







MaxPool2d
使用形式如下:
torch.nn.MaxPool2d(kernel_size,
stride=None, padding=0, dilation=1,
return_indices=False, ceil_mode=False)官方文档给出的参数解释如下:

参数释义:
kernel_size:池化核的尺寸大小。
stride:池化核的步长,默认值为池化核的尺寸。
padding:输入图像周围的隐式填充。可以是单个数字或元组(padH、padW)。默认值:0,此时表示不填充。该参数解释可查看下文:
CSDN![]() https://mp.csdn.net/mp_blog/creation/editor/132054470
https://mp.csdn.net/mp_blog/creation/editor/132054470
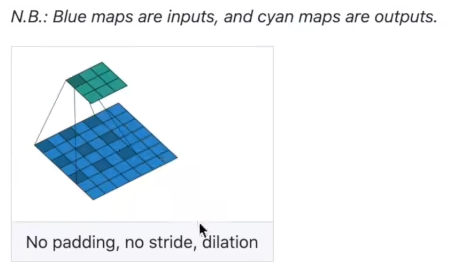
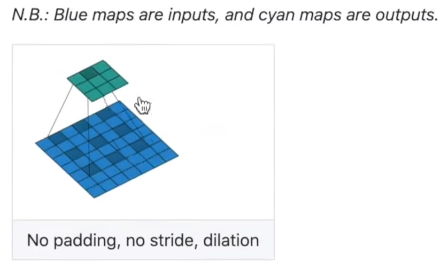
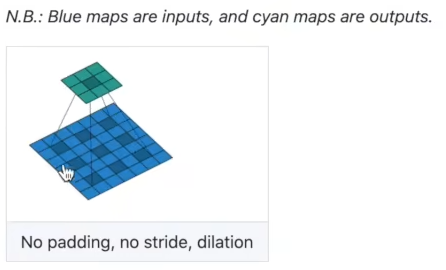
dilation:一个参数,用于控制窗口中元素的步幅。例子如下:
dilation = 1时,有:

return_indices:该参数不经常使用,不作过多了解。
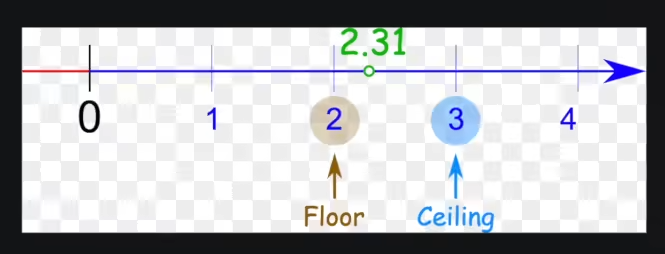
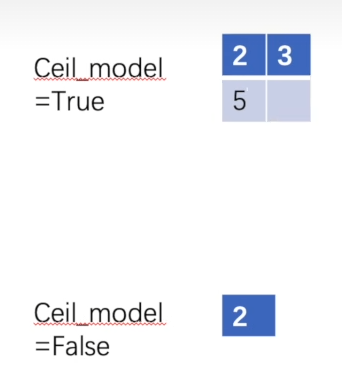
ceil_mode:若该参数取值为True,则在计算输出图像形状时会使用ceil模式而不是floor模式。ceil表示向上取整,即向正无穷靠拢,而floor是向下取整,即向负无穷靠拢。举例如下图所示:
该类模块输入输出为:
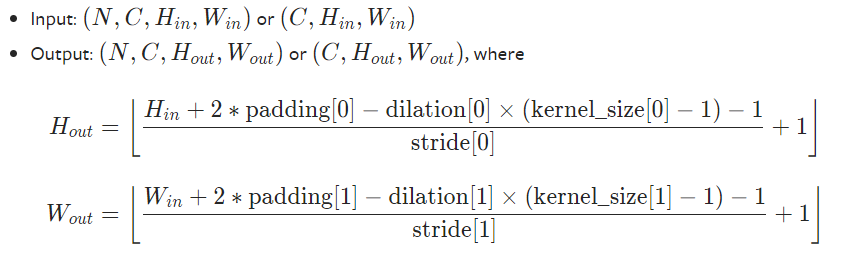
input的四个参数释义:
N:batch_size大小
C:通道数
Hin:输入图像高
Win:输入图像宽
output的四个参数释义:
N:batch_size大小
C:通道数
Hin:输出图像高
Win:输出图像宽
最大池化操作理论分析
给定如下输入图像及相应池化核,则输出结果为?

首先进行第一步匹配,如下图所示。
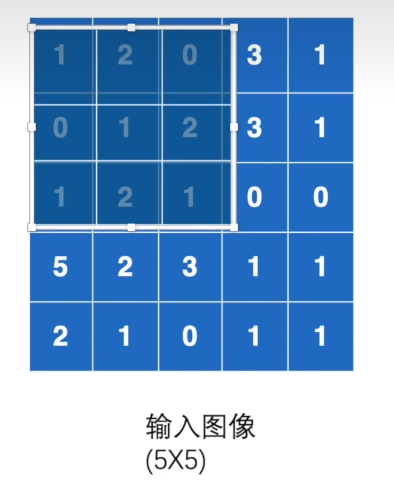
最大池化操作的过程是,在匹配后的框中寻找最大的数。经对比,可知最大数为2,则第一步结果为:

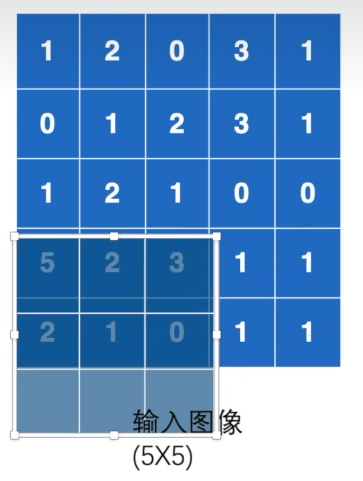
第二步匹配结果如下图所示。(假设stride取值为默认值,即池化核的尺寸大小,则池化核需要移动三个步长)

此时得到的结果需要取决于参数ceil_mode的取值,结果如下所示:(注:ceil_mode=True 即为保留;ceil_mode=False 即为舍弃)

下一步结果为:
在下一步结果为:


上右图也即为最终池化后的结果。
代码验证部分
ceil_mode = True时的代码如下所示。
import torch
# 输入图像信息
from torch import nn
from torch.nn import MaxPool2d
input = torch.tensor([[1, 2, 0, 3, 1],
[0, 1, 2, 3, 1],
[1, 2, 1, 0, 0],
[5, 2, 3, 1, 1],
[2, 1, 0, 1, 1]], dtype=torch.float)
input = torch.reshape(input, (-1, 1, 5, 5)) # -1表示自动计算batch_size的大小
# print(input.shape)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.maxpool1 = MaxPool2d(kernel_size=3, ceil_mode=True)
def forward(self, input):
output = self.maxpool1(input)
return output
tudui = Tudui() # 创建神经网络
output = tudui(input)
print(output)
ceil_mode = True 时运行结果为:
tensor([[[[2., 3.],
[5., 1.]]]])
ceil_mode = False 时运行结果为:
tensor([[[[2.]]]])上述结果与理论部分结果一致。














 1511
1511











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









