






这个Motor Control Workbench(MCSDK)其实是很适合小白做开发的,一套流程配置下来就可以简单的先把电机跑起来,它里面提供的Pilot控制面板还有不同的控制以供选择,位置控制、速度控制、转矩控制。让电机控制变得没有那么高冷!新版本的MCSDK比5.Y的版本界面美观一些。
准备
用到的软件如下:
- Motor Control Workbench 6.2.0
- STM32CubeMX 6.9.2
- Keil5 (IAR EWARM 或者 STM32CubeIDE)
- STM32 FirmwarePackage V1.5.1
st的这几个软件都可以在官网上直接下载,具体安装教程应搜一搜就有了。
X-CUBE-MCSDK - STM32 Motor Control Software Development Kit (MCSDK) - STMicroelectronics
用到的硬件如下:
- EVSPIN32G4
- 电机
- 电源
MCSDK建立工程
接下来开始建立工程!
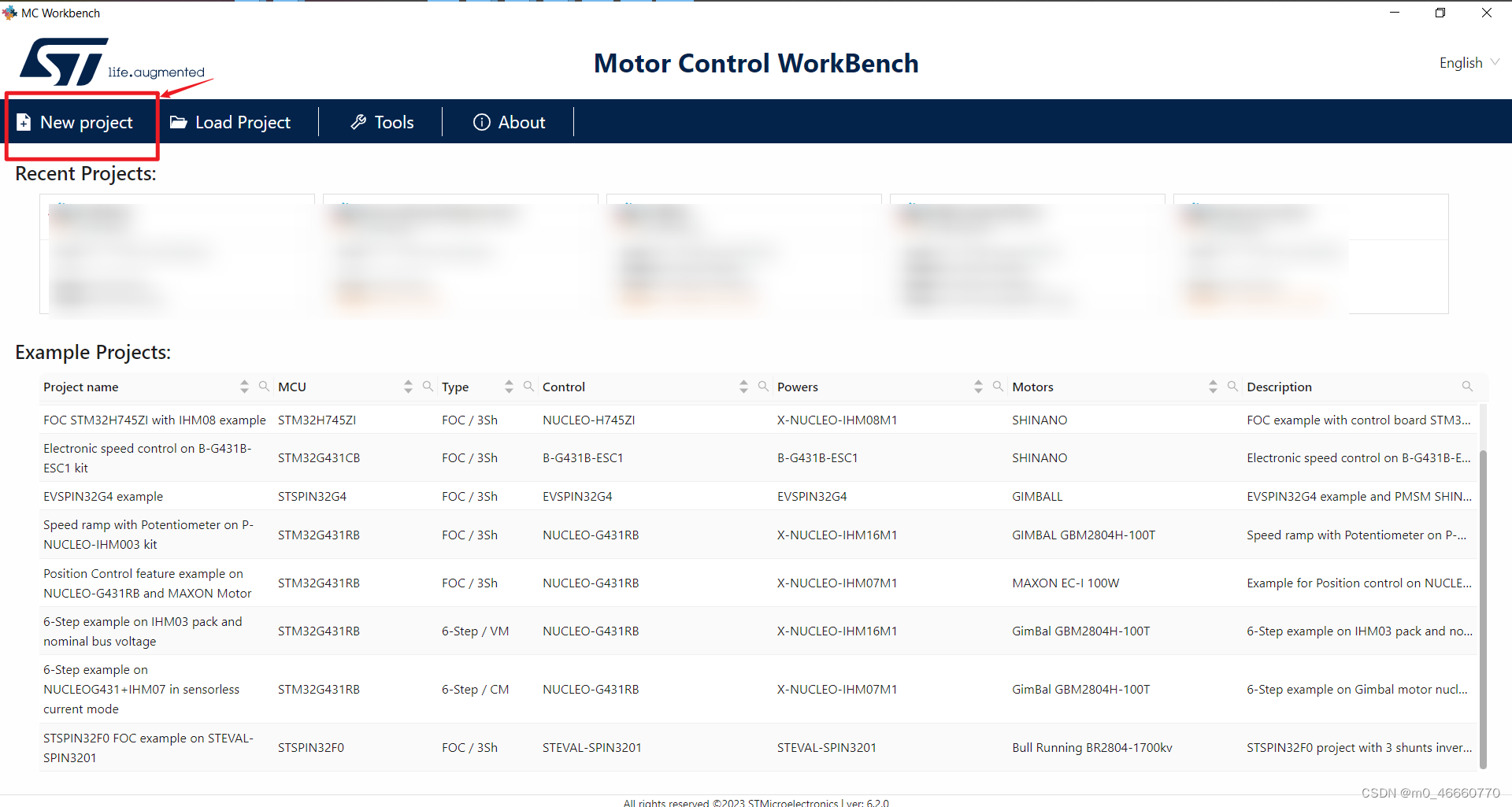
1. 新建一个MCSDK的Project。

填入我们项目的名称然后填入电机和驱动的信息
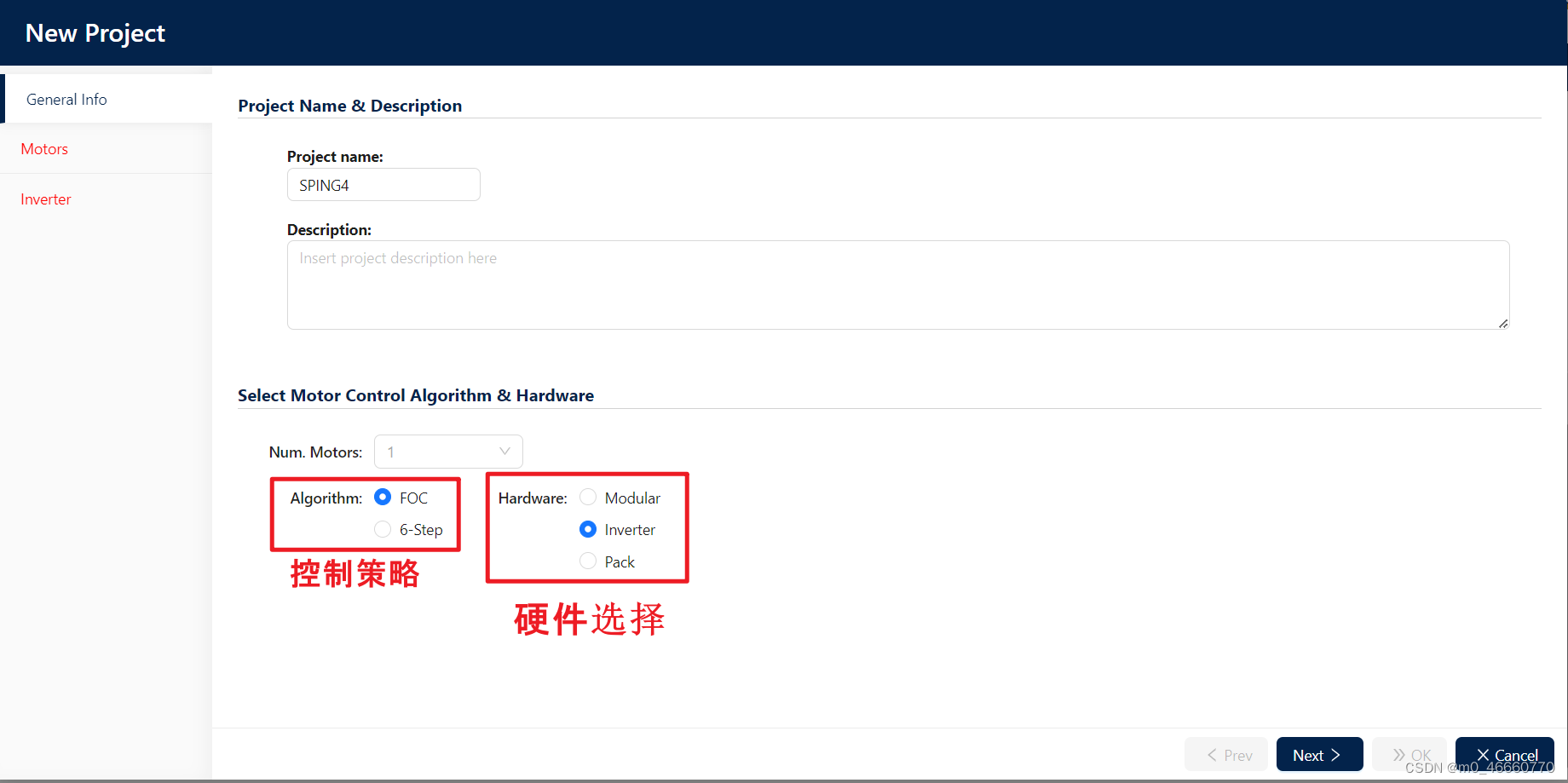
电机搜索不到符合自己电机型号的没关系,随便选一个,一会儿可以自定义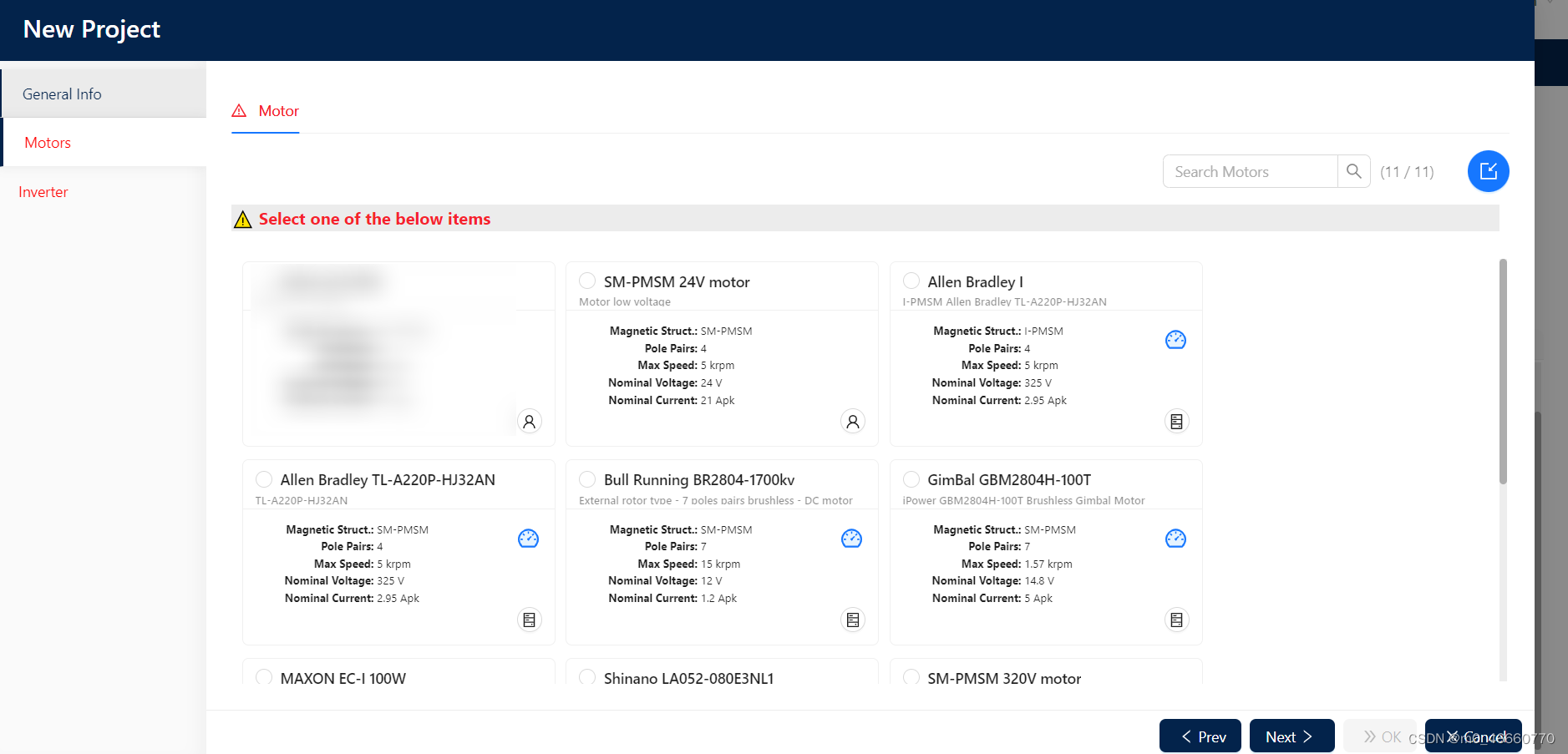
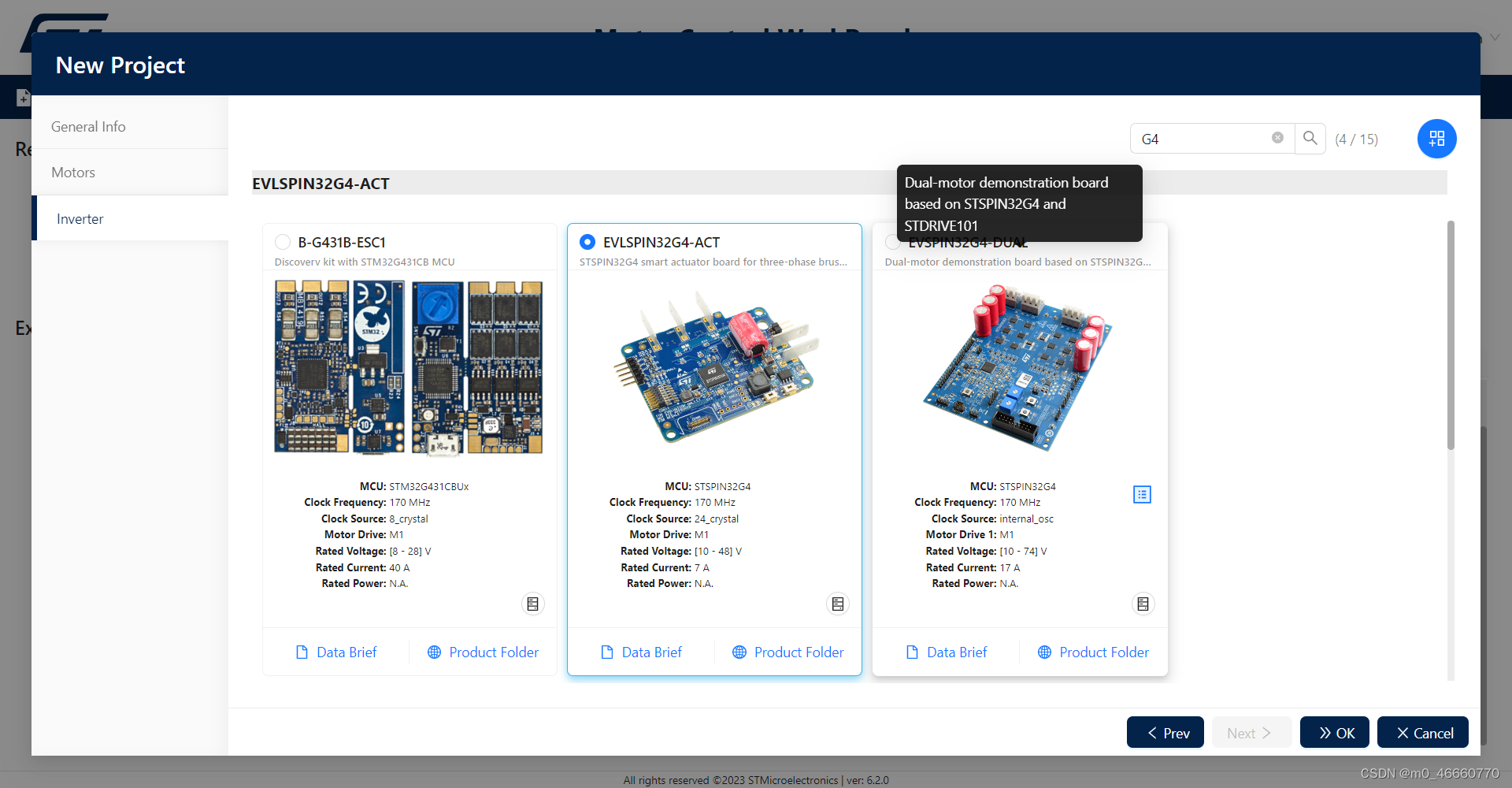
我这里用的是SPIN32G4,就直接选好了。如果驱动板是自己做的,需要自定义驱动器的要先用JSON格式去自定义,这个可以搜一下教程(使用MCSDK 6.x.0 自定义驱控板_cube mcsdk6-CSDN博客)
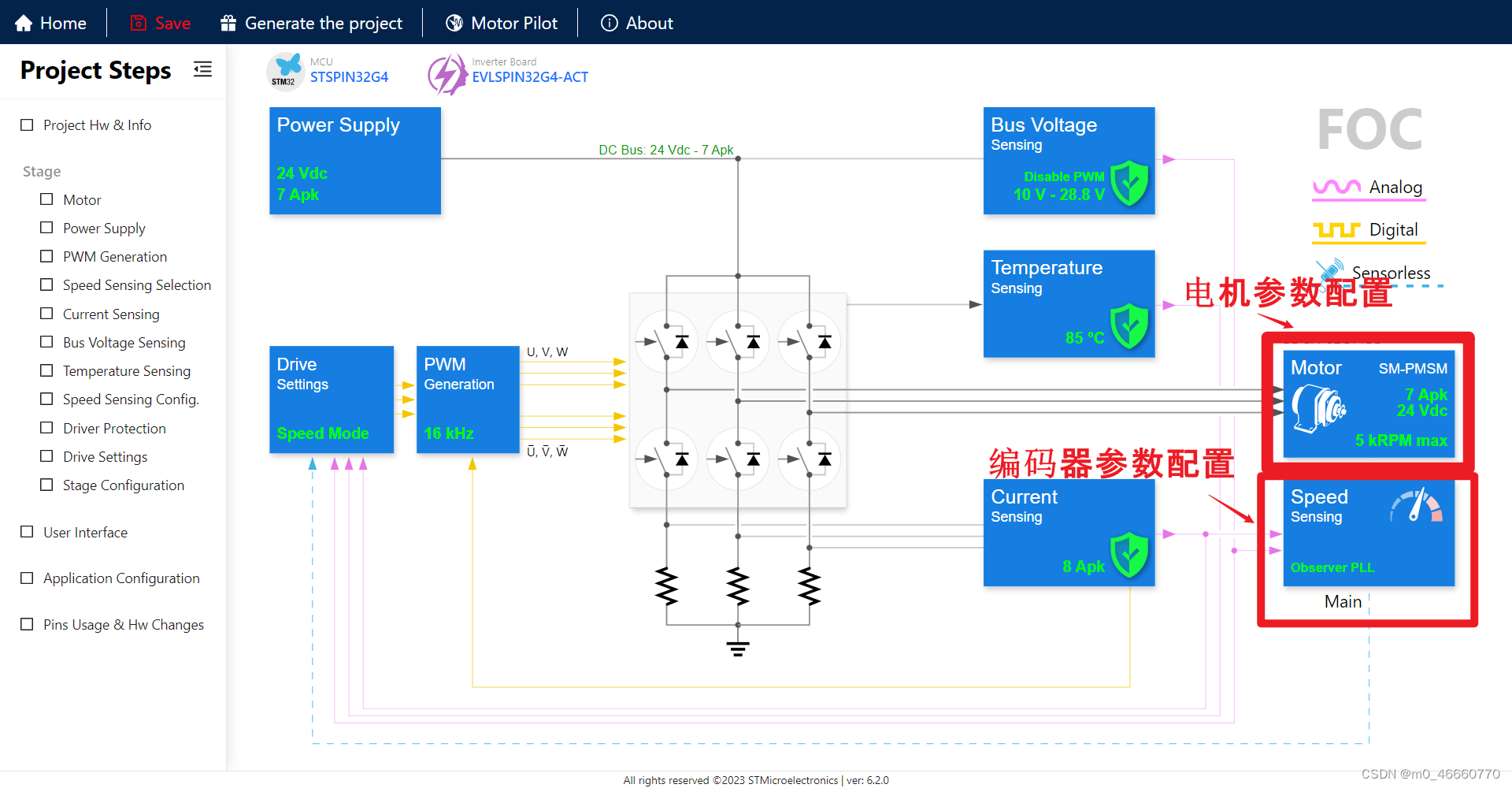
全部选好以后就进入到这个控制框图界面,这里就可以对电机、编码器参数进行配置,按照实际情况填写就好,st有个sensorless模式,没有编码器就可以选这个
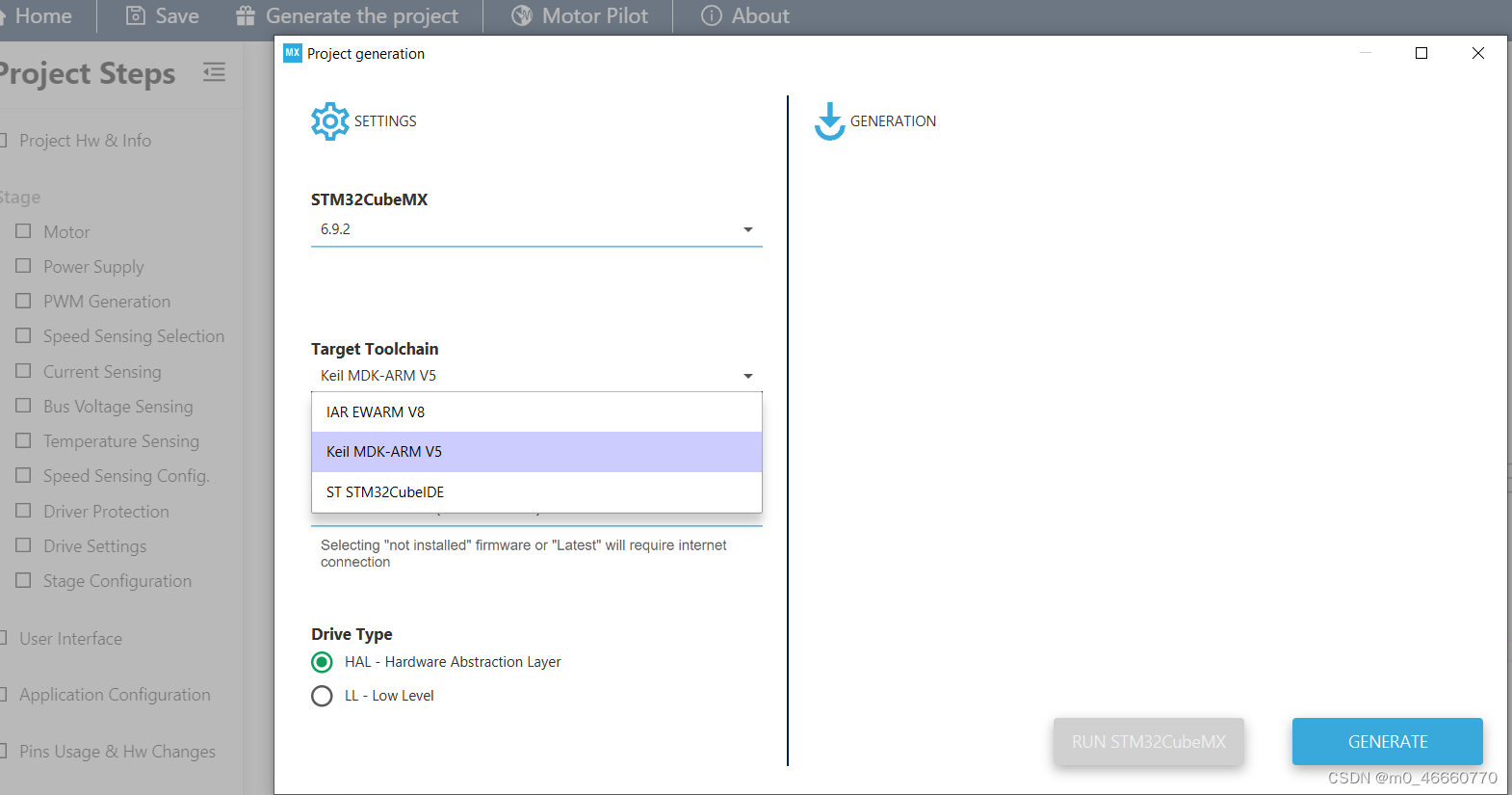
 全部信息填写完成以后就可以电机左上角的Generate the project进行代码生成。这里编译器是可选的,怎么方便怎么来吧。选好就按右下角的生成键
全部信息填写完成以后就可以电机左上角的Generate the project进行代码生成。这里编译器是可选的,怎么方便怎么来吧。选好就按右下角的生成键
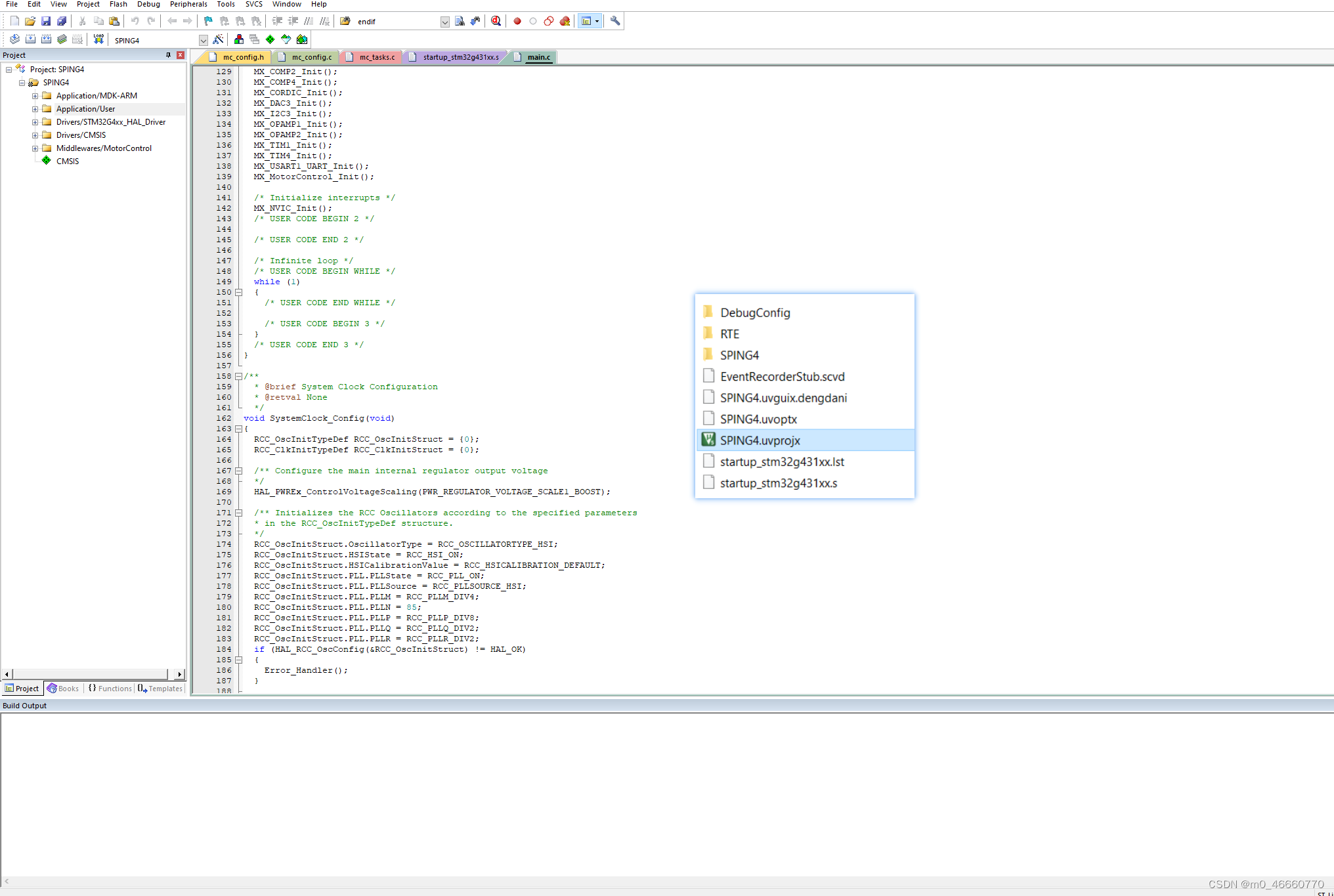
生成成功就会有一个以项目名称命名的文件出现,双击文件就有以下内容,
KEIL5代码的编译和烧录
打开MDK-ARM,接下来就是编译和烧录的工作了
(Keil5也要下载和MCU对应的固件包,如果没下就按照提示去官网下载,我这里是下好了
烧录之前要设置软件包,否则会出现问题,具体怎么做可以参考下面这个链接
(已解决)Error: Flash Download failed - “Cortex-M4“-CSDN博客
Motor Pilot让电机转起来
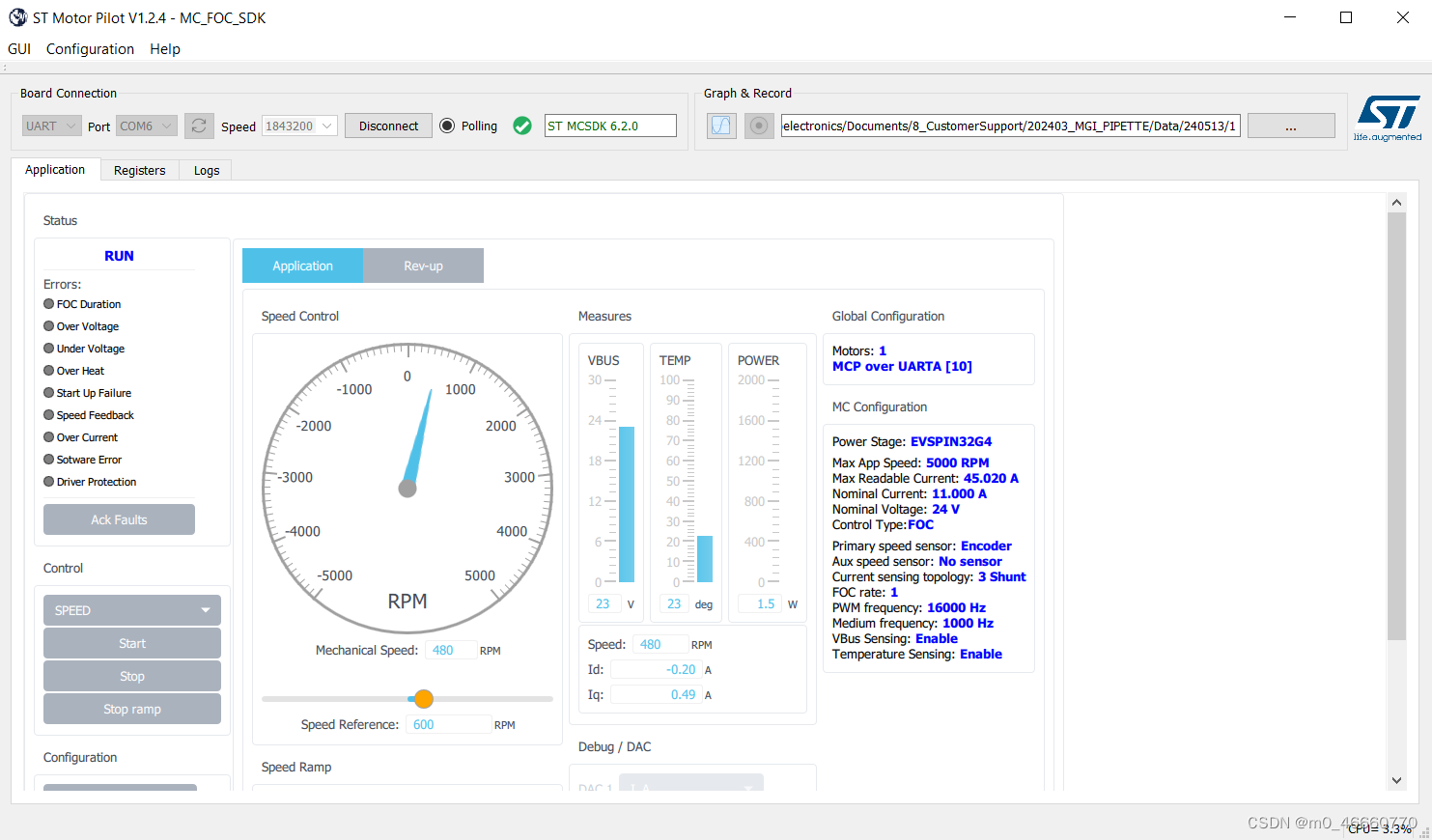
成功烧录到板子以后,点Run,就可以使用Motor Pilot这个可视化控制界面让电机跑起来了。

使用Motor Pilot 之前记得先改好COM口和波特率,波特率去代码里面搜baut rate就能找到。
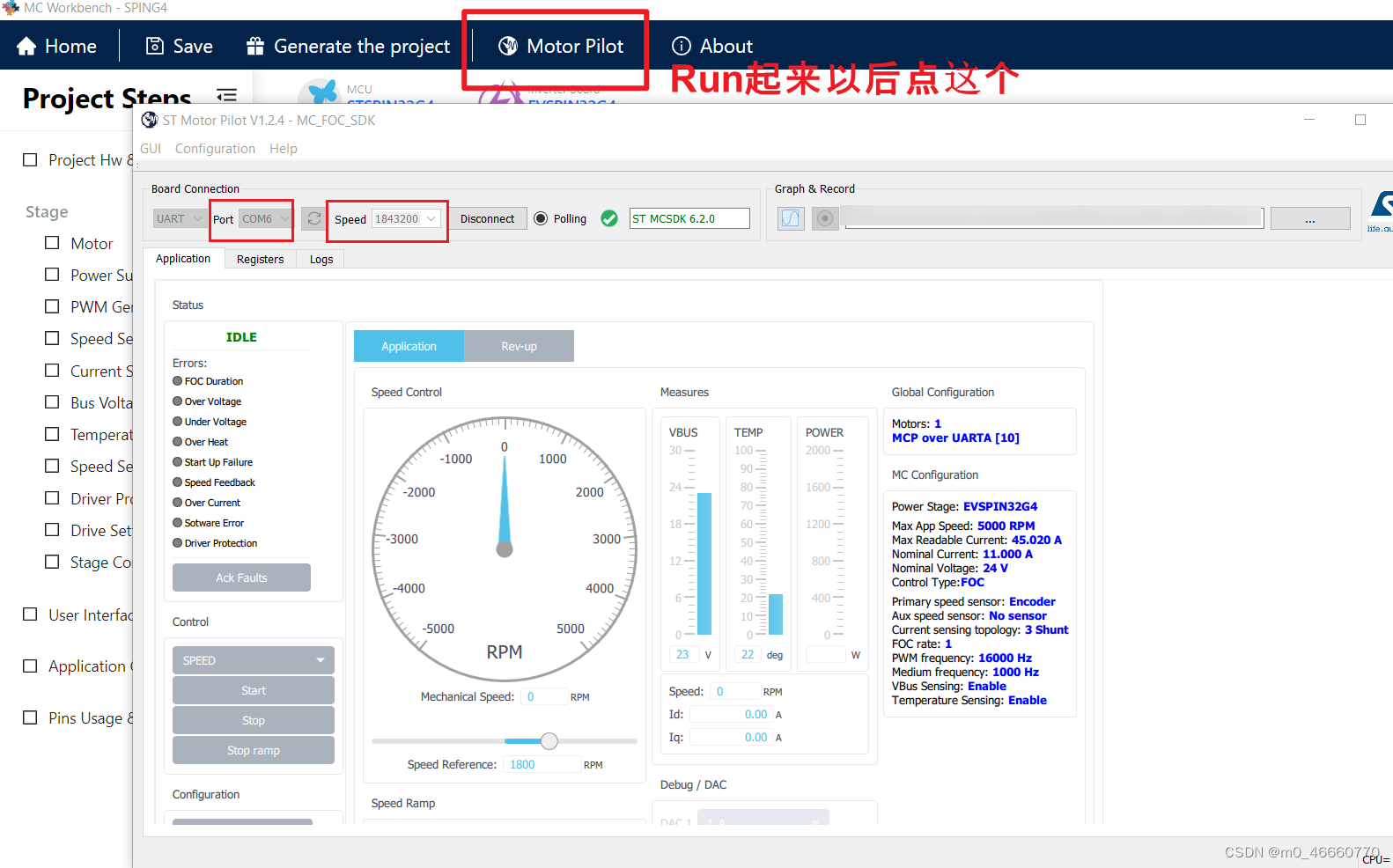
这里就是速度环成功跑起来了,面板能看到实时的速度、电流、角度等信息
OVER!

















 1533
1533

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









