




文末获取完整仿真源文件+使用说明

1.了解单容液位定值控制系统的结构与组成。
2.掌握单容液位定值控制系统调节器参数的整定方法。
3.了解P、PI、PD和PID四种调节器分别对液位控制的作用。

单回路控制:
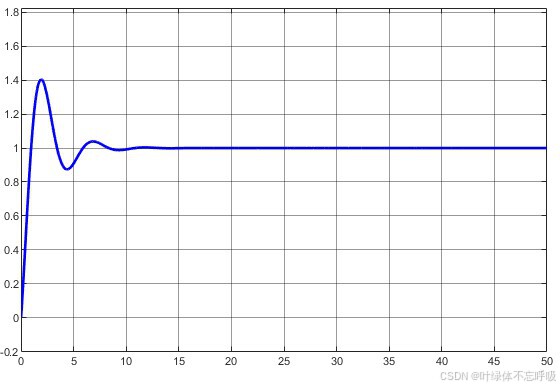
仿真设置:P=98,I=1,D=49,阶跃开始时间设为0,停止时间设为50
p=1000,观察到响应曲线为高频震荡,衰减幅度较小以0.5倍率衰减p,直至p=100,观察到响应曲线有明显衰减,衰减比大约为5:1,且衰减频率降低,开始调节I,先置I=1000,观察到响应曲线为不稳定震荡,以0.1倍率衰减I,直至I=1,响应曲线为衰减曲线,衰减比大约为4.5:1开始调节D,以达到衰减比4:1的效果,先以+5的速率从D=0增加D,D=50时接近4:1,接着再次降低速度缓慢调节当D=49,P=98时,衰减比大约为4:1,整定完成。
PID对系统稳定性的影响:
P:比例系数 增大可以加快响应速度,减小系统稳态误差,提高控制精度。但是 过大会产生较大超调,甚至导致不稳定;若 取得过小,能使系统减少超调量,稳定裕度增大,但会降低系统的调节精度,使过渡过程时间延长。
I:积分调节可消除系统的静态误差,适用于有自平衡性的系统。加大积分系数 有利于减小系统静差,但过强的积分作用会使超调量加剧,甚至引起振荡;减小积分系数 虽然有利于系统稳定,避免振荡,减小超调量,但又对系统消除静态误差不利。
D:微分调节作用主要是针对被控对象的惯性改善动态特性,它能给出响应过程提前制动的减速信号。它有助于减小超调,克服振荡,使系统趋于稳定;同时加快系统的响应速度,减小调节时间,从而改善了系统的动态特性。 的值对响应过程影响非常大。若增加微分作用 ,有利于加快系统响应,使超调量减小,增加稳定性,但也会带来扰动敏感,抑制干扰能力减弱,若 过大则会使响应过程过分提前制动从而延长调节时间;反之,若 过小,调节过程的减速就会滞后,超调量增加,系统响应变慢,稳定性变差。


















 1425
1425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











