






目录
前言
好久没有玩ST的电机库了,已经更新到了MotorControl Workbench 6.2.1,6以上的版本比5的版本界面操作有很大的不同,核心算法有些增加。最近体验了一把使用自定义硬件配置生成代码运行,感受就是如果用官方的硬件,直接配置更容易,但是使用自己的硬件,配置起来就比较麻烦,这里总结一下遇到的一些坑。
主要用到的软件:
cubemx 6.10.0
MCSDK 6.2.1
Keil V5
硬件:
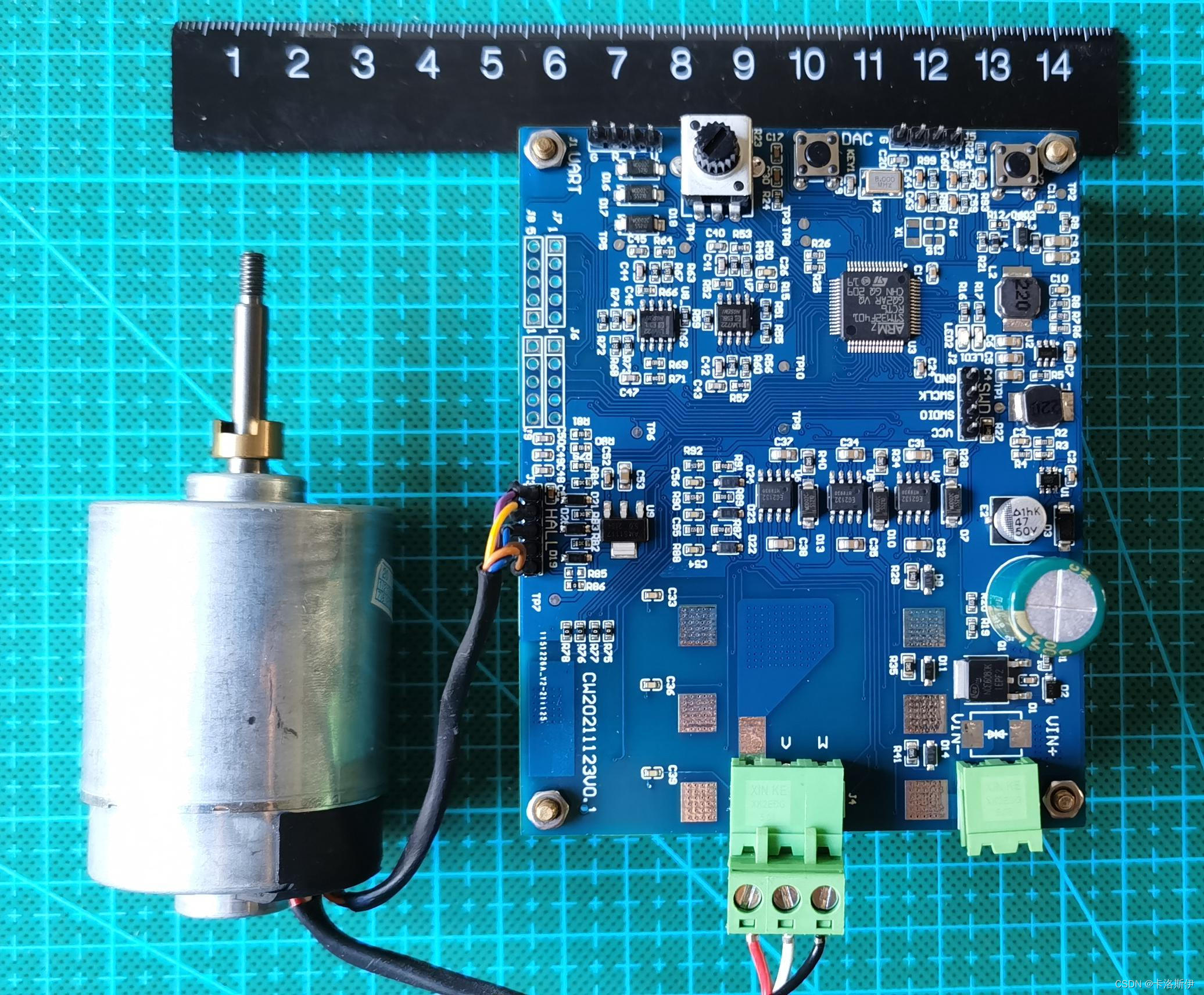
自己设计的Demo板
软件安装
这一步没啥好说的,无脑安装就行了,安装好后桌面上会有这几个软件,分别是CubeMX, Keil, MCSDK6.2, 还有一个上位机。

根据自己硬件配置参数
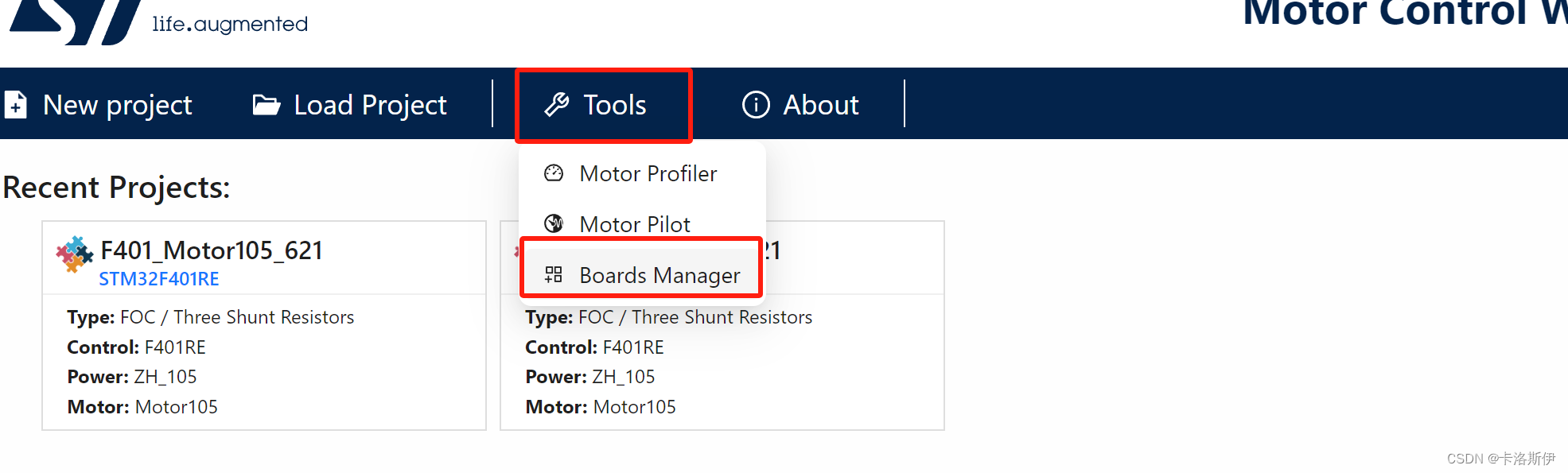
这一步不像是5.x的版本,可以自定义硬件,用起来会更麻烦。先在Tools里配置自己的硬件。
核心就是配置自己的功率板和控制板,因为Demo板是自定义的 ,功率和控制都整合在一起了,所以需要做一些调整,除此之外采样电阻,运放增益,母线电压分压比等需要根据实际进行配置。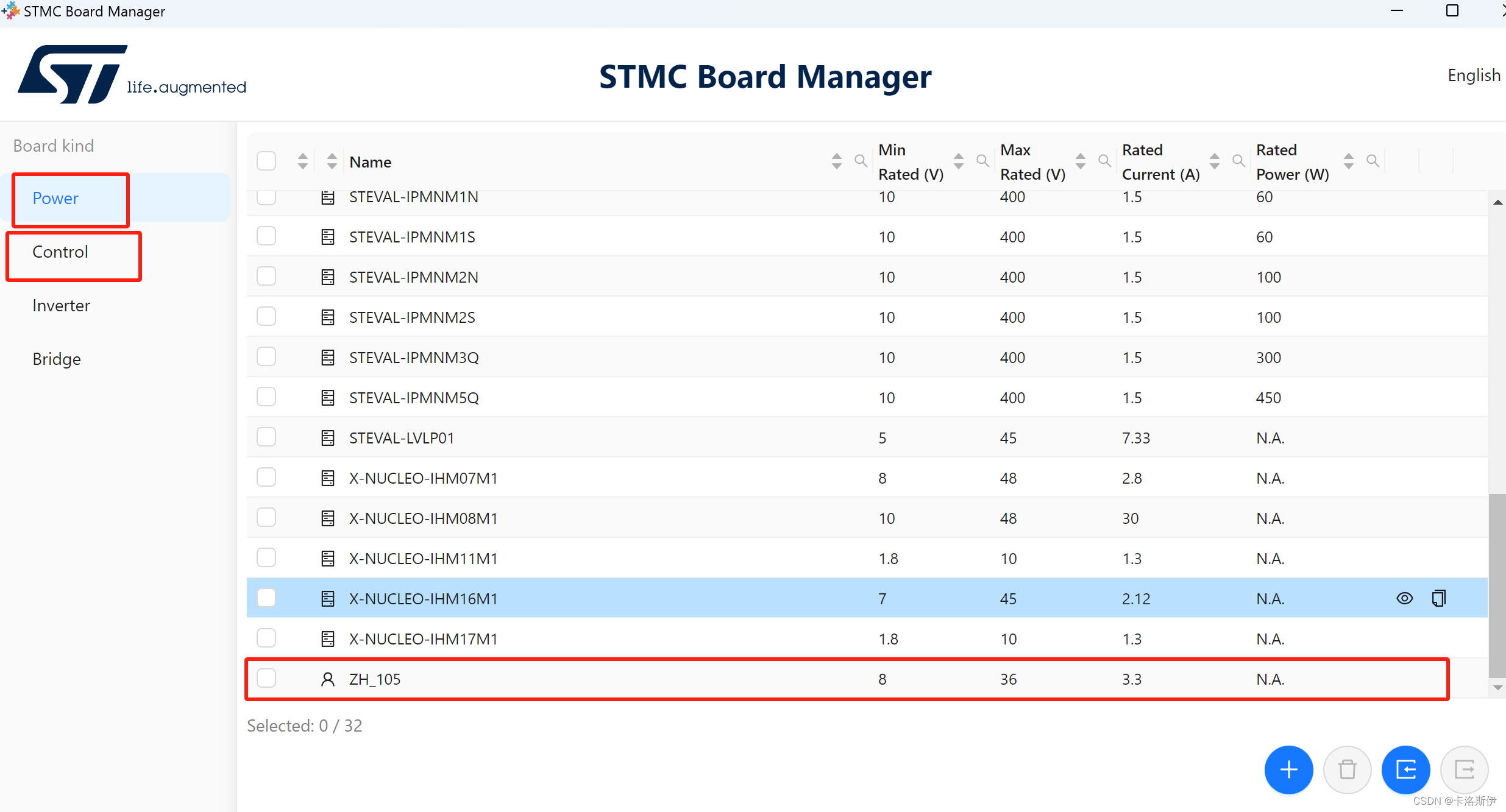
不像老版本可视化配置,还可以自动计算增益。这里需要用脚本来编辑,如下脚本的代码量不是很多,Power部分主要配置运放,发波频率,发波极性,分压,温度等,代码很容易能看懂。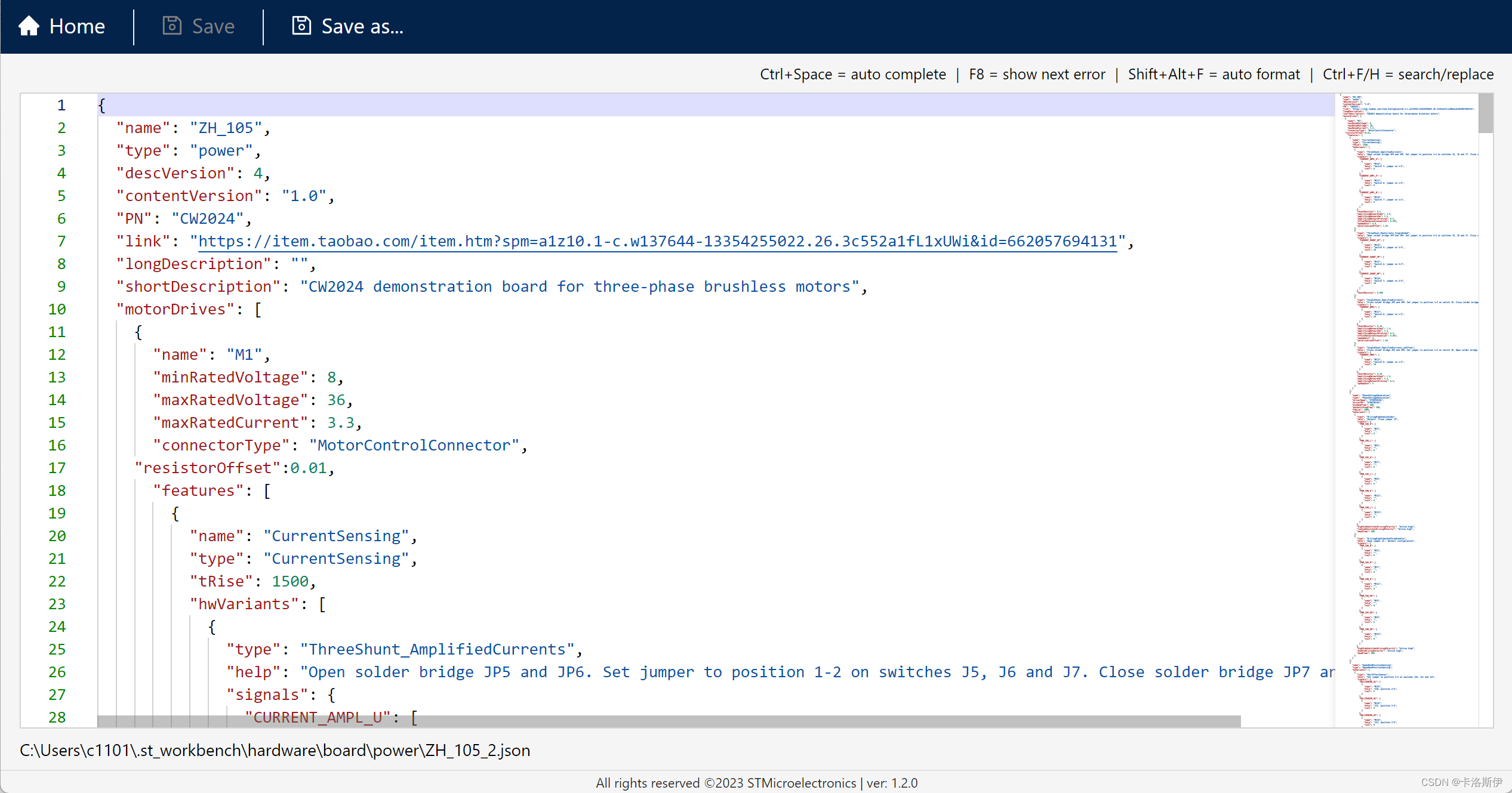
Control部分也一样,主要配置引脚功能,通道,芯片型号等。配置好后就可以开始整合了。
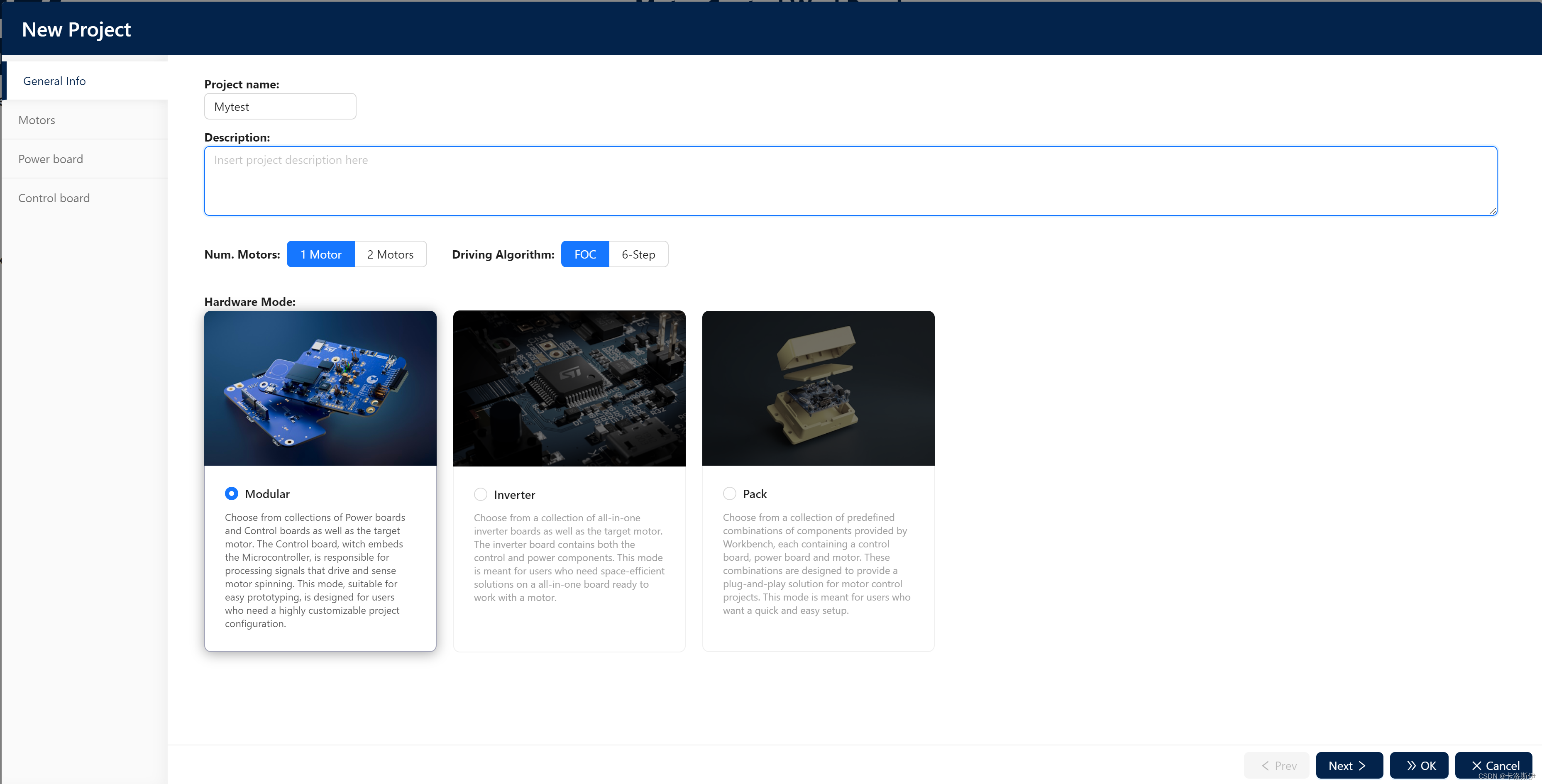
1.设置项目名,选择电机类型控制方式
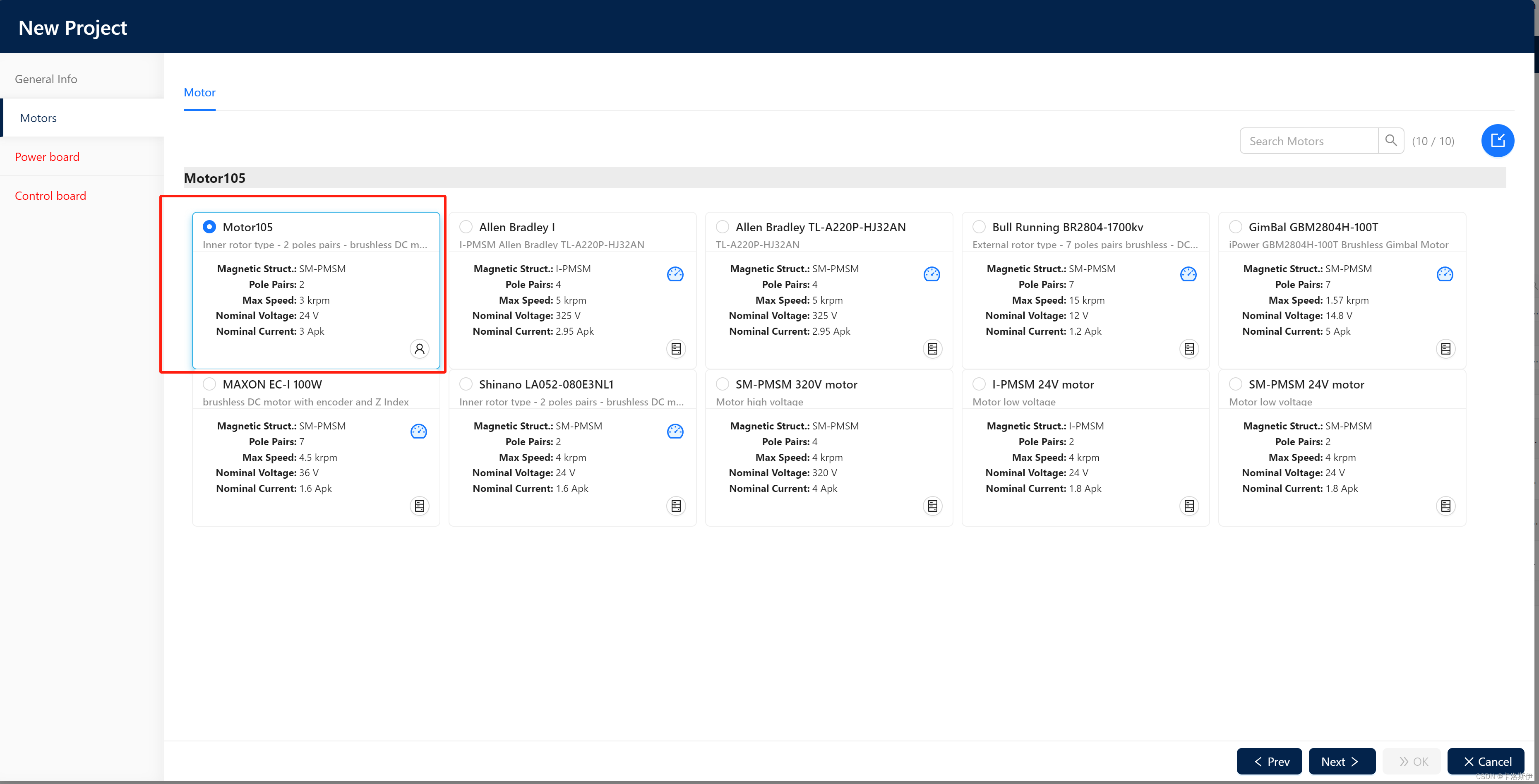
2. 选择电机,这一步可以随便选择一个,后面再配置,配置好自己的电机后会在这里出现可选的电机。
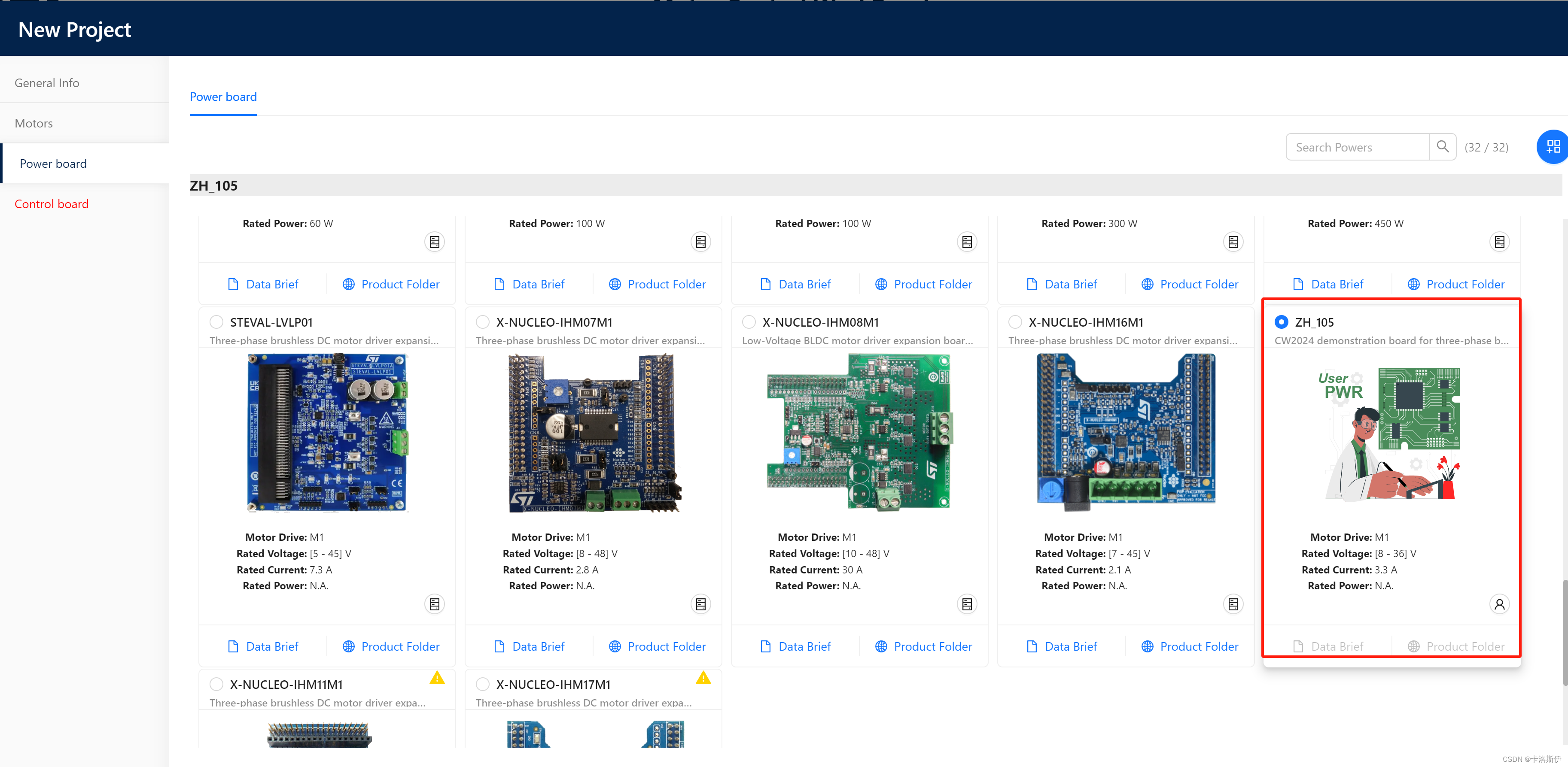
 3.前面通过脚本配置了自己的板子后,就可以在功率板这里找到相应的配置信息,并可以选择,不然只能选官方的。
3.前面通过脚本配置了自己的板子后,就可以在功率板这里找到相应的配置信息,并可以选择,不然只能选官方的。
4. 控制板也是如此,可以选中。
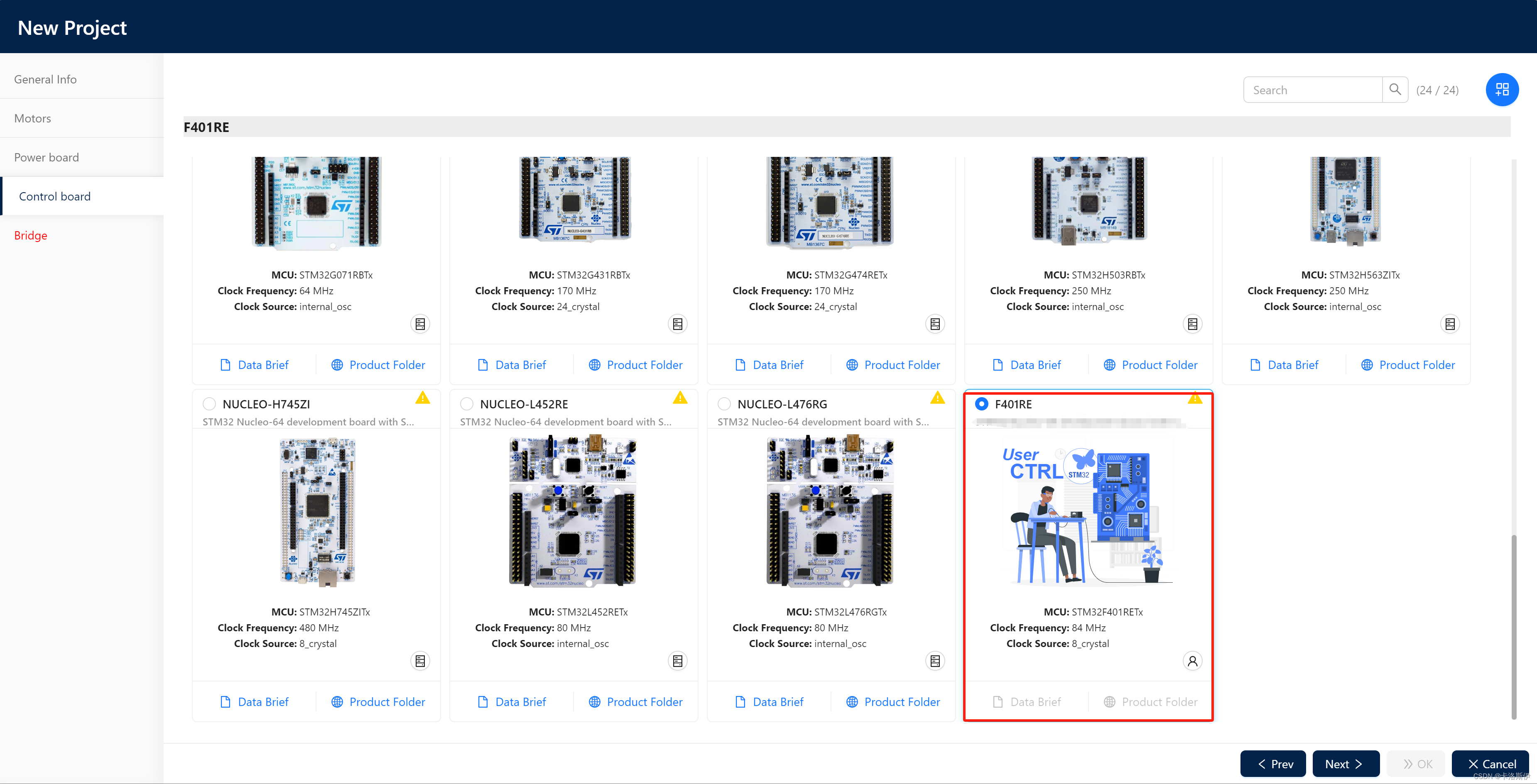
最后的Bridge根据自己的需要可以在配置控制板的时候设置是否需要,不需要的话就不会有这个选项。
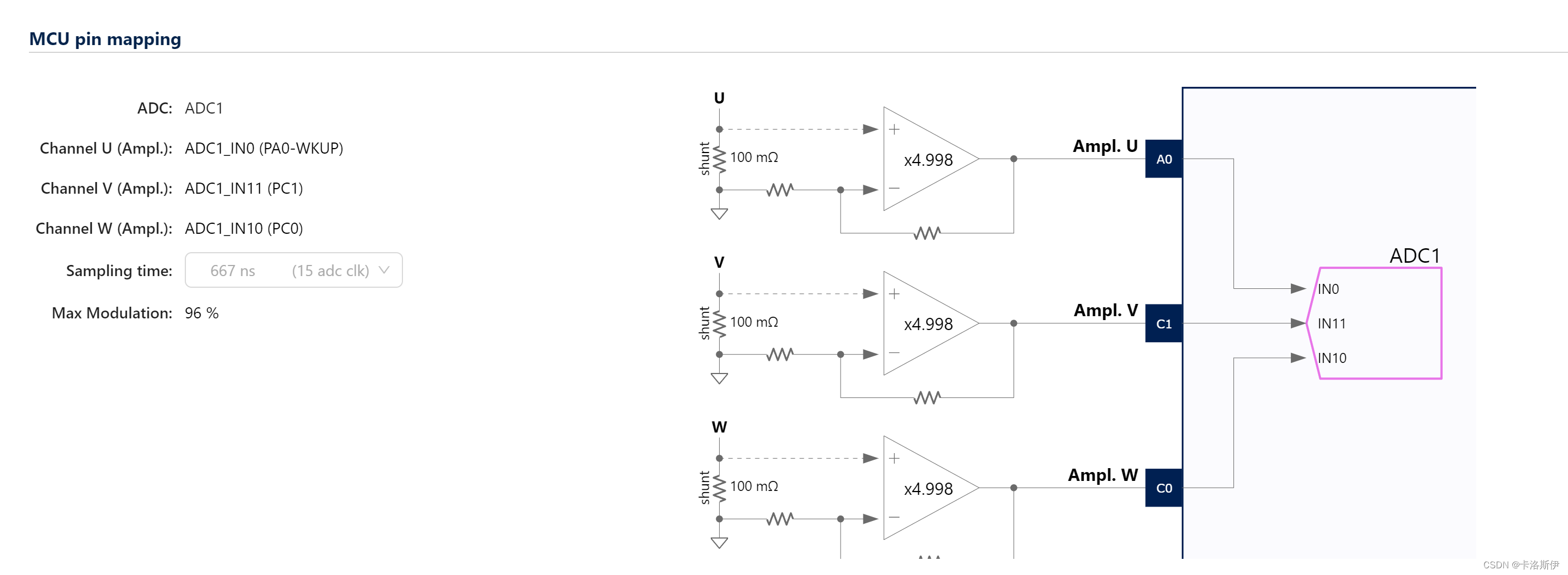
一切配置好后就来到了这个界面,在这里就和之前的版本一样了,选择传感器,配置启动参数,电机等,无非就是位置不一样了。
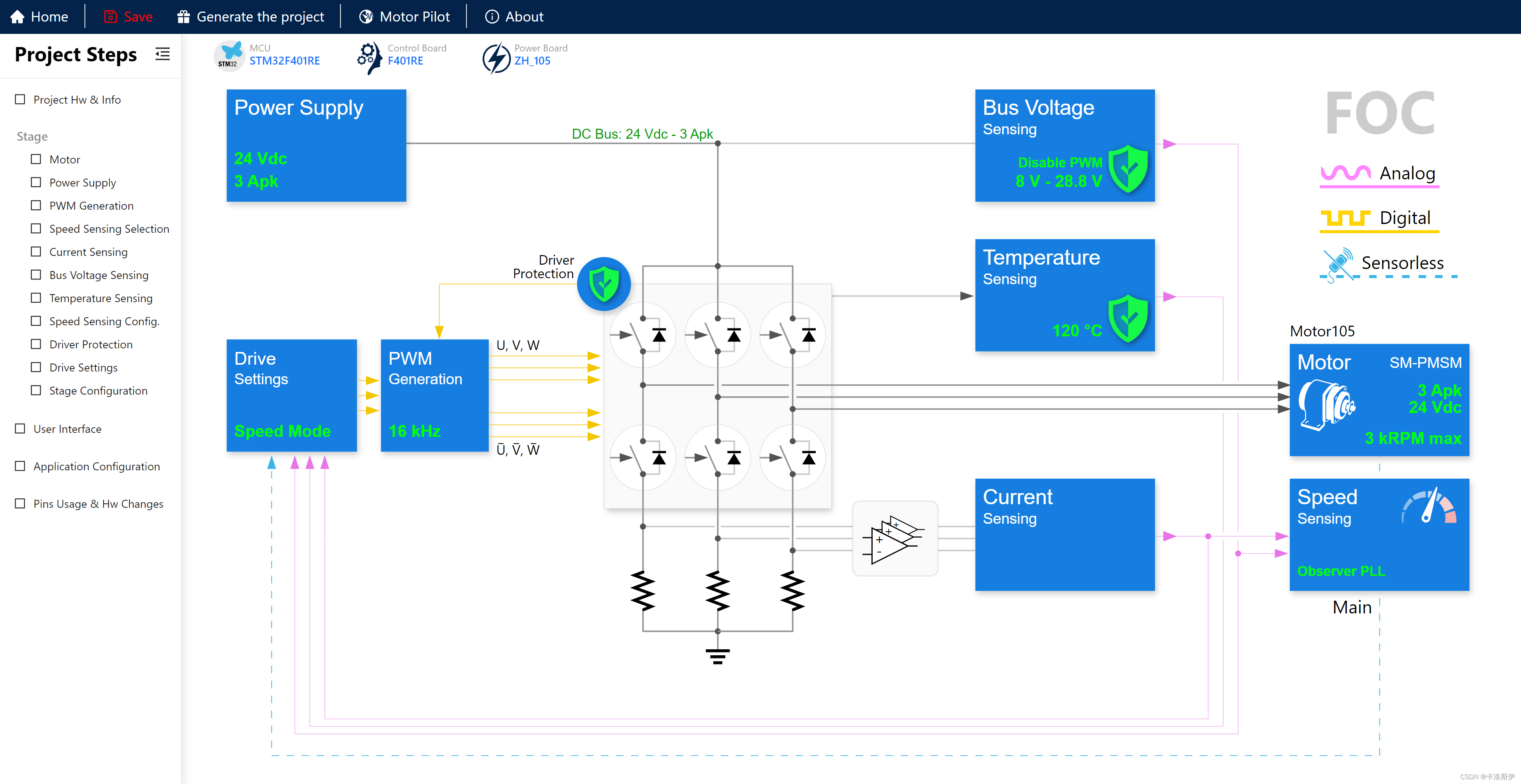
可以看到电流的采样通道,运放增益和自己硬件配置的就一样了。其他母线电压采样也是如此,具体的配置细节这里不多说,内容比较多,这里先把流程搞通。
生成代码
根据使用的工具链生成代码,千万不要用中文路径,不然会报错。
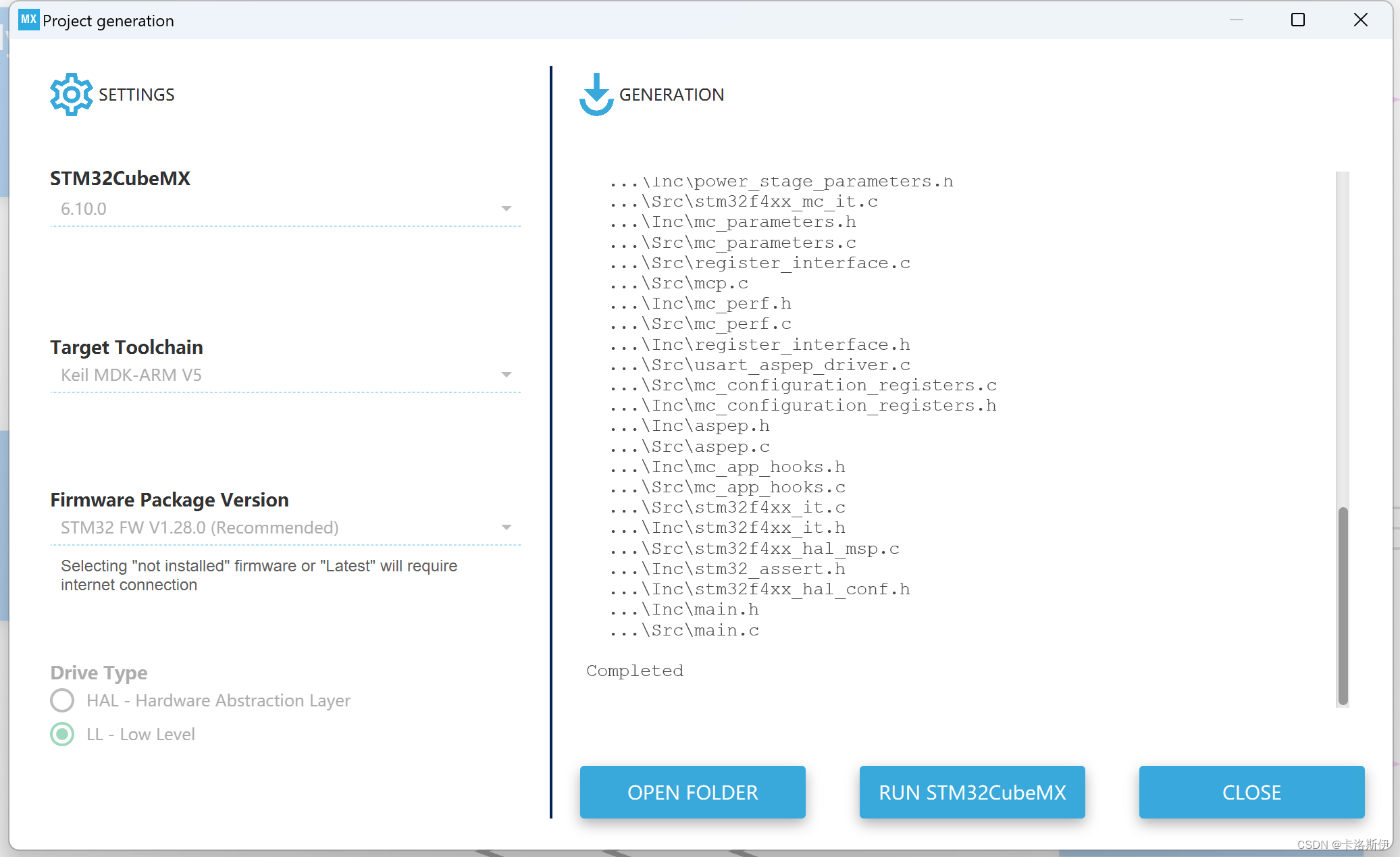
打开软件目录,一个是配置信息,一个是生成的Keil软件工程。进入软件目录,打开Keil的工程文件就可以编译了。

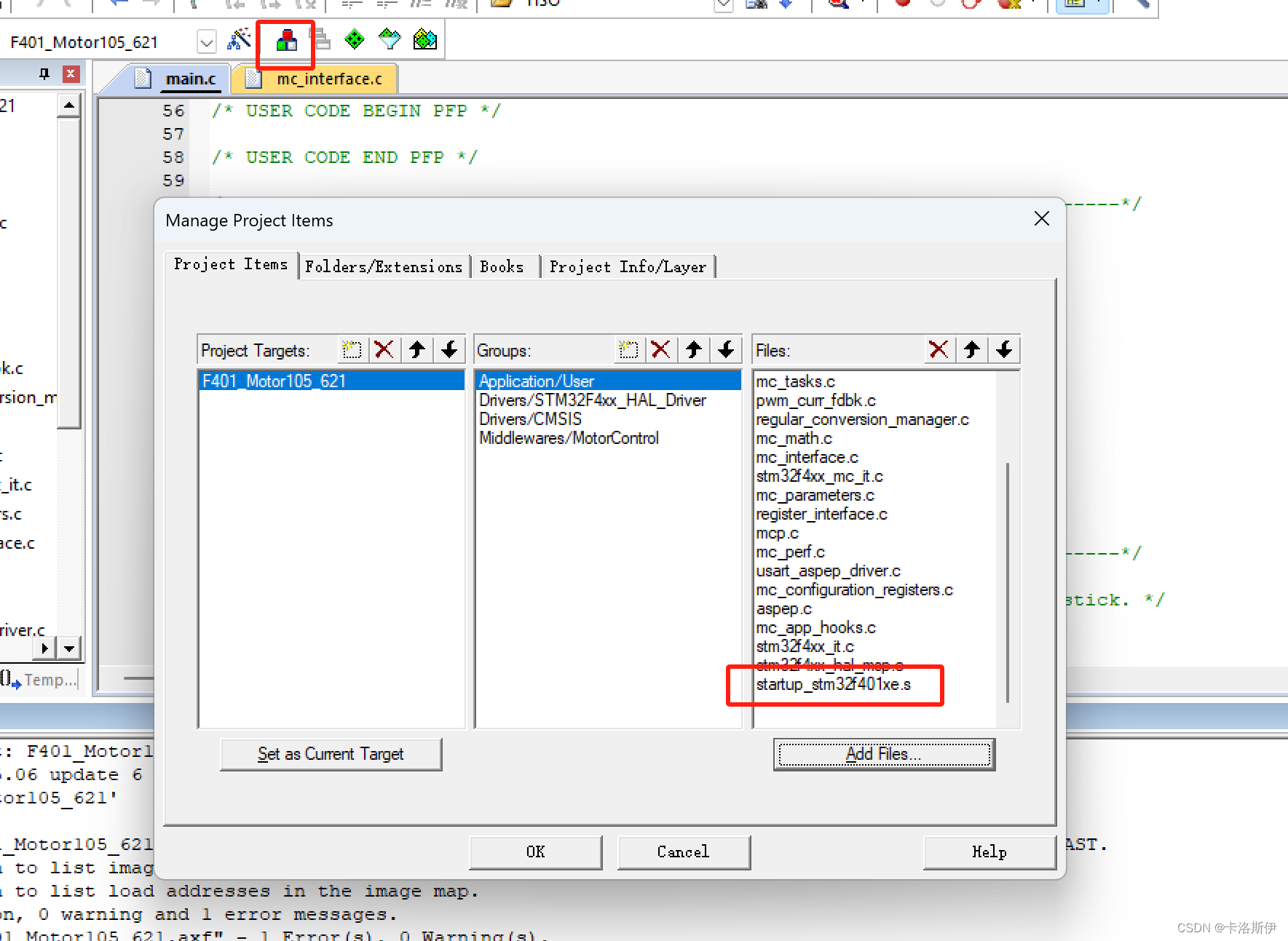
编译报错了,添加下图的汇编文件即可。
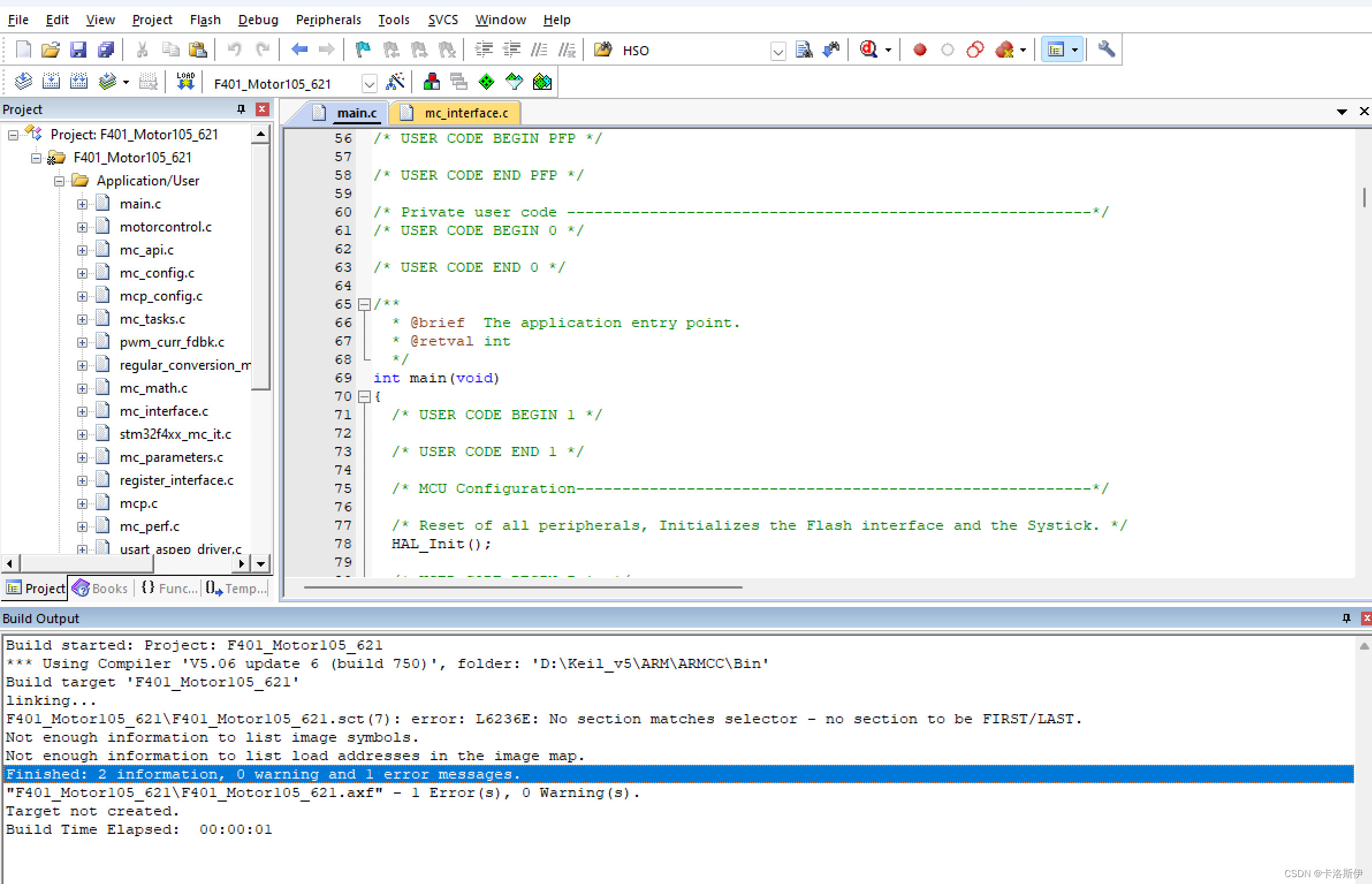
Not enough information to list image symbols.
Not enough information to list load addresses in the image map.
Finished: 2 information, 0 warning and 1 error messages.
"F401_Motor105_621\F401_Motor105_621.axf" - 1 Error(s), 0 Warning(s).
开发板运行
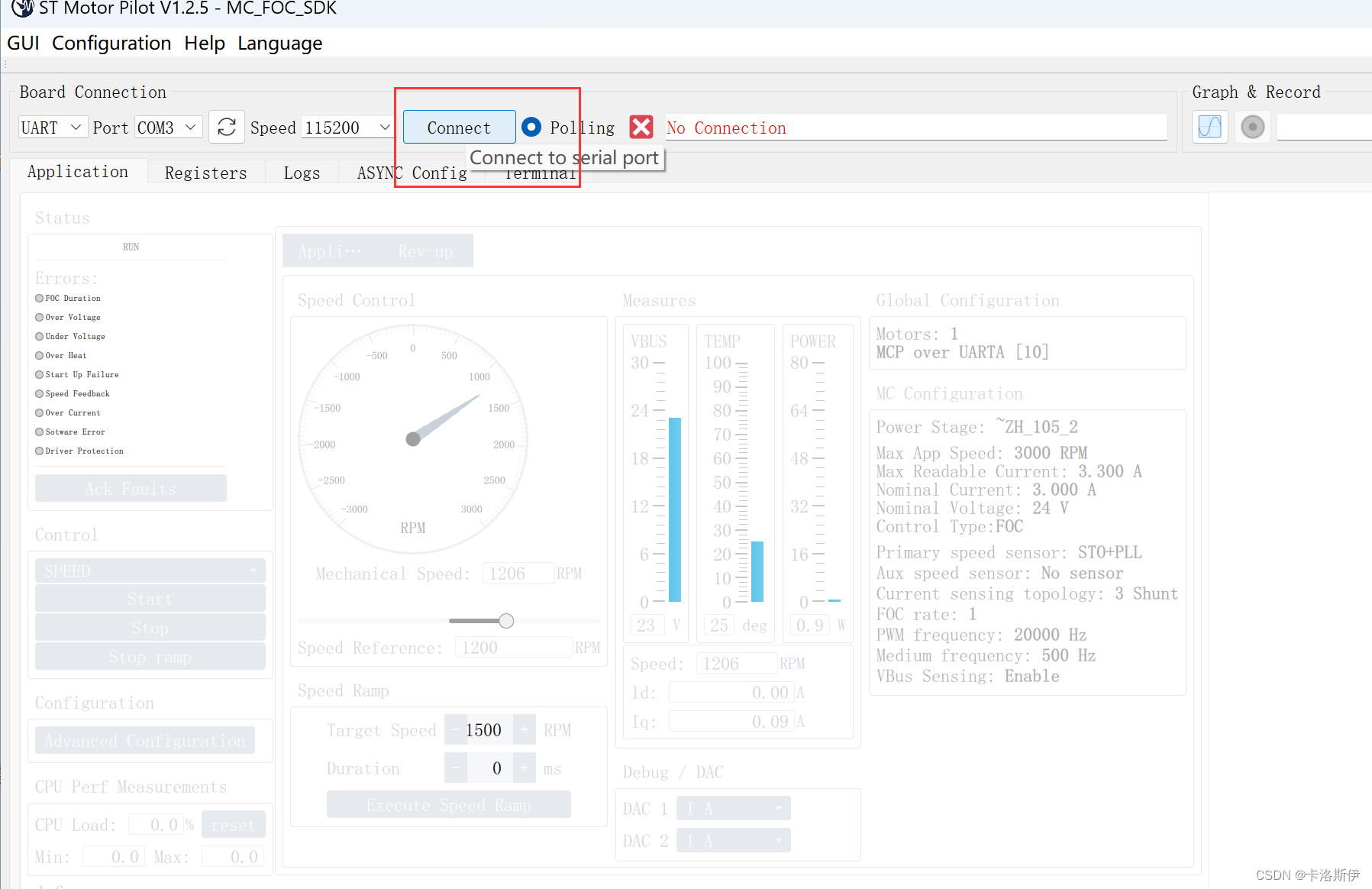
下载程序后,可以直接用开发板的启动按钮开机,打开Motor Pilot 6.2.1软件。
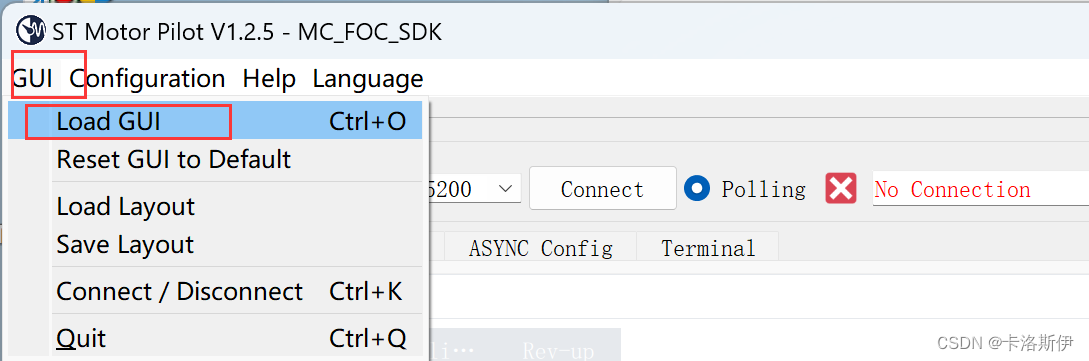
选择上位机界面
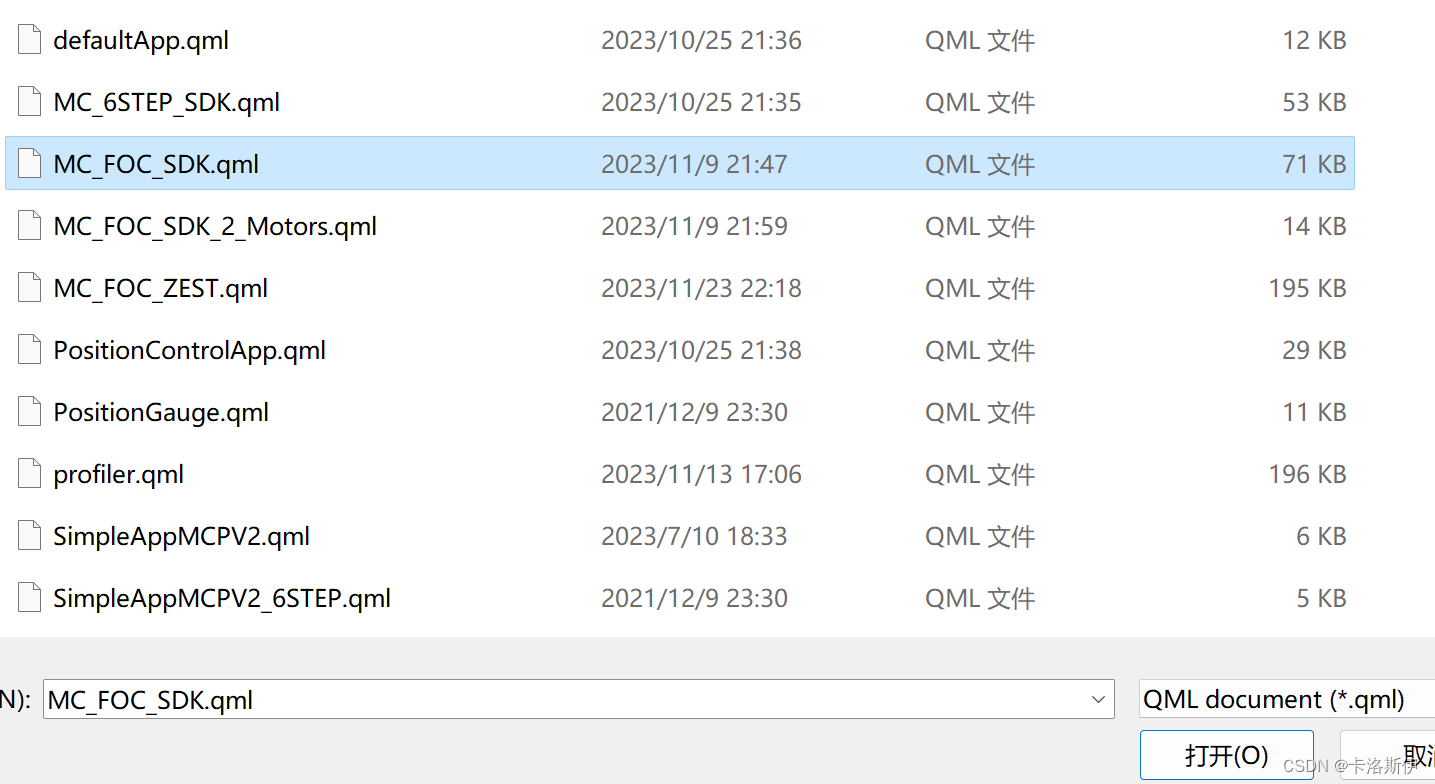
这个界面就和老板本很像了,点击连接。
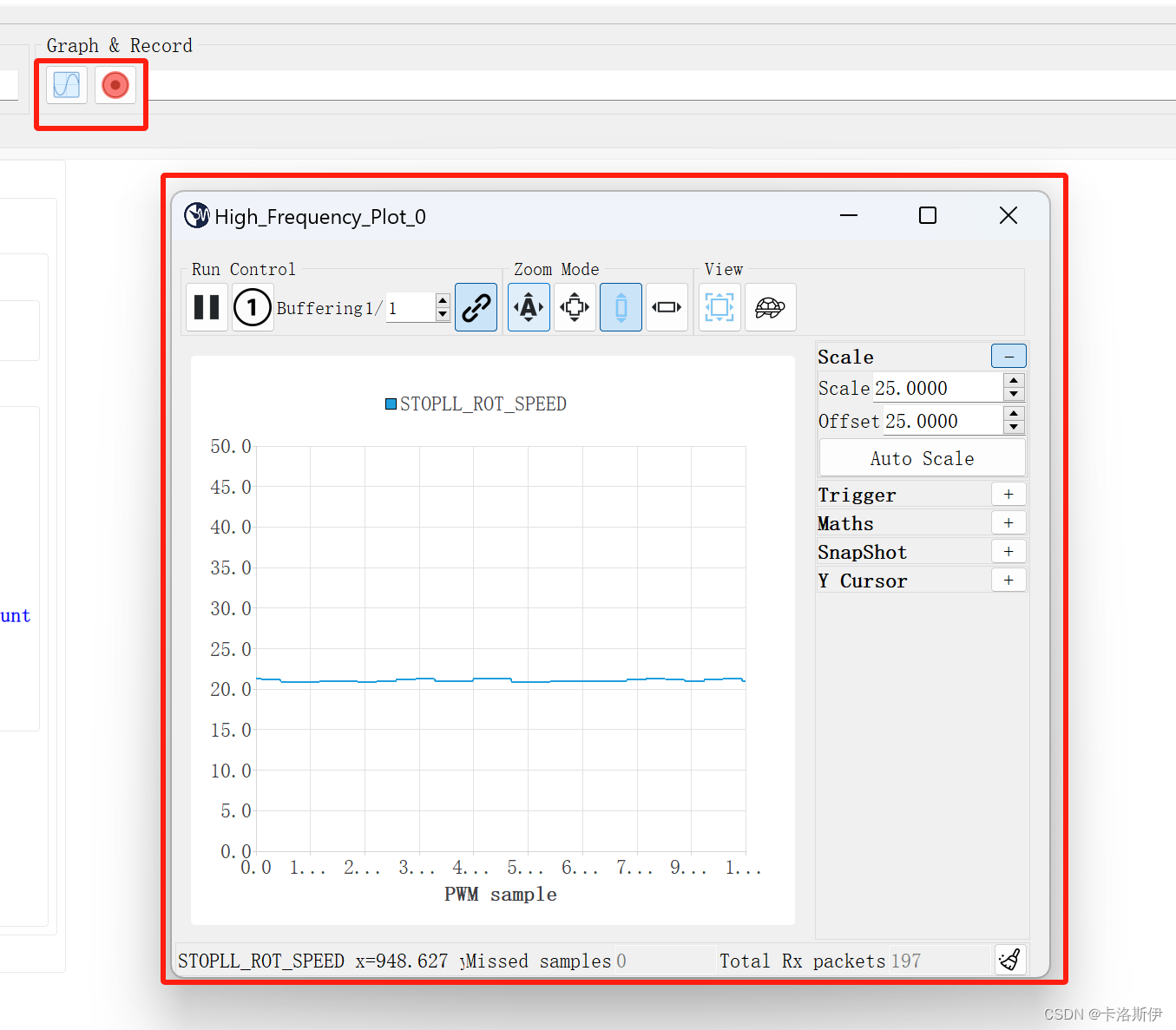
 还可以点波形,查看变量的变化。
还可以点波形,查看变量的变化。
 总结
总结
到这里,基于MotorControl Workbench 6.2.1 电机库的安装,下载运行,上位机调试的流程就结束了。很想吐槽下!!!



















 580
580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











