







前言
正文
一、YCbCr
1.1 什么是YCbCr
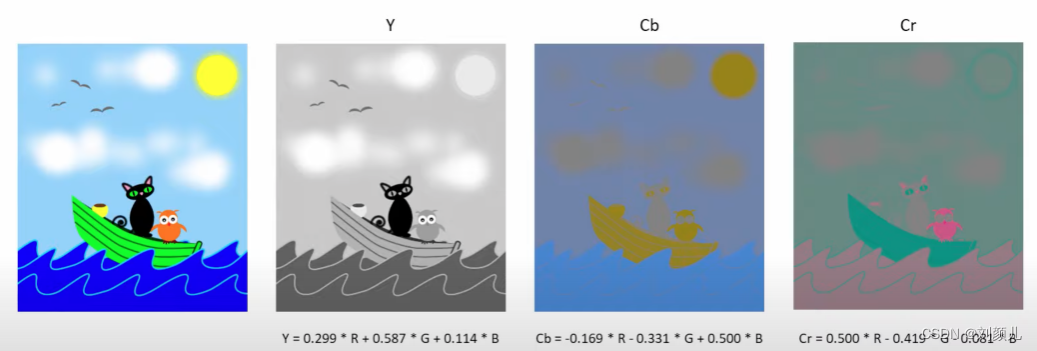
Y通道: 表示图像的强度、亮度
Cb通道: 表示图像蓝色 色度
Cr通道: 表示图像红色 色度
1.2 为什么要用YCbCr
减少色彩信息,进而来减少存储空间 参考资料
对比
用RGB表示一张图片,其中GRB三个通道分别如下:
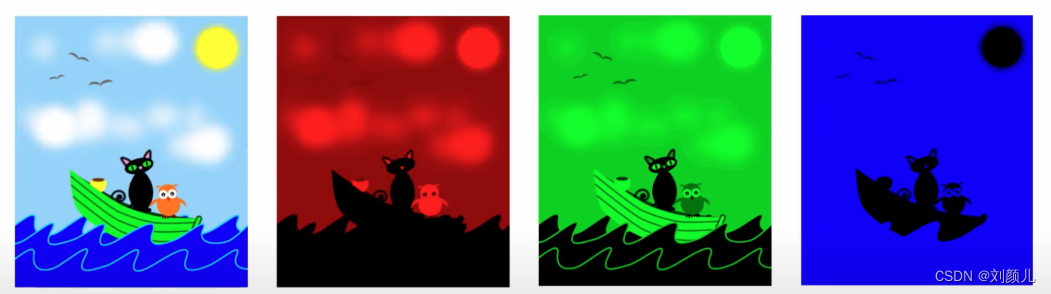
用YCbCr表示的图像如下:
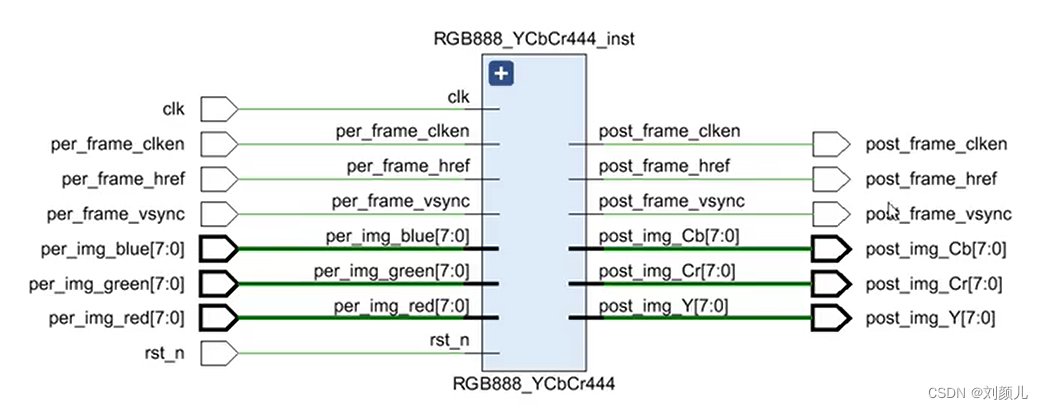
1.3 如何实现
- 计算公式
Y = ( 77 ∗ R + 150 ∗ G + 29 ∗ B ) > > 8 C b = ( − 43 ∗ R − 85 ∗ G + 128 ∗ B + 32768 ) > > 8 C r = ( 128 ∗ R − 107 ∗ G − 21 ∗ B + 32768 ) > > 8 Y = (77 *R + 150*G + 29 *B)>>8\\ Cb = (-43*R - 85 *G + 128*B + 32768)>>8\\ Cr = (128*R - 107*G - 21 *B + 32768)>>8 Y=(77∗R+150∗G+29∗B)>>8Cb=(−43∗R−85∗G+128∗B+32768)>>8Cr=(128∗R−107∗G−21∗B+32768)>>8 - 流水线:相乘——相加——右移8位(舍弃低8位)
- 行信号打拍
`timescale 1ns / 1ps
module RGB888_YCbCr444
(
//global clock
input clk, //cmos video pixel clock
input rst_n, //global reset
//Image data prepred to be processd
input per_frame_vsync, //Prepared Image data vsync valid signal
input per_frame_href, //Prepared Image data href vaild signal
input per_frame_clken, //Prepared Image data output/capture enable clock
input [7:0] per_img_red, //Prepared Image red data to be processed
input [7:0] per_img_green, //Prepared Image green data to be processed
input [7:0] per_img_blue, //Prepared Image blue data to be processed
//Image data has been processd
output post_frame_vsync, //Processed Image data vsync valid signal
output post_frame_href, //Processed Image data href vaild signal
output post_frame_clken, //Processed Image data output/capture enable clock
output [7:0] post_img_Y, //Processed Image brightness output
output [7:0] post_img_Cb, //Processed Image blue shading output
output [7:0] post_img_Cr //Processed Image red shading output
);
//==========================================parameter===========================================================
/*********************************************
//Refer to <OV7725 Camera Module Software Applicaton Note> page 5
Y = (77 *R + 150*G + 29 *B)>>8
Cb = (-43*R - 85 *G + 128*B)>>8 + 128
Cr = (128*R - 107*G - 21 *B)>>8 + 128
Y = (77 *R + 150*G + 29 *B)>>8
Cb = (-43*R - 85 *G + 128*B + 32768)>>8
Cr = (128*R - 107*G - 21 *B + 32768)>>8
**********************************************/
//==========================================reg=================================================================
reg [15:0] img_red_r0, img_red_r1, img_red_r2;
reg [15:0] img_green_r0, img_green_r1, img_green_r2;
reg [15:0] img_blue_r0, img_blue_r1, img_blue_r2;
reg [15:0] img_Y_r0;
reg [15:0] img_Cb_r0;
reg [15:0] img_Cr_r0;
reg [7:0] img_Y_r1;
reg [7:0] img_Cb_r1;
reg [7:0] img_Cr_r1;
reg [2:0] per_frame_vsync_r;
reg [2:0] per_frame_href_r;
reg [2:0] per_frame_clken_r;
//==========================================wire=================================================================
//==========================================assign=================================================================
assign post_frame_vsync = per_frame_vsync_r[2];
assign post_frame_href = per_frame_href_r [2];
assign post_frame_clken = per_frame_clken_r[2];
// 当有行信号时,就输出
assign post_img_Y = post_frame_href ? img_Y_r1 : 8'd0;
assign post_img_Cb = post_frame_href ? img_Cb_r1: 8'd0;
assign post_img_Cr = post_frame_href ? img_Cr_r1: 8'd0;
//==========================================always=================================================================
// 第一级流水线:执行乘法
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
begin
img_red_r0 <= 0;
img_red_r1 <= 0;
img_red_r2 <= 0;
img_green_r0 <= 0;
img_green_r1 <= 0;
img_green_r2 <= 0;
img_blue_r0 <= 0;
img_blue_r1 <= 0;
img_blue_r2 <= 0;
end
else
begin
img_red_r0 <= per_img_red * 8'd77;
img_red_r1 <= per_img_red * 8'd43;
img_red_r2 <= per_img_red * 8'd128;
img_green_r0 <= per_img_green * 8'd150;
img_green_r1 <= per_img_green * 8'd85;
img_green_r2 <= per_img_green * 8'd107;
img_blue_r0 <= per_img_blue * 8'd29;
img_blue_r1 <= per_img_blue * 8'd128;
img_blue_r2 <= per_img_blue * 8'd21;
end
end
// 第二级流水线:执行加法
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
begin
img_Y_r0 <= 0;
img_Cb_r0 <= 0;
img_Cr_r0 <= 0;
end
else
begin
img_Y_r0 <= img_red_r0 + img_green_r0 + img_blue_r0;
img_Cb_r0 <= img_blue_r1 - img_red_r1 - img_green_r1 + 16'd32768;
img_Cr_r0 <= img_red_r2 + img_green_r2 + img_blue_r2 + 16'd32768;
end
end
// 第三级流水线:右移8位=除以256 ??是的,往右移8位,把低8位挤走了
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
begin
img_Y_r1 <= 0;
img_Cb_r1 <= 0;
img_Cr_r1 <= 0;
end
else
begin
img_Y_r1 <= img_Y_r0 [15:8];
img_Cb_r1 <= img_Cb_r0[15:8];
img_Cr_r1 <= img_Cr_r0[15:8];
end
end
//------------------------------------------
//lag 3 clocks signal sync
// 上面有3级流水线,因此经历了3个时钟,于是需要把输入的行、使能信号等进行3次打拍操作
// 这里的打拍操作比较厉害,值得学习!!
//---------------------------------------------
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
begin
per_frame_vsync_r <= 0;
per_frame_href_r <= 0;
per_frame_clken_r <= 0;
end
else
begin
per_frame_vsync_r <= {per_frame_vsync_r[1:0], per_frame_vsync};
per_frame_href_r <= {per_frame_href_r [1:0], per_frame_href};
per_frame_clken_r <= {per_frame_clken_r[1:0], per_frame_clken};
end
end
//==========================================状态机=================================================================
//==========================================模块例化=================================================================
endmodule

















 2039
2039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









