







前言
由于C51芯片IO口有限,当需要控制更多外围设备时,需要对IO口进行扩展。通过74HC595芯片可以通过使用3个IO口,扩展出8个IO口(串转并)。
通过74HC595控制8*8的LED点阵实验,学习IO扩展。
一、74HC595及点阵原理
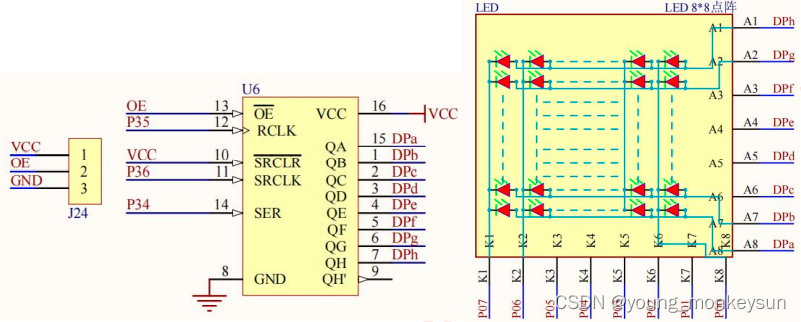
| 引脚 | 描述 |
|---|---|
| 10 | 低电平复位引脚(给低电平即清除数据复位) |
| 13 | 低电平输出有效(给低电平才有输出) |
| 14 | 串行数据输入 |
| 11 | 移位寄存器时钟输入 |
| 12 | 存储寄存器时钟输入 |
| 9 | 串行数据输出 |
| 1-7,15 | 并行数据输出 |
- 10引脚在51单片机中始终接高电平,即在51单片机中无法对74HC595复位 ,在实际编写程序中不用管该引脚。
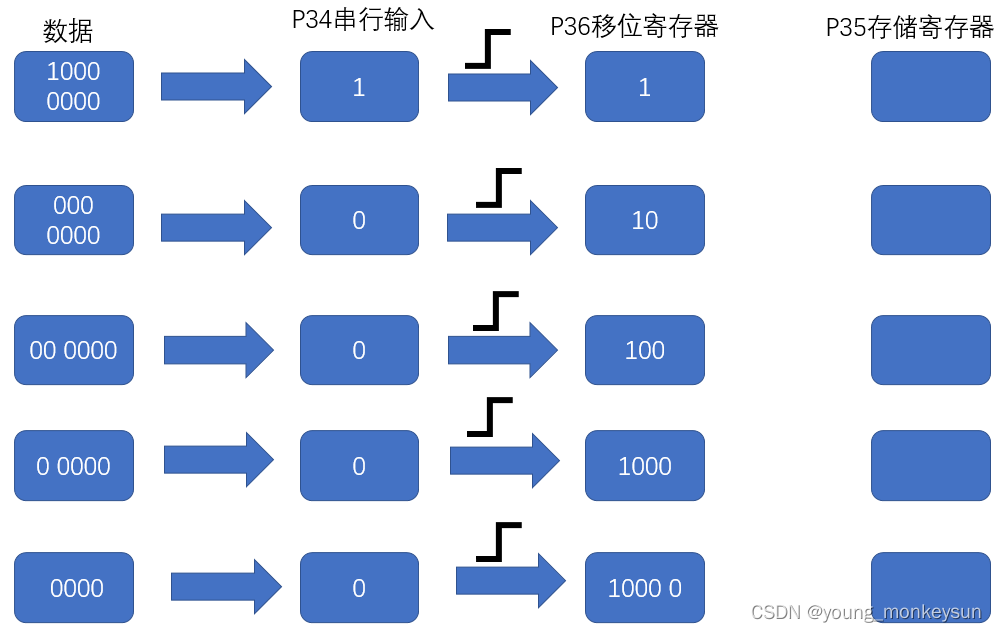
13引脚OE给低电平才能有输出,即原理图最左边将OE与GND连接。在51单片机实物中,将最右边数码管旁边的标号为J24的短接片插到左边。此时74HC595才能产生有效输出。- 在14引脚输入数据时,不能直接将十六进制数据赋值给P34。需要将数据一位一位的输入。以0x80为例,转换为二进制为1000 0000。需要从高位至低位依次获取每一位数据,将每一位数据赋值给P34。
- 在P34获取到一位数据后,给11引脚一个从低电平到高电平的上升沿,将数据写入移位寄存器。
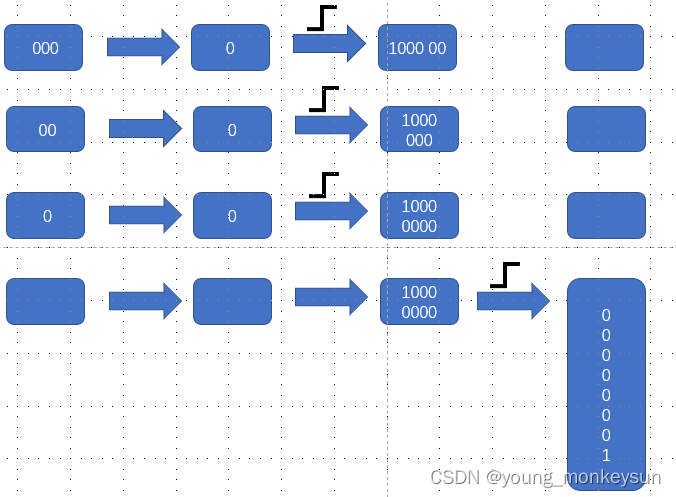
- 当将所有数据写入移位寄存器后,给12引脚一个从低电平到高电平的上升沿,将数据写入存储寄存器。此时在1-7,15引脚并行输出中才能获得数据。
6. 并行输出中15引脚为最低位,7引脚为最高位
二、点阵代码
1.时延文件
delay.h
#ifndef _DELAY_H__
#define _DELAY_H__
typedef unsigned int uint;
typedef unsigned char uchar;
/*10us=1,时延为10us*/
void delay_10us(uint _10us){
while(_10us--){}
}
/*1ms=1,时延为1ms*/
void delay_1ms(uint _1ms){
_1ms*=110;
while(_1ms--){
}
}
#endif
2.74HC595控制代码
Hc595_utils.h
#ifndef _HC595_UTILS_H
#define _HC595_UTILS_H
#include "reg52.h"
#include "delay.h"
sbit SHCP = P3^6; //移位寄存器时钟
sbit STCP = P3^5; //存储寄存器时钟
sbit SER = P3^4; //串行数据输入
/*写入数据到HC595芯片*/
void Write_2_Hc595(uchar dat){
uint i;
for(i=0;i<8;++i){
/*获取高位*/
SER = dat>>7;
/*获得除高位后的数据*/
dat<<=1;
/*产生SHCP电压上升沿*/
SHCP=0;
delay_10us(1);//时延10us
SHCP=1;//电压上升沿,写入移位寄存器
}
/*写入存储寄存器*/
STCP=0;
delay_10us(1);
STCP=1;//STCP上升沿,写入存储寄存器
}
/*显示8*8点阵的一张图像*/
void show_pic(uchar *pic){//传入一张图像的数组
uint j=100;
while(j--){//循环若干次,留足视觉暂存
uint i;
for(i=0 ; i<8;++i){//一张图有8个数据,
P0=~(0x80>>i);
/*写入数据到HC595*/
Write_2_Hc595(pic[i]);
/*位清零,消残影*/
delay_10us(1);
Write_2_Hc595(0x00);
}
}
}
#endif
3. 主函数
#include "Hc595_utils.h"
void main(){
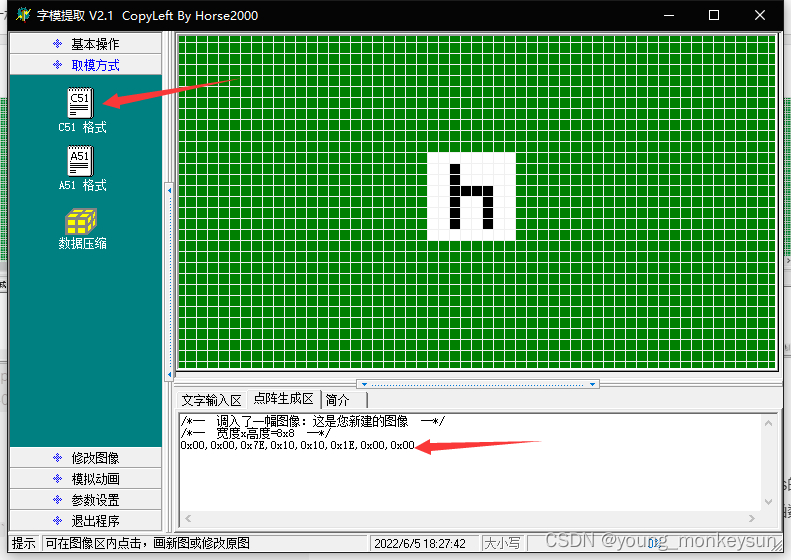
uchar pic[10][8]={{0x00,0x00,0x7E,0x10,0x10,0x1E,0x00,0x00},//h
{0x00,0x00,0x7C,0x54,0x54,0x74,0x00,0x00},//e
{0x00,0x00,0x79,0x09,0x09,0x7F,0x00,0x00},//y
{0x00,0x00,0x7E,0x50,0x50,0x50,0x00,0x00},//f
{0x00,0x3C,0x02,0x02,0x02,0x3C,0x00,0x00},//u
{0x00,0x3C,0x42,0x42,0x42,0x42,0x00,0x00},//c
{0x00,0x00,0x7E,0x18,0x24,0x42,0x00,0x00}, //k
{0x00,0x00,0x79,0x09,0x09,0x7F,0x00,0x00},//y
{0x00,0x3C,0x42,0x42,0x42,0x42,0x3C,0x00},//o
{0x00,0x3C,0x02,0x02,0x02,0x3C,0x00,0x00}//u
};
while(1){
uint i;
for(i=0 ; i<10;++i){
delay_1ms(100);
show_pic(&(pic[i]));
delay_1ms(100);
}
}
}
代码解释
- 数据类型须为
unsigned char类型?
因为如果为unsigned int类型无法正常显示。 P0=~(0x80>>i)?
74HC595控制8*8LED点阵的行,P0控制点阵的列。以pic[10][8]中的任意一行为例,一行中的数据有8个元素,第一个元素表示选中第一列进行显示,第一列的如何显示由第一个元素的值即595的输出控制。以此类推。
以i=1为控制第二列显示,0x80转换为二进制为1000 0000 , 0x80>>1表示右移1位,即为0100 0000。取反码为1011 1111。赋值给P0即表示第二列为低电平,由LED管的方向可知,为低电平时有效,即控制第二列进行显示。至于如何显示,则由Write_2_Hc595(pic[i]);中的pic[i]控制。
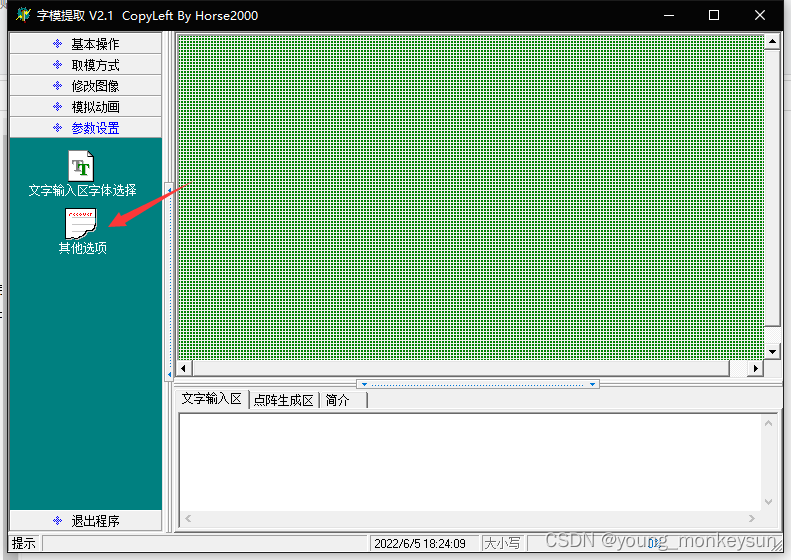
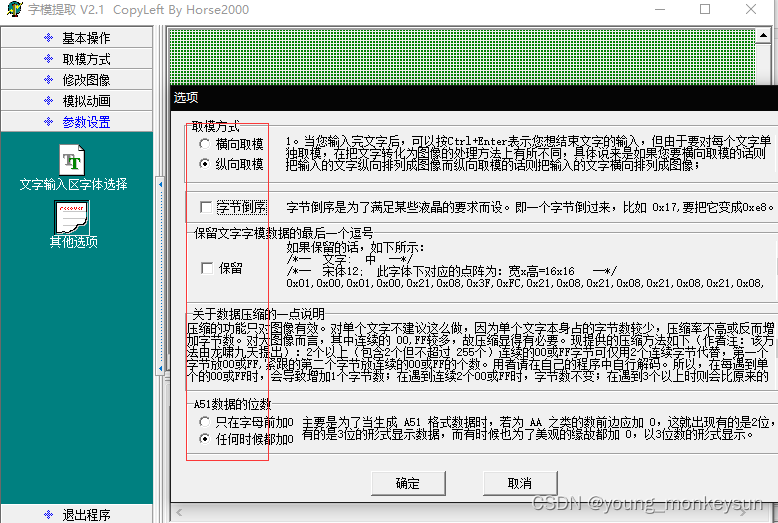
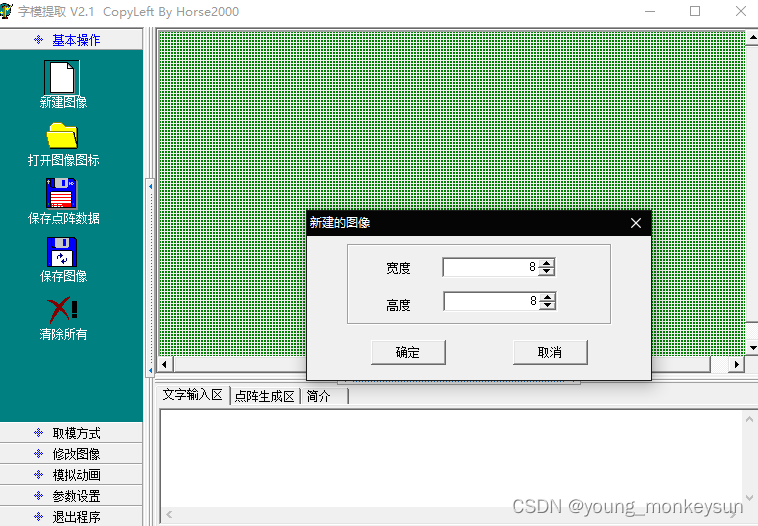
三、如何获取点阵的行显示数据?
总结
如何控制点阵不重要,如何学会看芯片文档,如何进行IO扩展很重要

















 2702
2702

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









