







目录
前提介绍
本章内容简介:本文研究了使用双行轨道报和SGP4模型估计空间LEO目标位置信息,并根据几何关系推测目标等效转速进而实现ISAR成像的方位维定标。最后尝试通过仿真演示该方法的流程和效果。
ISAR成像定标方法的研究具有重要意义,但是与之相关的学习资料以及仿真对于小白来说很难找或者很杂乱,本人作为小白之一在研究过程中苦不堪言,现在自己所要研究的定标内容已经完成,以后还学不学雷达也不一定,因为后面的路更难,现在打算把一些相关推导和仿真结果列出来,以供小白交流学习使用,希望能有点帮助。(PS:由于公式和符号的原因,采用图片形式说明)
逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)能对空间运动目标进行成像,其相关技术在战略预警、目标分类和目标识别等方面广泛应用,在空间监视中发挥着重要的作用。在目标识别等应用方面上,作为输入的ISAR图像需要提供目标的形状信息和精确的尺寸信息。目标的形状信息可以由ISAR成像时获得的目标距离-多普勒投影图像直接获得,但是目标精确的尺寸信息则需要获得目标的距离及方位分辨率确定图像各单元的具体长度,并对目标进行定标处理获得目标的实际尺寸大小。因此本文研究ISAR成像技术和图像定标方法具有重要意义。
在获得观测目标图像后,还需要对图像进行定标处理,以获得目标在实际中的真实尺寸。距离维的定标很好实现,由已知参数将距离单元转化为距离维的真实物理尺寸即可。已知方位维的转换因子与目标等效转速有关,因此要实现目标方位维的定标需要先实现目标等效转速的估计。本章节将研究利用空间目标轨道信息估计等效转速,在本章的末尾将针对所提方法给出仿真实验验证。
基于SGP4模型的转速估计
基于SGP4模型的空间目标定标仿真实验
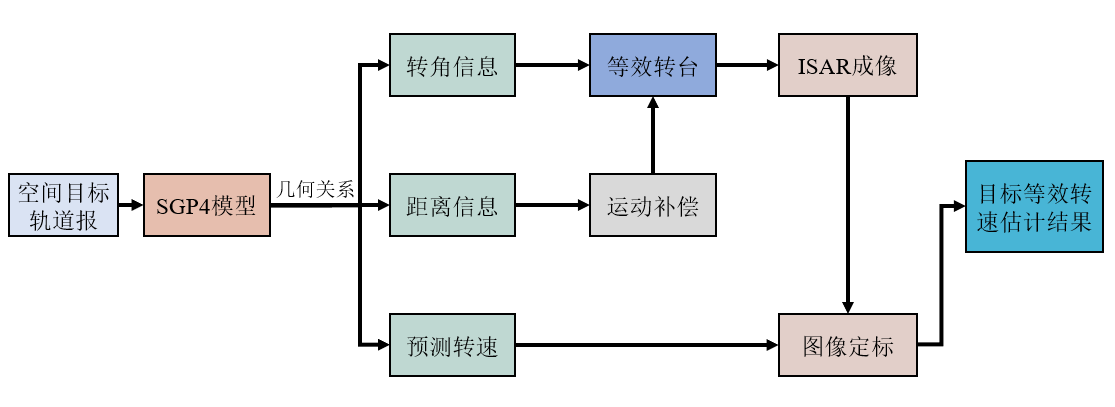
针对空间目标成像的定标问题,可以先下载目标的TLE轨道报信息,通过SGP4模型预测目标观测实验期间的位置信息和速度信息,通过观测的空间目标与观测雷达地面站之间的几何关系计算出目标的预测等效转速进而完成定标。为了进一步验证以上方法的有效性,本部分内容对所述方法进行仿真实验并展开研究和分析。
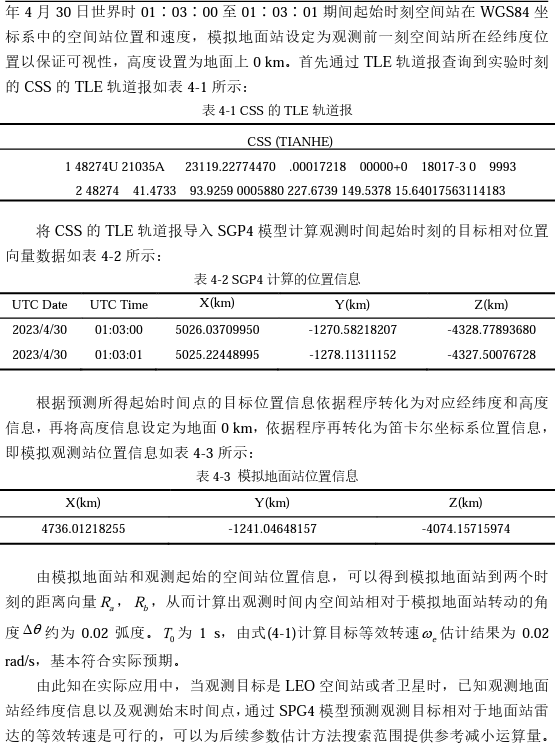
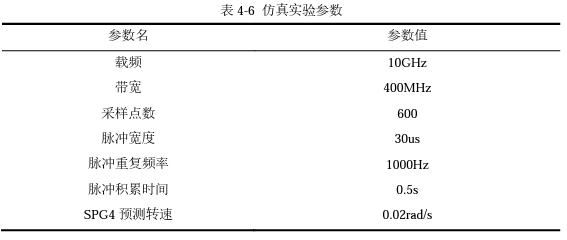
选择CSS作为模拟观测空间目标,以世界时2023年4月30日世界时01∶03∶00作为雷达观测的起始时刻,本节仿真实验参数如表4-6所示,观测成像时间为0.5 s,脉冲重复频率为1000。下载CSS的轨道报如表4-1所示,利用SGP4模型程序计算空间站在每一个脉冲发射时刻的位置信息,而模拟地面站设定为观测开始时刻空间站所在的经纬度位置,这样可以保证可视性从而符合实际,高度设置为地面上0 km。所有预测的位置信息转化为WGS84坐标系,其中模拟地面站转化为笛卡尔坐标系位置信息如表4-3所示。根据空间站和模拟地面站的几何关系,可以计算得到空间站在每一时刻的转角情况。将SGP4模型预测并计算得到的空间站与模拟地面站的位置信息以及转角信息代入等效转台模型进行空间目标回波建模,利用RD成像算法可以得到结合了轨道报和模型预测信息的仿真成像。
其中预测所得的位置信息作为散射点模型的等效中心位置信息,而根据几何关系以及等效转台理论,计算所得的每一时刻空间站相对模拟地面站的转角信息可以作为目标的等效旋转角度。为了进一步演示该方法,使用SGP4预测得到的信息进行目标成像,并使用几何关系计算所得等效转速进行定标。
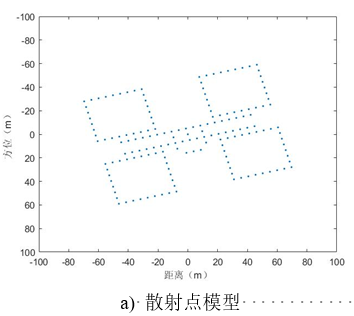
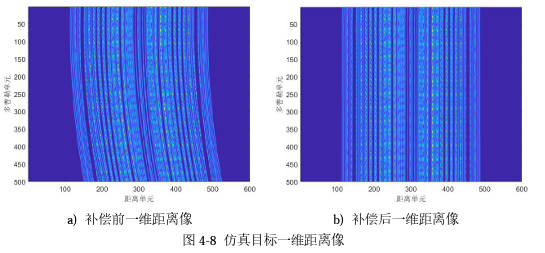
目标空间站散射点模型如图4-4 a)所示,在无噪声环境进行仿真,对目标回波信号进行距离压缩得到一维距离像如图4-8 a)所示,可以看到一维距离像的包络发生了偏移。使用积累互相关法和多普勒中心跟踪法进行运动补偿得到补偿后的一维距离像如图4-8 b)所示,一维距离像实现了距离向上的对齐。
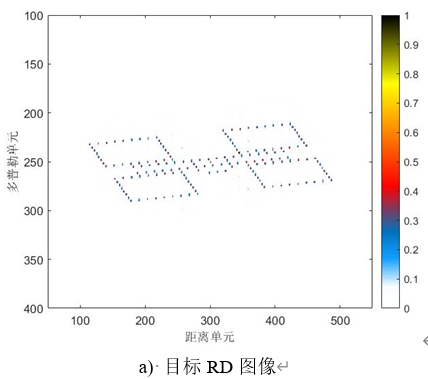
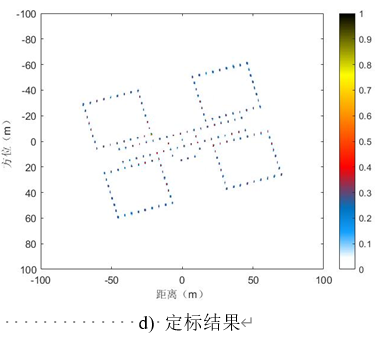
对目标回波信号进行ISAR成像获得目标的RD图像,如图4-9 a)所示。根据预测所得等效转速进行定标结果如图4-9 d)所示,基本恢复了散射点模型目标的真实尺寸。
结语
由结果可以看出依据SGP4模型成功的预测出了空间站对应时间段的等效转速,并根据相关预测到的空间站位置信息对散射点模型进行成像,并实现了定标处理。该方法在相关论文的实测数据验证中表现出了很有效的定标效果。作者下一节将进一步介绍基于参数估计法的ISAR成像定标方法,并进行仿真实验验证,本节针对空间目标利用轨道报预测模型所得等效抓转速可以作为参数估计法的辅助参考。
MATLAB仿真程序说明:实现SGP4模型预测空间目标位置信息,通过几何关系计算目标等效转速,实现仿真图像横向(方位维)定标。雷达方面的公开仿真程序极少,大多杂乱且无用,本程序包含个人付出,有用于参考和学习需要的请私聊。
ISAR成像定标方法研究专栏:
【ISAR成像定标方法(1)—转台目标的RD成像算法MATLAB仿真】
【ISAR成像定标方法(2)—平动目标ISAR成像的运动补偿方法MATLAB仿真】

















 423
423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









