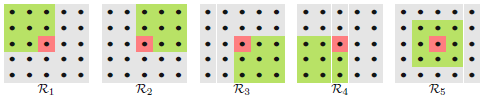
Fig2. Subregion structures for Tomita-Tsuji’s filters
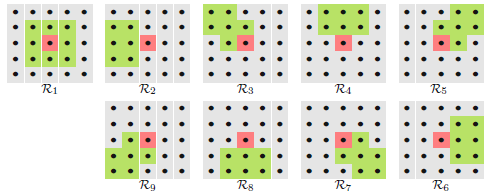
Fig3. Subregion structures for Nagao-Matsuyama’s filters
2.Kuwahara_type 滤波代码实现
typedef struct Area_Pix
{
T_U8 Model_Pix1;
T_U8 Model_Pix2;
T_U8 Model_Pix3;
T_U8 Model_Pix4;
T_U8 Model_Pix5;
T_U8 Model_Pix6;
T_U8 Model_Pix7;
T_U8 Model_Pix8;
T_U8 Model_Pix9;
}AREA_PIX;
AREA_PIX Arae[9] = {0};
int CalaMeanMin(AREA_PIX *area)
{
int i,flag = 0;
double MeanMin = 9999,Mean7 = 0,Mean8 = 0;
double VarianceMin = 99999,Variance7=0,Variance8 = 0;
double Pow_0,Pow_1,Pow_2,Pow_3,Pow_4,Pow_5,Pow_6,Pow_7=0,Pow_8=0;
for (i= 0;i< 8;i++)
{
Mean7 =(area[i].Model_Pix1+area[i].Model_Pix2+area[i].Model_Pix3\
+area[i].Model_Pix4+area[i].Model_Pix5+area[i].Model_Pix6+area[i].Model_Pix7)/7;
Pow_0 = pow((area[i].Model_Pix1-Mean7),2);
Pow_1 = pow((area[i].Model_Pix2-Mean7),2);
Pow_2 = pow((area[i].Model_Pix3-Mean7),2);
Pow_3 = pow((area[i].Model_Pix4-Mean7),2);
Pow_4 = pow((area[i].Model_Pix5-Mean7),2);
Pow_5 = pow((area[i].Model_Pix6-Mean7),2);
Pow_6 = pow((area[i].Model_Pix7-Mean7),2);
Variance7 = (Pow_0+Pow_1+Pow_2+Pow_3+Pow_4+Pow_5+Pow_6)/7;
if(VarianceMin > Variance7)
{
VarianceMin = Variance7;
MeanMin = Mean7;
}
}
Mean8 = (area[8].Model_Pix1+area[8].Model_Pix2+area[8].Model_Pix3+area[8].Model_Pix4+area[8].Model_Pix5\
+area[8].Model_Pix6+area[8].Model_Pix7+area[8].Model_Pix8+area[8].Model_Pix9)/9;
Pow_0 = pow((area[8].Model_Pix1-Mean8),2);
Pow_1 = pow((area[8].Model_Pix2-Mean8),2);
Pow_2 = pow((area[8].Model_Pix3-Mean8),2);
Pow_3 = pow((area[8].Model_Pix4-Mean8),2);
Pow_4 = pow((area[8].Model_Pix5-Mean8),2);
Pow_5 = pow((area[8].Model_Pix6-Mean8),2);
Pow_6 = pow((area[8].Model_Pix7-Mean8),2);
Pow_6 = pow((area[8].Model_Pix8-Mean8),2);
Pow_6 = pow((area[8].Model_Pix9-Mean8),2);
Variance8 = (Pow_0+Pow_1+Pow_2+Pow_3+Pow_4+Pow_5+Pow_6+Pow_7+Pow_8)/9;
if(VarianceMin > Variance8)
{
VarianceMin = Variance8;
MeanMin = Mean8;
}
if (MeanMin > 255)
MeanMin = 255;
if (MeanMin < 0)
MeanMin = 0;
return (T_U8)MeanMin;
}
int AddArea(AREA_PIX *area,T_U8 p1,T_U8 p2,T_U8 p3,T_U8 p4,T_U8 p5,T_U8 p6,T_U8 p7,T_U8 p8,T_U8 p9)
{
area->Model_Pix1 = p1;
area->Model_Pix2 = p2;
area->Model_Pix3 = p3;
area->Model_Pix4 = p4;
area->Model_Pix5 = p5;
area->Model_Pix6 = p6;
area->Model_Pix7 = p7;
area->Model_Pix8 = p8;
area->Model_Pix9 = p9;
return 0;
}
T_U8 KuwaharaType_Filter_TempCala(DWORD width,DWORD height,T_U8* Graybmp_img,T_U8* Temp_dst,DWORD x,DWORD y,T_U32 line_byte)
{
T_U32 index = x*line_byte+y*3;
T_U8 p0,p1,p2,p3,p4,p5,p6,p7,p8,p9,p10,p11,p12,p13,p14,p15,p16,p17,p18,p19,p20,p21,p22,p23,p24;
p0 = Graybmp_img[index+0-2*line_byte-6];
p1 = Graybmp_img[index+0-2*line_byte-3];
p2 = Graybmp_img[index+0-2*line_byte];
p3 = Graybmp_img[index+0-2*line_byte+3];
p4 = Graybmp_img[index+0-2*line_byte+6];
p5 = Graybmp_img[index+0-line_byte-6];
p6 = Graybmp_img[index+0-line_byte-3];
p7 = Graybmp_img[index+0-line_byte];
p8 = Graybmp_img[index+0-line_byte+3];
p9 = Graybmp_img[index+0-line_byte+6];
p10 = Graybmp_img[index+0-6];
p11 = Graybmp_img[index+0-3];
p12 = Graybmp_img[index+0];
p13 = Graybmp_img[index+0+3];
p14 = Graybmp_img[index+0+6];
p15 = Graybmp_img[index+0+line_byte-6];
p16 = Graybmp_img[index+0+line_byte-3];
p17 = Graybmp_img[index+0+line_byte];
p18 = Graybmp_img[index+0+line_byte+3];
p19 = Graybmp_img[index+0+line_byte+6];
p20 = Graybmp_img[index+0+2*line_byte-6];
p21 = Graybmp_img[index+0+2*line_byte-3];
p22 = Graybmp_img[index+0+2*line_byte];
p23 = Graybmp_img[index+0+2*line_byte+3];
p24 = Graybmp_img[index+0+2*line_byte+6];
AddArea(&Arae[0],p1,p2,p3,p6,p7,p8,p12,0,0);
AddArea(&Arae[1],p3,p4,p7,p8,p9,p12,p13,0,0);
AddArea(&Arae[2],p8,p9,p12,p13,p14,p18,p19,0,0);
AddArea(&Arae[3],p12,p13,p17,p18,p19,p23,p24,0,0);
AddArea(&Arae[4],p12,p16,p17,p18,p21,p22,p23,0,0);
AddArea(&Arae[5],p11,p12,p15,p16,p17,p20,p21,0,0);
AddArea(&Arae[6],p5,p6,p11,p12,p10,p15,p16,0,0);
AddArea(&Arae[7],p0,p1,p5,p6,p7,p11,p12,0,0);
AddArea(&Arae[8],p6,p7,p8,p11,p12,p13,p16,p17,p18);
Temp_dst[index+0] = CalaMeanMin(Arae);
Temp_dst[index+1] = Temp_dst[index+0];
Temp_dst[index+2] = Temp_dst[index+0];
return 0;
}
int KuwaharaType_Filter(IMAGE_TYPE *Graybmp_img)
{
DWORD width,height,x,y,bfsize;
WORD biBitCount;
T_U8 *dst,*bmp,*Temp,*Tempdst;
T_U32 line_byte,index;
BITMAPFILEHEADER bf;
BITMAPINFOHEADER bi;
FILE *KuwaharaType_FilterBMP_fp = fopen("KuwaharaType_Filter.bmp","wb");
if(NULL == KuwaharaType_FilterBMP_fp)
{
printf("Can't open KuwaharaType_Filter.bmp\n");
return -1;
}
memset(&bf, 0, sizeof(bf));
memset(&bi, 0, sizeof(bi));
bmp = Graybmp_img;
memcpy(&bf,bmp,14);
memcpy(&bi,&bmp[14],40);
height = bi.biHeight;
width = bi.biWidth;
bfsize = bf.bfSize;
biBitCount = bi.biBitCount;
line_byte = WIDTHBYTES(width*bi.biBitCount);
dst = bmp+54;
Temp = (T_U8 *)malloc(bfsize);
memset(Temp,0,bfsize);
memcpy(Temp,bmp,bfsize);
Tempdst = Temp+54;
for (x = SIZE/2;x < height-SIZE/2;x++)
{
for (y = SIZE/2;y < width-SIZE/2;y++)
{
KuwaharaType_Filter_TempCala(width,height,dst,Tempdst,x,y,line_byte);
}
}
fwrite(Temp,bfsize,1,KuwaharaType_FilterBMP_fp);
fclose(KuwaharaType_FilterBMP_fp);
KuwaharaType_FilterBMP_fp = NULL;
free(Temp);
return 0;
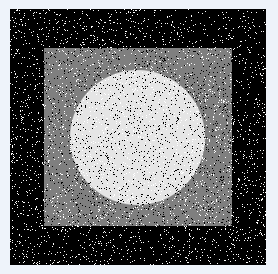
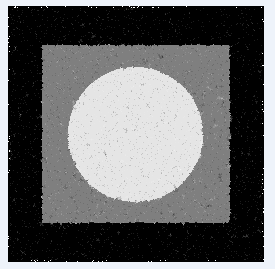
}滤波效果如下所示:

















 7883
7883

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









