







CAN网络管理
1. NM状态机
1.1 几种常见的跳转流程
1.1.1 BSM->RMS->RSS->PBSM->BSM
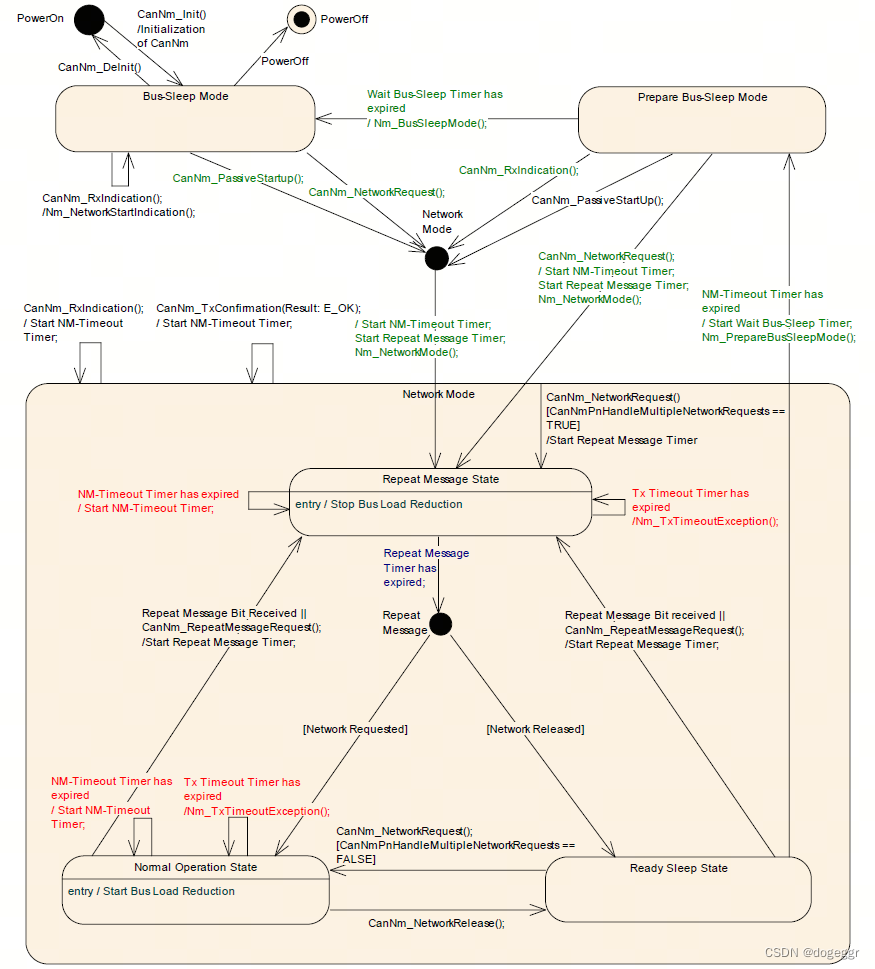
ECU上电后,节点处于Bus Sleep Mode且不应该被应用报文唤醒;
当接收到有效的NM报文或者有本地的唤醒事件,节点应在150ms内发出第一帧报文,且必须为NM报文,此时NM状态机处于网络模式中的Repeat Message State状态并保持一段时间(CanNmRepeatMessageTime=1s)。节点对网络通信没有需求,E节点在离开RMS状态后CAN网络管理模块应进入Ready Sleep State,同时停发网络管理报文。维持在此状态的唯一动力就是还能接收到外部的有效网络管理报文,一旦接收的NM报文停发,超过一定时间(CanNmTimeouTime=3s),CAN NM模块就会进入到PBSM,该模式的目的是保证所有节点在进入Bus Sleep Mode 前有时间停止其网络活动,确保总线上不会有任何活动。CAN NM 模块在该模式下停留的时间为CanNmWaitBusSleepTime=4s.
1.1.2 BSM->RMS->NOS->RSS->NOS->RSS->PBSM->BSM
这种跳转流程与上面的类似,只是中间多了个NOS的状态。那进入NOS的Network Requested 和 离开NOS的Network Released 如何理解呢?requested: 该ECU内的某个软件模块SWC需要总线通讯。Released: 同样的,该ECU内没有哪个SWC需要总线通讯了。需要注意的是network is released 不代表该控制器没有报文交互了,因为此时可能其他控制器在请求网络。也即在该控制器本身没有网络通讯需求时,会从NOS跳转到RSS,同时停发网络管理报文,但此时其他控制器有通讯需求,我们会接收到他的网络管理报文,进而维持在RSS状态。
关于诊断报文的处理,理论上在RMS和RSS有诊断报文的请求也应跳转到NOS状态。在BSM阶段不应被诊断报文唤醒,另外在PBSM阶段也不应响应诊断请求。但目前多数域控制器诊断功能都是走的DoIP协议,并没有是使用CAN诊断,DBC中没有相关的诊断报文,故诊断报文的处理机制也并不适用了。
2. Network Management PDU Structure
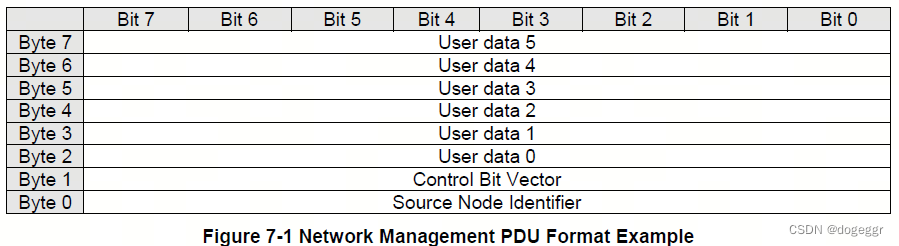
示例1:主动唤醒网络:49 10 01 00 00 00 00 86
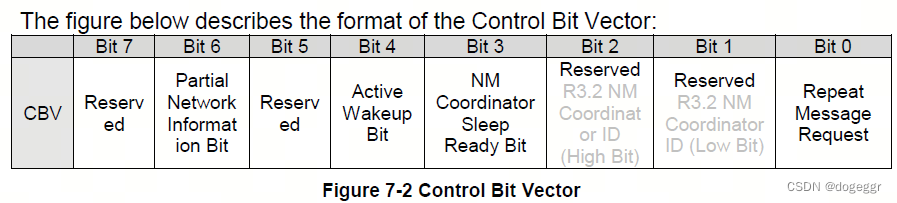
示例2:支持PNC功能的报文格式:78 40 02 00 01 00 00 BA
示例3:被动唤醒网络:5A 00 02 00 00 00 00 25
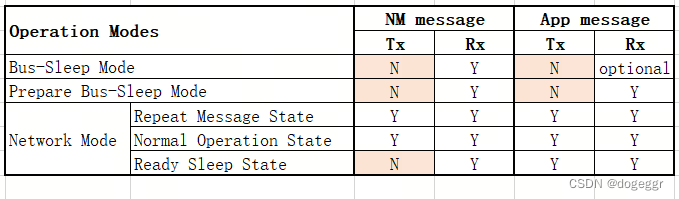
2.1 不同运行模式下NM报文&App报文收发行为
3. 常见问题
3.1 ECU启动后要在多长时间内发出报文?
网络或硬件唤醒后,ECU应在150ms内发出第一帧网络管理报文;随后在10ms内发出第一帧应用报文;并且在第一帧网络管理报文发出后150ms内所有的周期性报文至少要发送一次。时间参数允许10%误差。
3.2 CAN的网络管理涉及到休眠唤醒,和电源管理关系是怎样的?
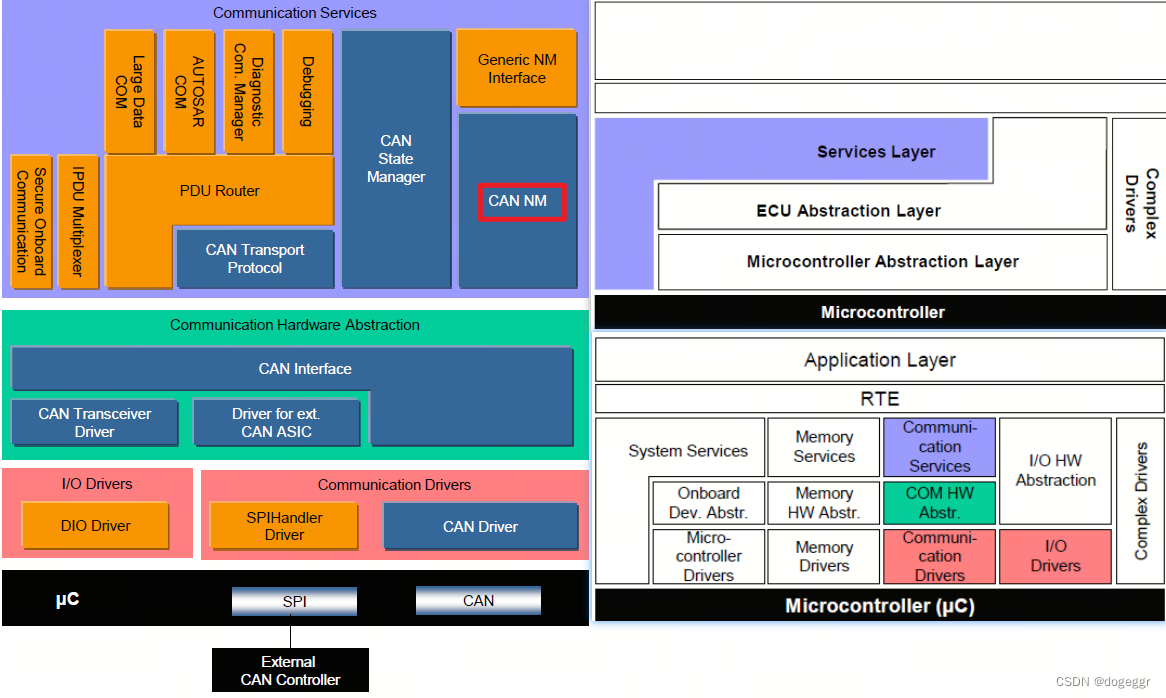
CAN NM模块处于AUTOSAR CP中的通讯服务层。实际上网络管理和电源管理是两套不同的逻辑,但彼此又有些关联。可以从NM的状态机中看,实际上power on ->BSM 和 BSM->power off 这块的逻辑才是电源管理的内容,涉及到上下电时序,上电自检,下电存储,包括一些硬件层面的芯片引脚操作等。此时又将引入另外一个CP AUTOSAR的另外一个模块EcuM。但在下电过程中,收到有效的唤醒源,也应立即响应并进入到RMS状态。
3.3 常见的唤醒源有哪些?
- 网络唤醒:节点接收到其他控制器发送的有效的网络管理报文。接收节点需校验Source Node Identifier是否符合主机厂规范定义的有效范围,另外如果集成了PNC功能,还需校验该ECU是否属于该PNC的成员,如果不是,可以认为是无效的唤醒源,也不应被唤醒。如果一个控制器仅支持网络唤醒,不支持本地唤醒,时间上是没有主动唤醒功能的。应用报文是无法唤醒控制器的。一定是控制器接收到了NM报文唤醒自己后,在根据应用报文的条件来判断是否满足了一些网络保持的条件,如果满足,可以进入NOS,发送网络管理报文,来维持网段的唤醒。
- 本地唤醒:如果说网络唤醒是通过报文唤醒的方式,那本地唤醒可以理解为是硬线唤醒的方式。如KL15线,油门踏板传感器,RTC触发等控制器本身本身的一些外围器件触发的唤醒。
3.4 常见的一些参数配置有哪些,含义是什么?
CanNmImmediateNmTransmission 节点进入重复报文状态后网络管理快发报文的数量

CanNmImmediateNmCycleTime 两个连续网络管理快发报文的时间间隔

CanNmRepeatMessageTime 节点处在重复报文状态的时间

CanNmMsgCycleTime 两个连续网络管理正常报文的时间间隔

CanNmWaitBusSleepTime 在进入BSM总线休眠模式前,节点在PBSM准备总线休眠模式停留的时间

CanNmTimeoutTime 在进入PBSM准备总线休眠模式前,节点应该在休眠就绪状态RSS停留的时间

CanNmMsgCycleOffset 周期传输模式下第一帧网络管理报文的发送延时
4. 参考文档
- AUTOSAR_SWS_CANNetworkManagement_V4.4.0.pdf
- Specification of CAN Network Management AUTOSAR CP Release 4.4.0
















 750
750











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









