






一、独立转向设置
通过simulink中搭建转向系,直接向carsim中输入转角信号实现独立转向
1、首页输入指令opt_steer_ext(1) 4
OPT_STEER_EXT=1表示车桥不是转向桥,但保留了由悬架运动学和弹性力学特性产生的转向效果。即指定1时,将绕过转向运动学的解算器代码。大多数与转向相关的参数和表格未显示在中echo文件。除第一个轴外,所有车轴的默认值均为1。
OPT_STEER_EXT=2将保留转向柱和横拉杆/转向臂运动学,用外部元件代替齿条和小齿轮或转向机及其动力学、助力和控制。
OPT_STEER_EXT=3将替换除横拉杆和转向臂运动学之外的所有内容。
当转向系统被完全更换(OPT_STEER_EXT=4)时,CarSim没有任何转向部件的特性、动力学、运动学连接、增压系统、摩擦、阻尼等信息。
四轮独立转向可在carsim中使用指令opt_steer_ext(1) 4,转向系在simulink中搭建,直接输入四轮转角。
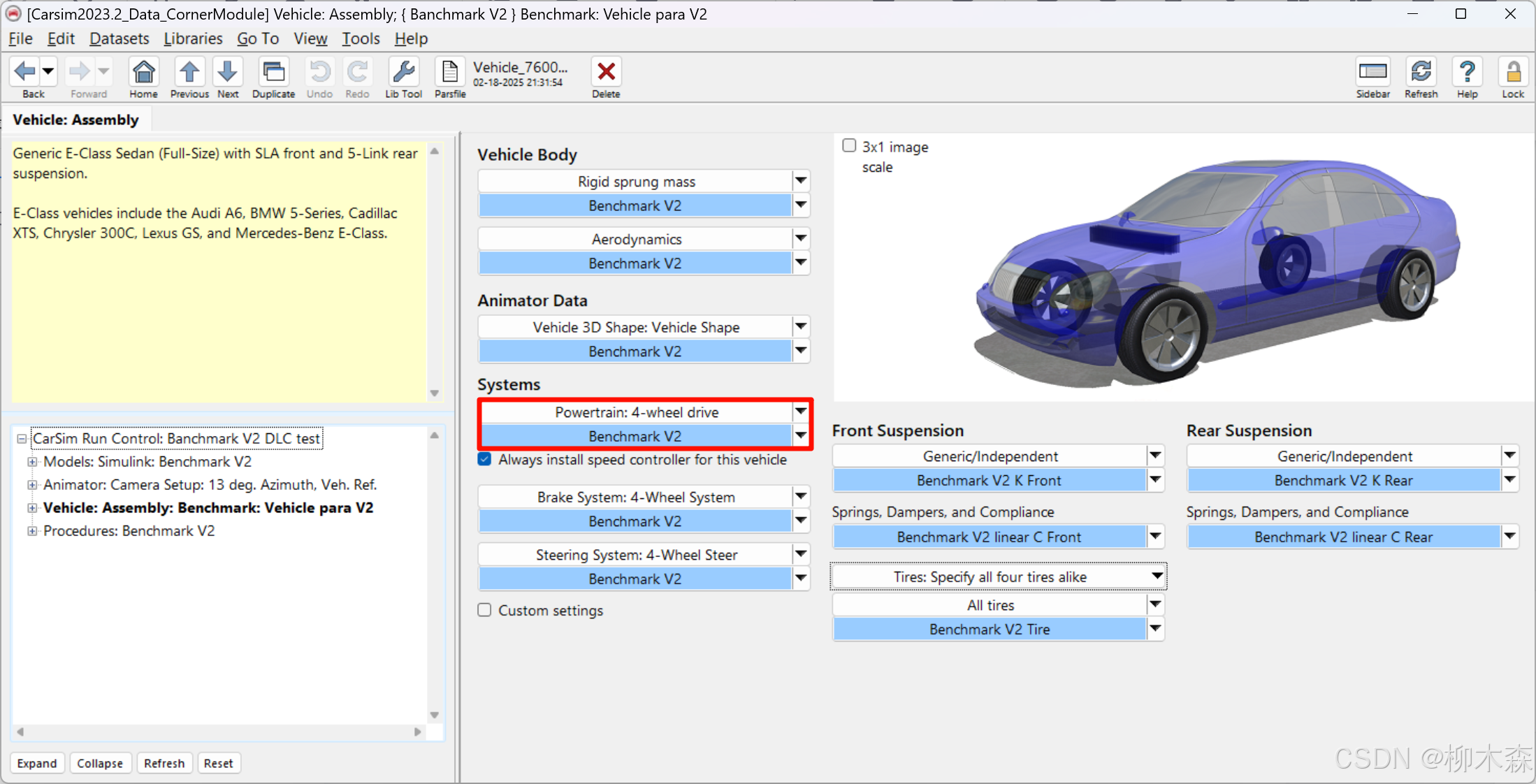
Carsim中转向系部分前后轴转向系均需要选择,图中红框任选一个,否则无法激活转向效果,导致carsim仿真动画中无车轮转向效果。
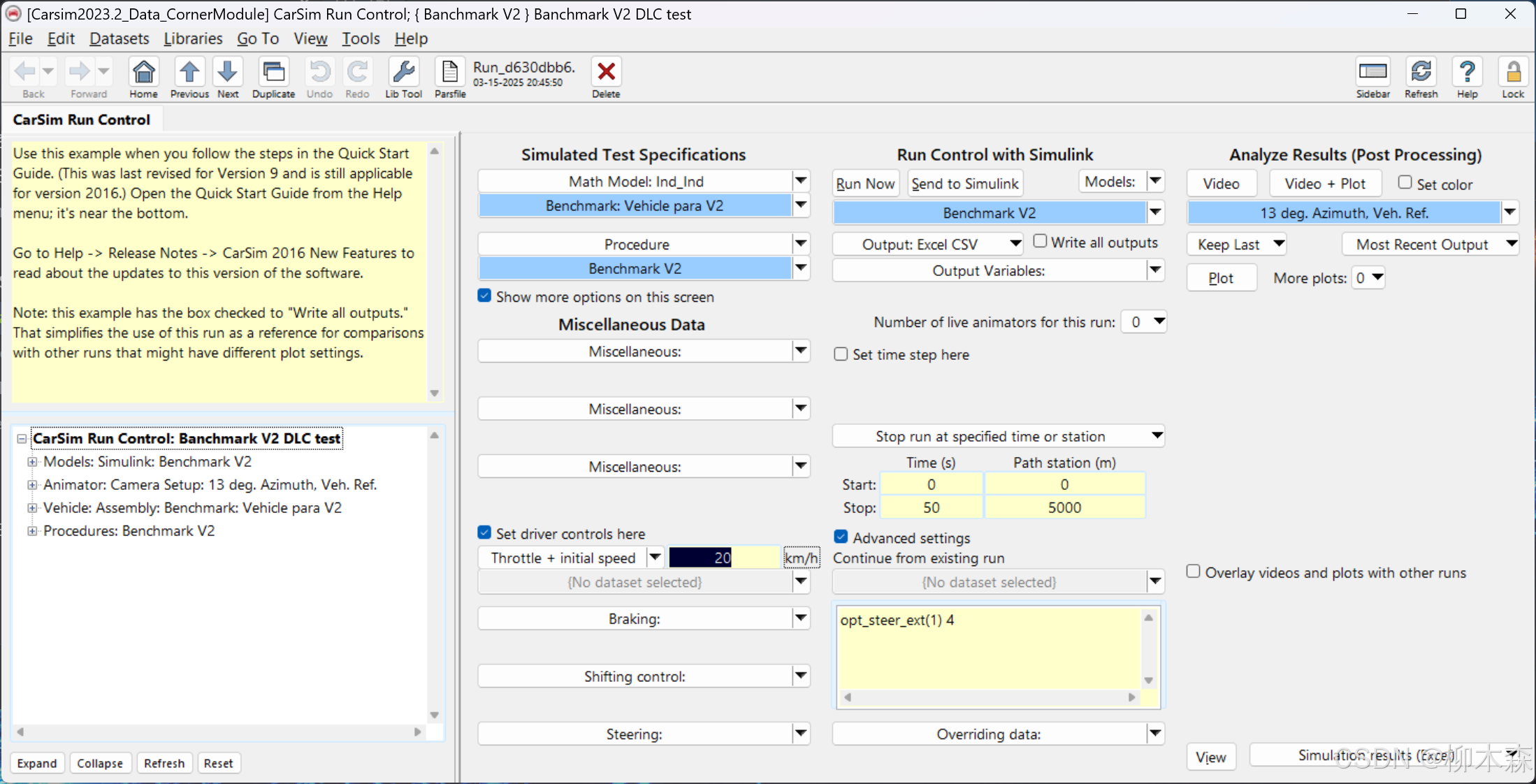

2、联仿信号设置:红框处为四轮转角输入
二、独立驱动设置
1、动力传动按图示选择四轮驱动
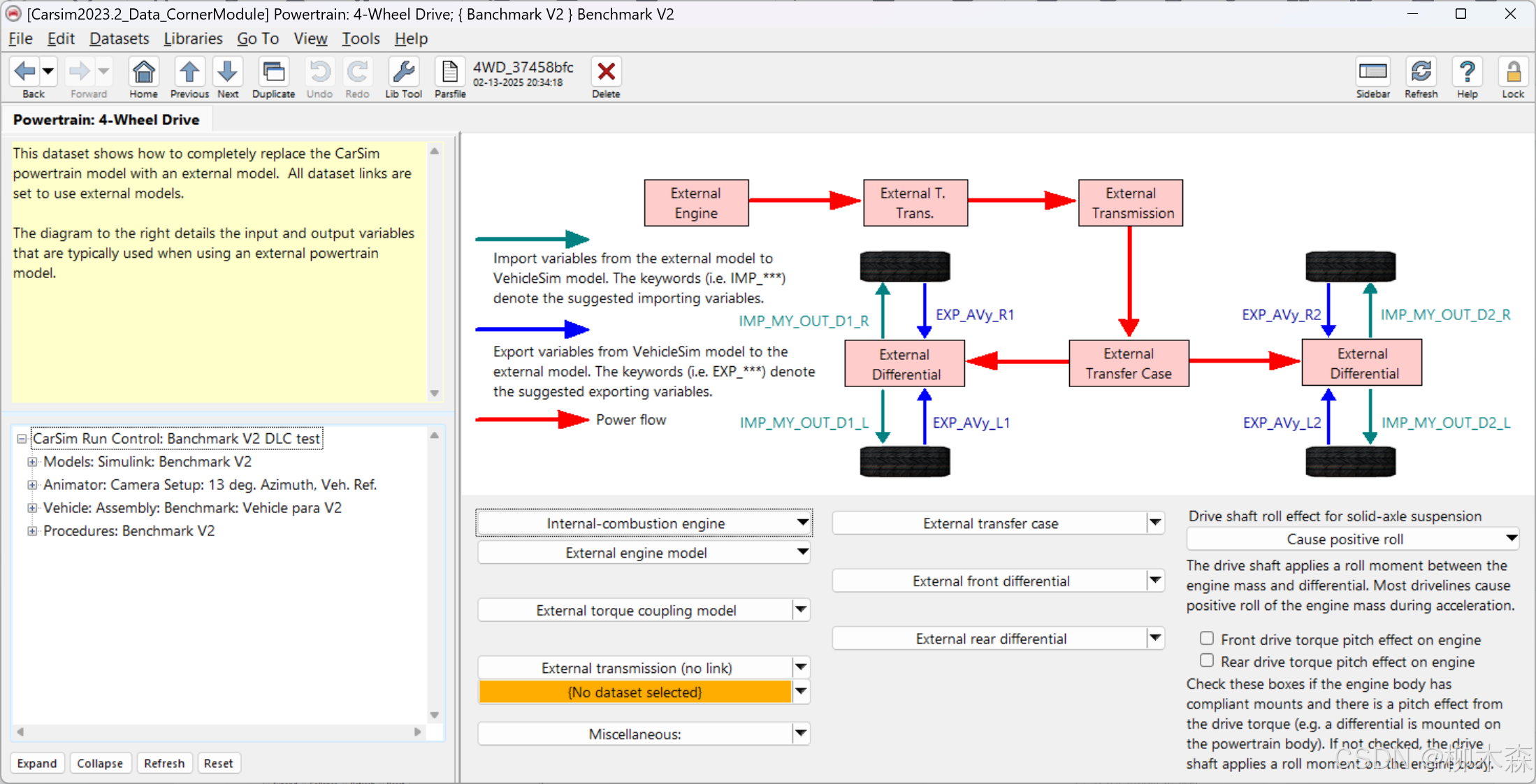
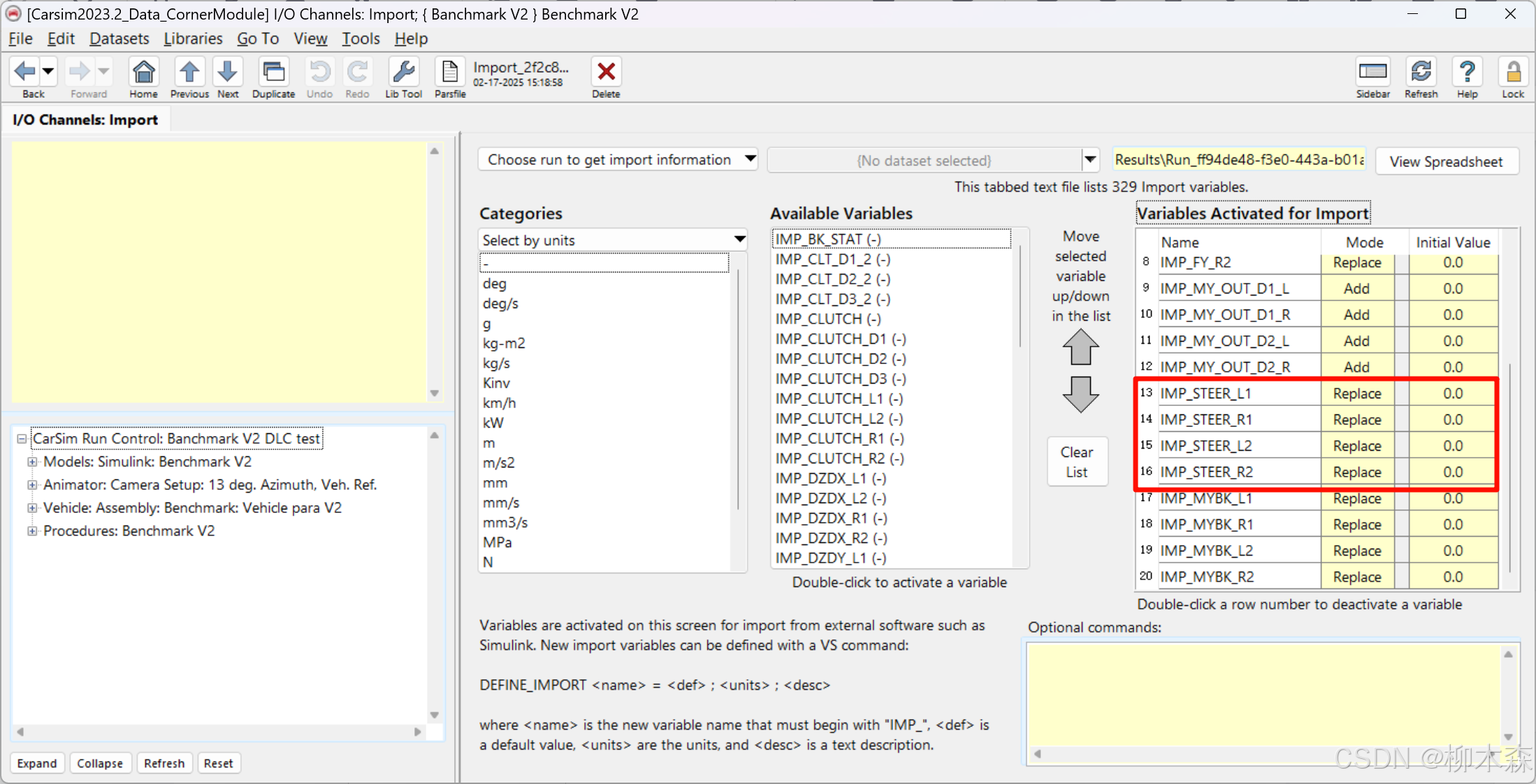
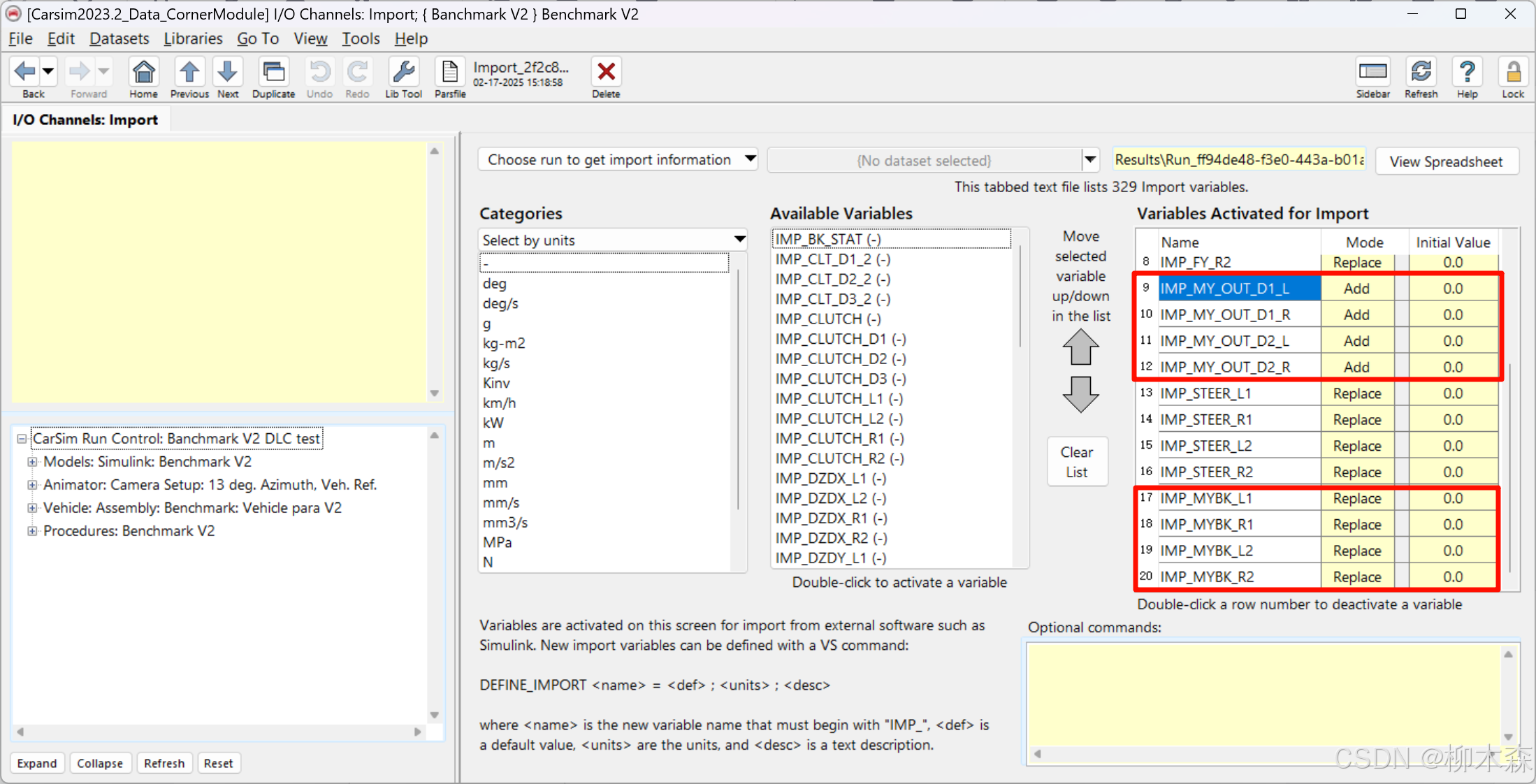
2、联仿输入信号设置:simulink输入到carsim的变量为转矩,9到12为驱动转矩,17到20为制动转矩

















 1601
1601

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









