







 这篇博客详细介绍了如何使用STM32设置SPI时钟为3MHz,通过HAL_SPI_Transmit和HAL_SPI_Receive函数读取W25Q64闪存的ID。分析了读取过程中的时序,包括字节间间隔和总时间。在不同SPI时钟频率下,如1.5MHz和6MHz,观察到的SPI时钟波形变化。调试结果显示ID为0xEF16。博客还强调了HAL库函数在连续发送和接收多个字节时的效率。
这篇博客详细介绍了如何使用STM32设置SPI时钟为3MHz,通过HAL_SPI_Transmit和HAL_SPI_Receive函数读取W25Q64闪存的ID。分析了读取过程中的时序,包括字节间间隔和总时间。在不同SPI时钟频率下,如1.5MHz和6MHz,观察到的SPI时钟波形变化。调试结果显示ID为0xEF16。博客还强调了HAL库函数在连续发送和接收多个字节时的效率。
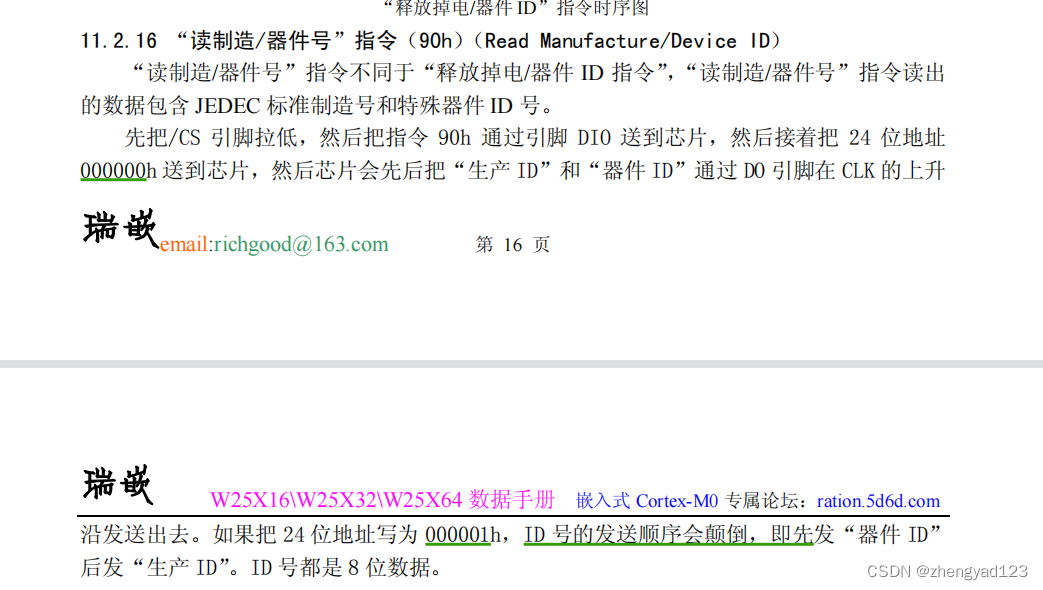
W25Q64的ID

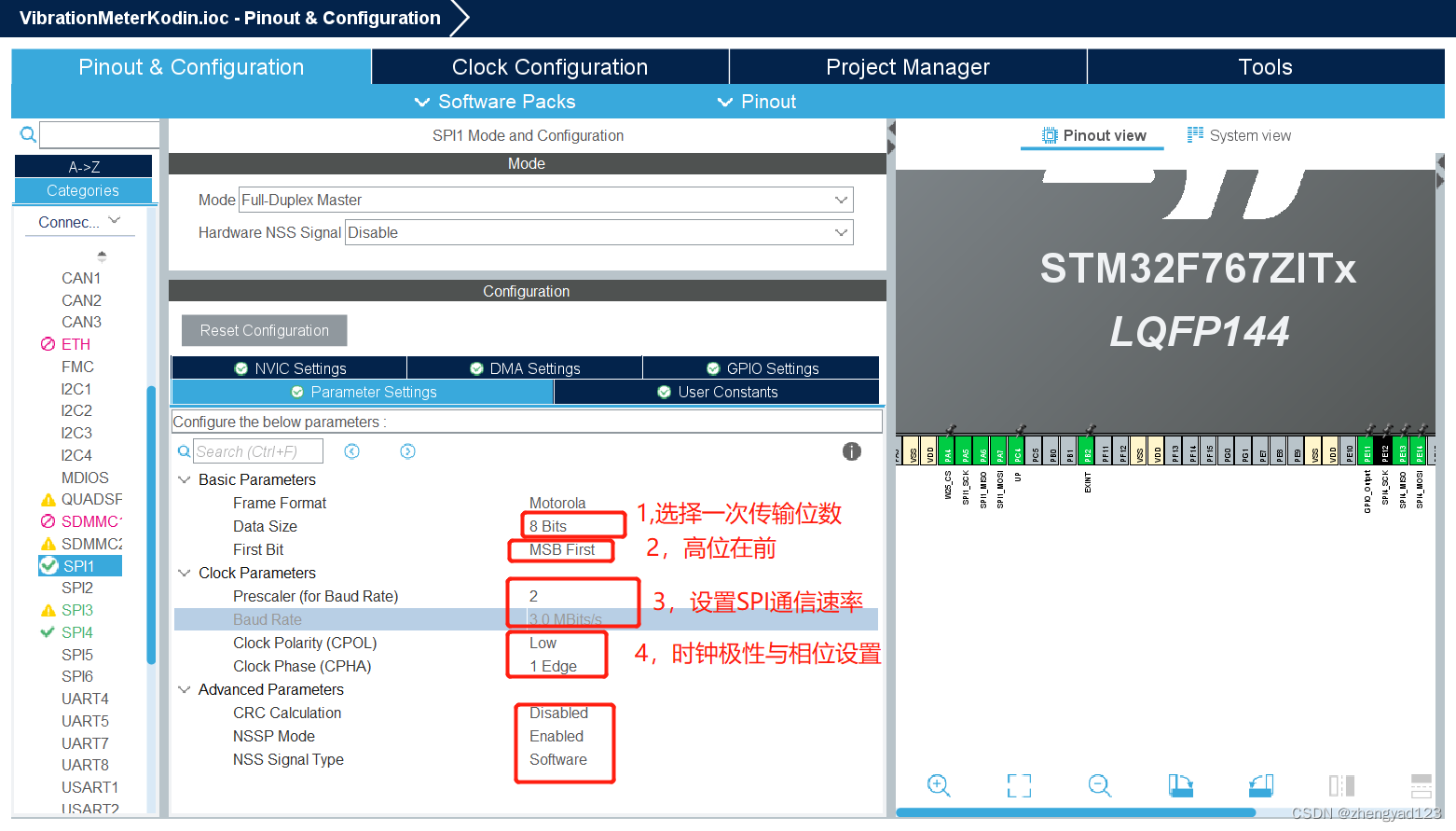
STM32设置如下
时钟频率3M
读函数
uint16_t W25_Read_ID(void)
{
uint16_t temp = 0;
uint8_t id[2] = {0,0};
uint8_t cmd[4] = {READ_ID_CMD,0x00,0x00,0x00};
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&hspi1,id, 2, W25Qx_TIMEOUT_VALUE);
W25Qx_Disable();
temp = ((id[0]<<8)|id[1]);
return temp;
}分析:8位字节传输,下发指令用了4个字节,读id用了2个字节。
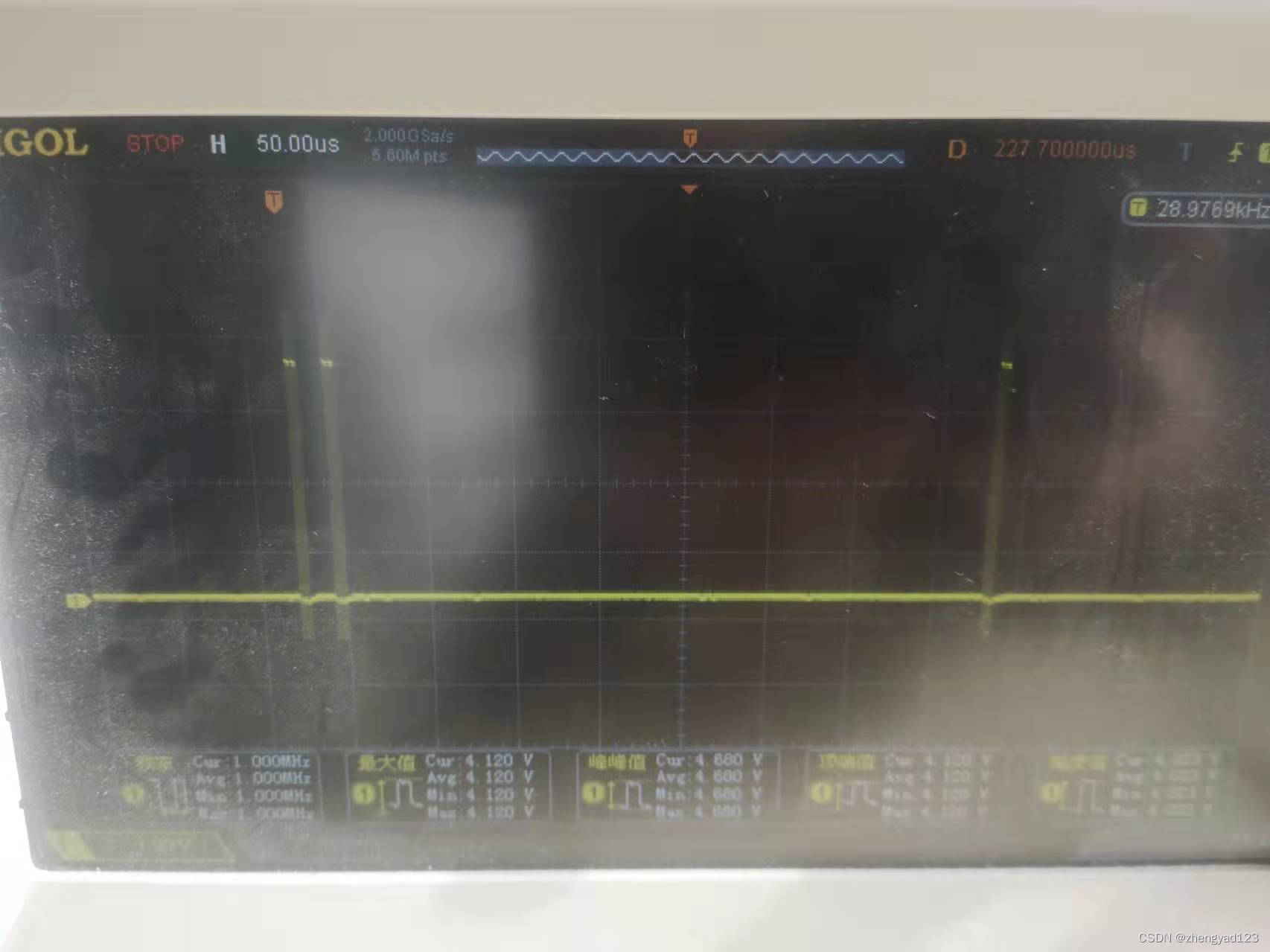
1,时钟3M,1us里面有3个时钟,两个直接连续发送,中间间隔约1us。
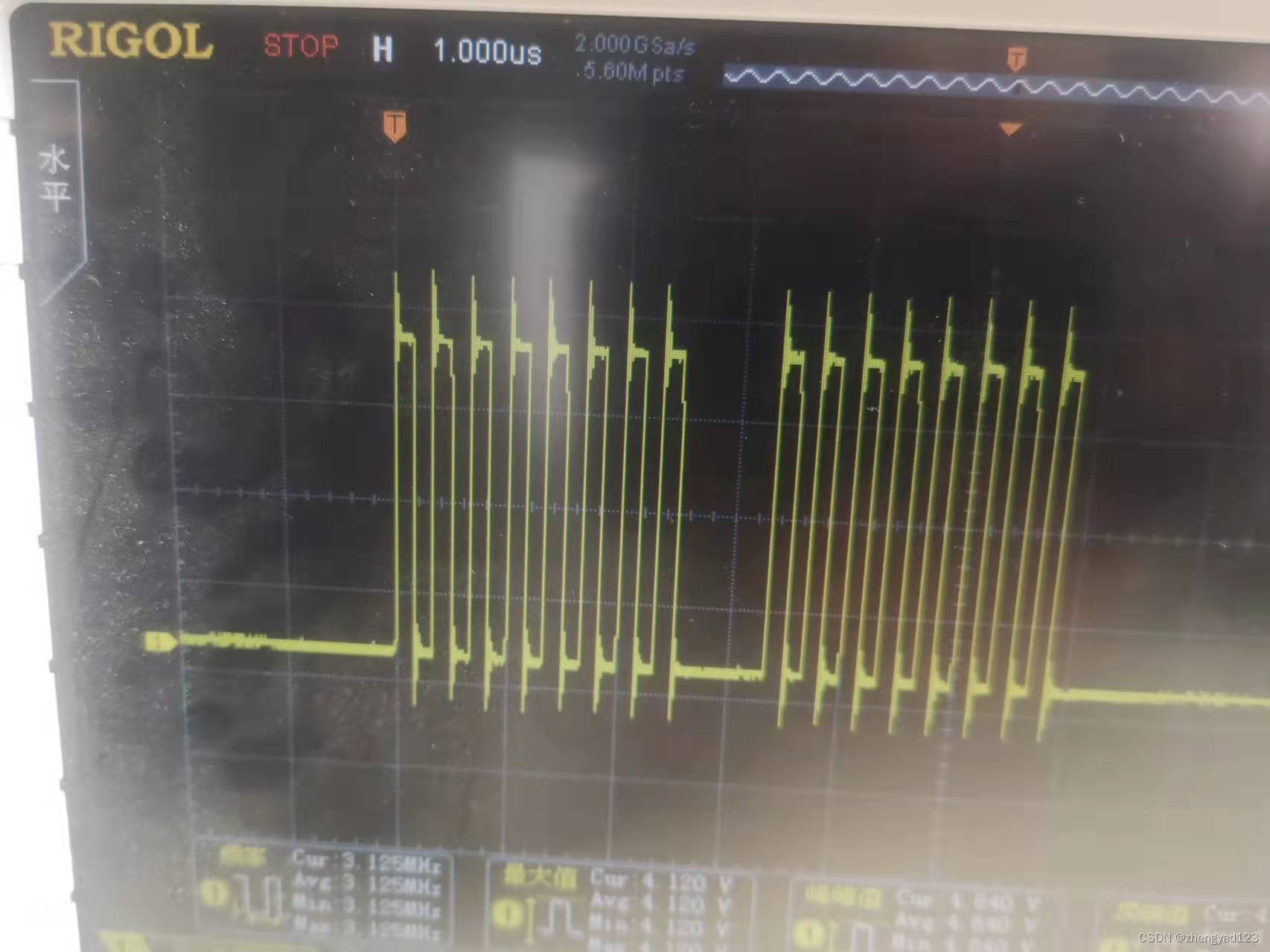
2,四个指令下发时钟图如下,前两个字节相隔约1us,与后两个字节相隔约15us。
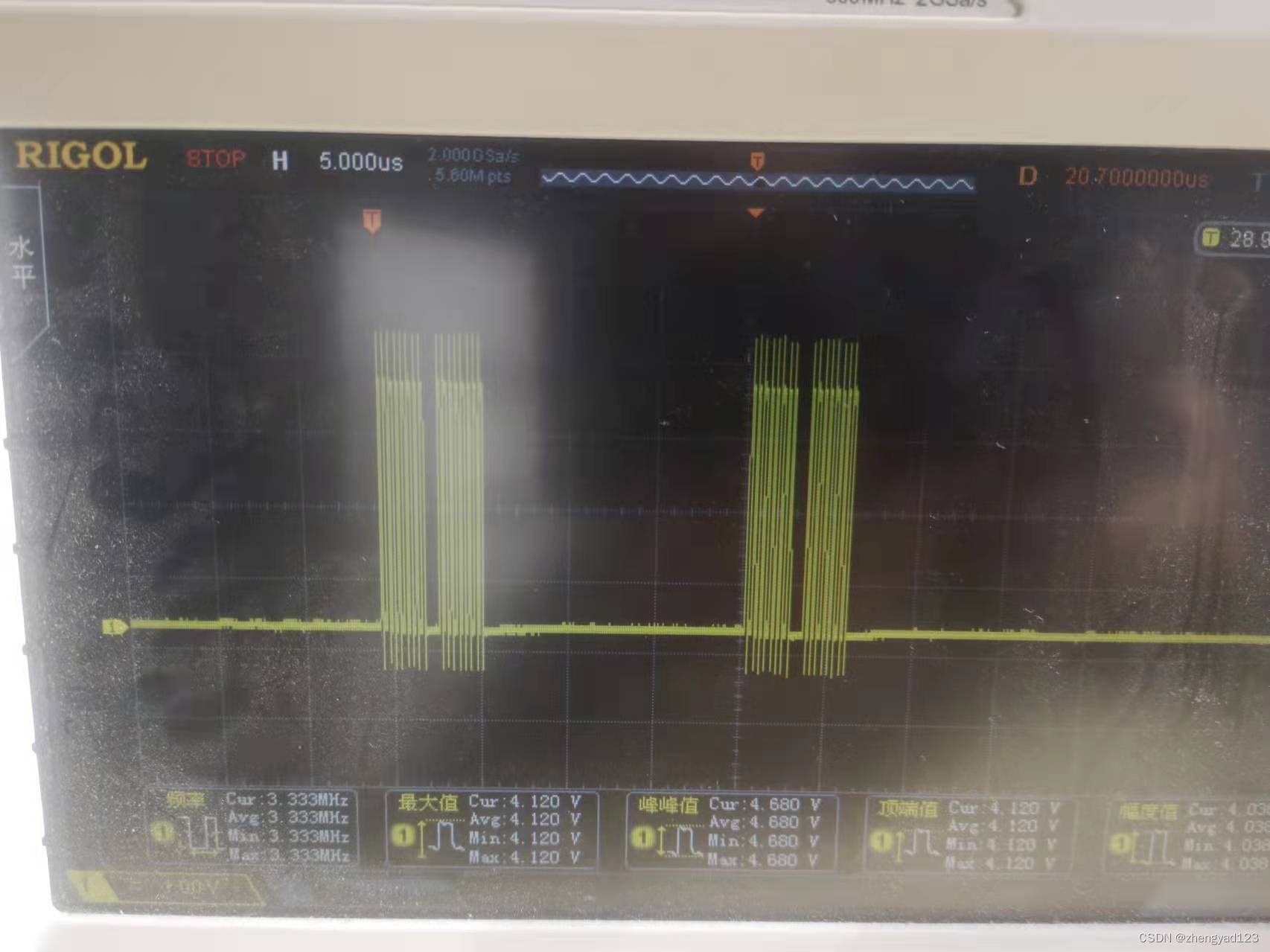
3,周期拉长之后,前面是4个下发指令 ,后面是两个读id时钟,下面一个脉冲其实是两个字节的时钟。
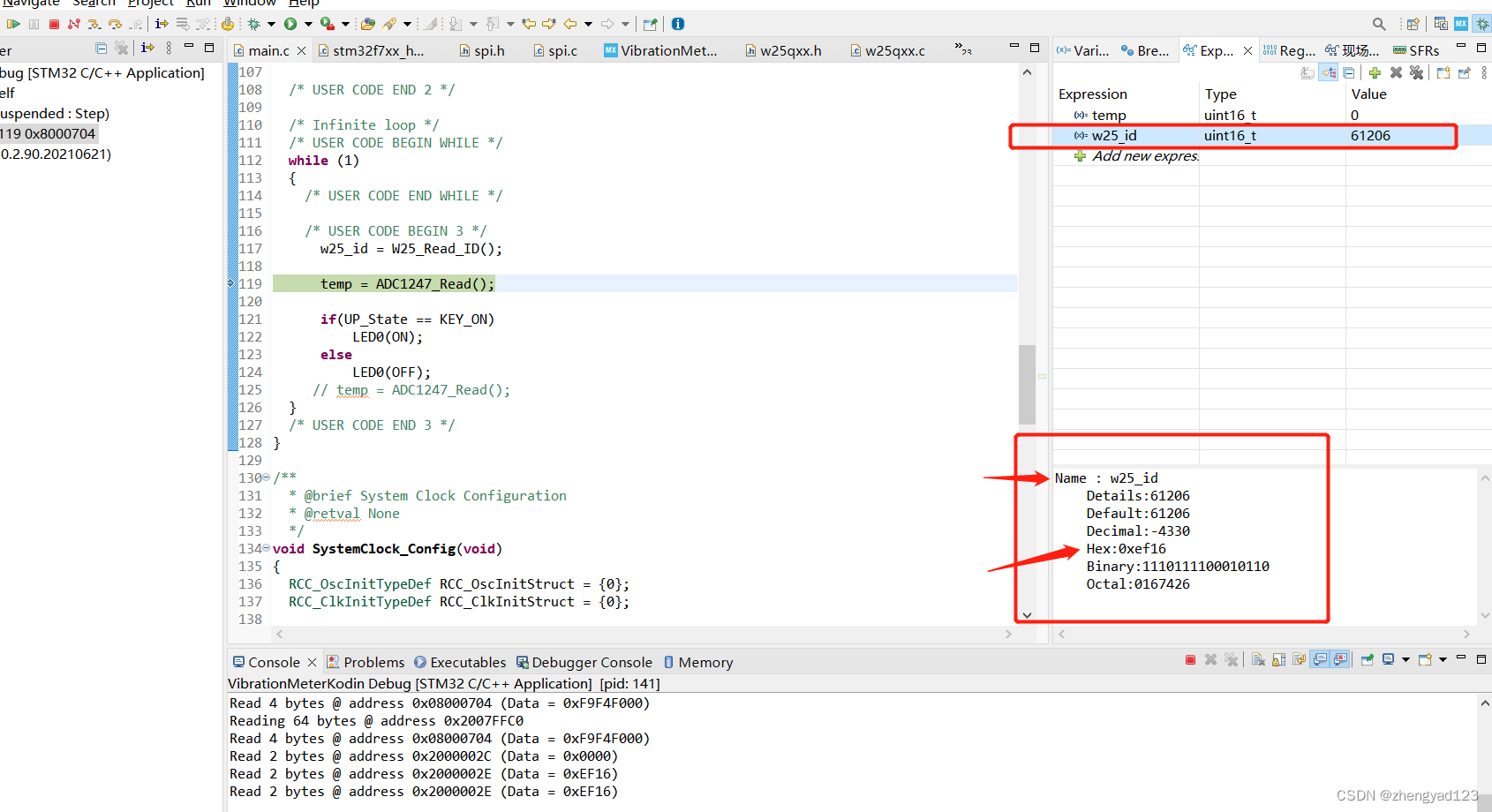
调试模式查看寄存器的值(ID) 0xEF16
总结:
/* Send the read ID command */
HAL_SPI_Transmit(&hspi1, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
HAL_SPI_Receive(&hspi1,id, 2, W25Qx_TIMEOUT_VALUE);
HAL_SPI_Transmit()和HAL_SPI_Receive()函数可以连续发送和接受多个字节,由第三个参数确定。第二个参数可以是变量也可以是数组,使用数组来发送和接受多个字节。
用示波器看(SPI时钟3M),连续俩个字节之间时间间隔比较小,两两字节之间时间间隔拉大。实测发现,在现主频一定的情况下,两个字节占用时间20us(应该和SPI模块的Fpclk有关,Fpclk提高之后,这个值变小),发送两个字节之后,时钟停止,到20us之后,发送下一个两个字节。
下图是SPI时钟1.5M情况下的波形
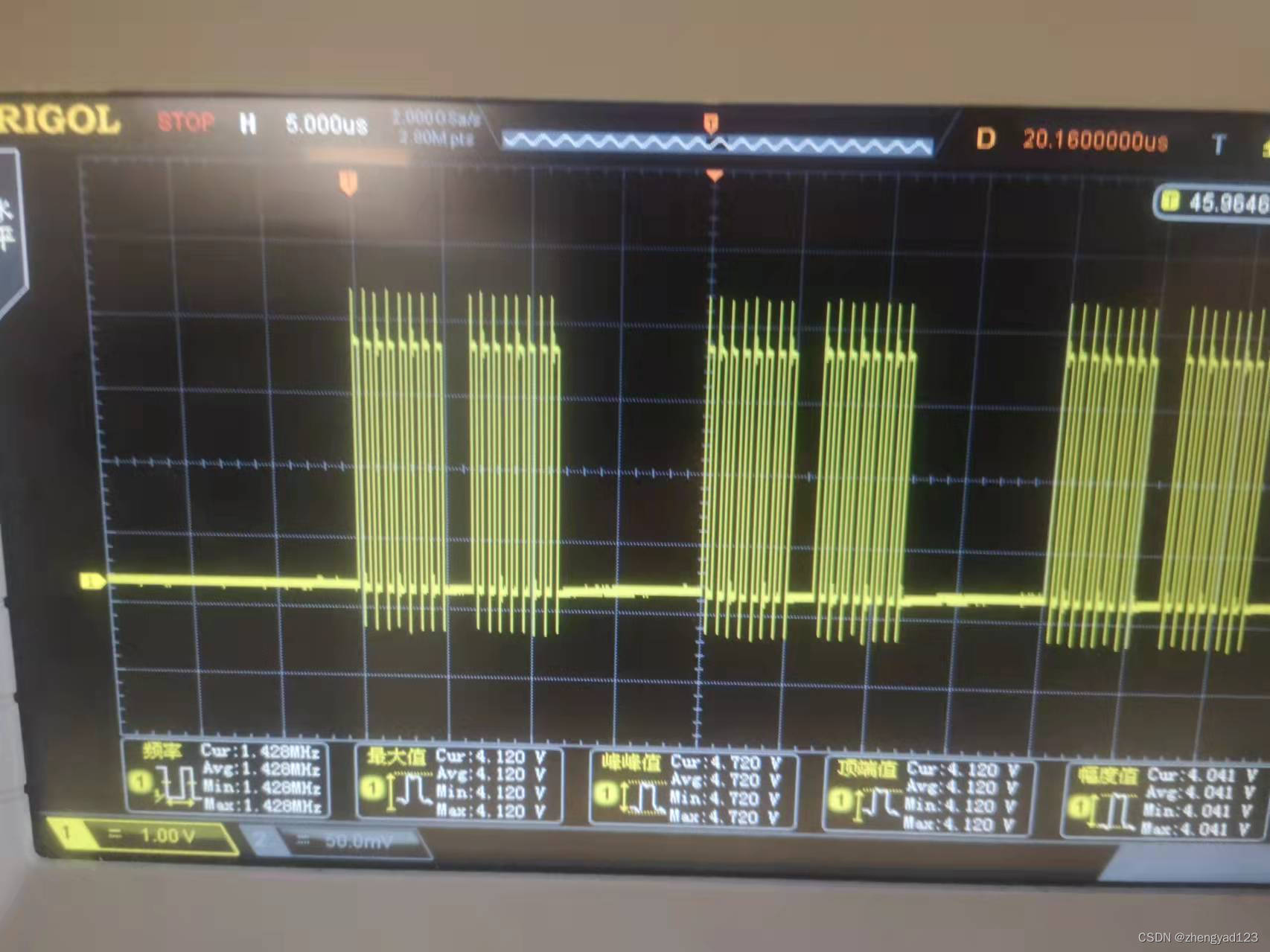
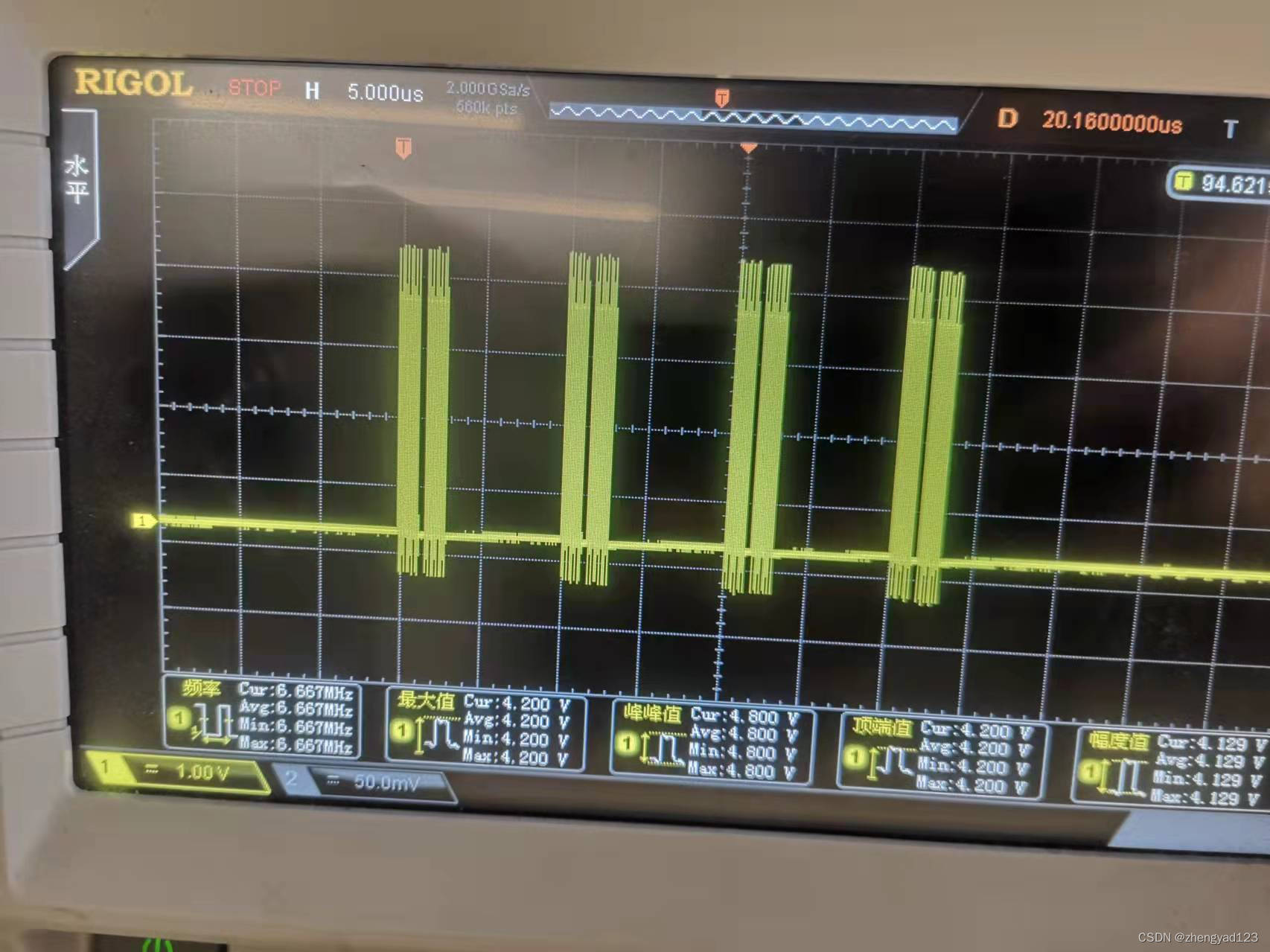
Fpclk提高到12M比原来提高一倍,SPI时钟变为6M,

















 934
934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









