






大家遇到问题要先思考,先看软件给出的反馈提示!
(我不接代做哦)
Carsim的配置:
1.观看SBW视频:首先,请确保观看SBW(可能是指某个特定设置或操作的视频教程)的最后一个视频,该视频将指导您如何正确配置Carsim的输入输出。
2.设置OPT_DRIVER_ACTION=0:在您的代码或配置文件中,将OPT_DRIVER_ACTION设置为0,这通常意味着将驾驶员行为设置为由外部(如Simulink)控制。
3.输入输出配置:如果已有.cpar文件,尝试直接读取以节省配置时间。但请注意Carsim版本兼容性(我使用的是Carsim2020.0),高版本可能无法直接读取低版本文件(不像Matlab等常见软件),此时需手动配置。
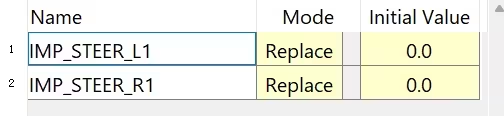
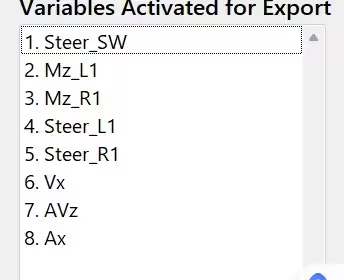
如果不需要前轮转角控制策略的话输出只要前六个即可
4.路径设置:如果您使用的是Matlab 2023a或以下版本,请找到low_version文件夹,并确保路径中不包含中文字符(不要将文件放在桌面上)
5.在Carsim中正确设置Simulink所在的路径后,通过Carsim的“Send to Simulink”功能打开Simulink模型,而不是直接双击Simulink打开(这样打开会出现问号图标)。
6.放置数据文件:将step.mat和doubleline.mat文件放置在由“Send to Simulink”打开的Matlab工作目录下,并双击以将它们加载到工作空间中。
模糊文件的配置:
当前应该是自动导入的(现在用的是引号路径),不行的话按以下步骤导入。
1.将两个模糊文件(.fis结尾)导入Carsim所在的Matlab工作目录
2.在Matlab命令窗口中输入fuzzyLogicDesigner(低版本用fuzzy)来打开模糊逻辑设计器。
3: 在模糊逻辑设计器中,寻找“导入”或“打开”文件的功能。选择“从文件”(From File)选项,然后浏览到.fis文件所在的位置,选择并导入这两个文件。
4: 导出到Matlab工作空间,在模糊逻辑设计器或工具箱中,找到将模糊系统导出到Matlab工作空间的功能。这通常在“文件”菜单下的“导出到工作空间”(Export to Workspace)。
5. 修改Matlab代码中的路径,回到您的Matlab脚本或函数中,找到原先使用引号路径指定模糊文件位置的代码,将引号删掉。(例:’ SBW_fuzzy_f ’ 改成SBW_fuzzy_f)
难评问题解答:
1.软件安装:建议通过微信公众号(如软件管家类)或CSDN等网站查找并跟随详细的安装步骤进行安装。若安装遇到问题,建议自行搜索解决后再继续后续操作。
2.软件使用:鼓励导向式学习,即在实际操作中遇到问题后再去搜索解决方案。但实际上Carsim和Simulink的使用教程在网络上较为丰富,可先把基本操作一次性学完再操作。
(不要在问基础配置的问题了哦,更别说啥远程帮你配置之类的)
常见问题解答:
1.方向盘总成与路感电机控制模型:方向盘总成通常用于路感模拟,而转角控制则通过转向电机实现。在本配置中,我们主要关注转角控制,因此方向盘总成并非必需。
2.转向电机电压Ufa的计算:
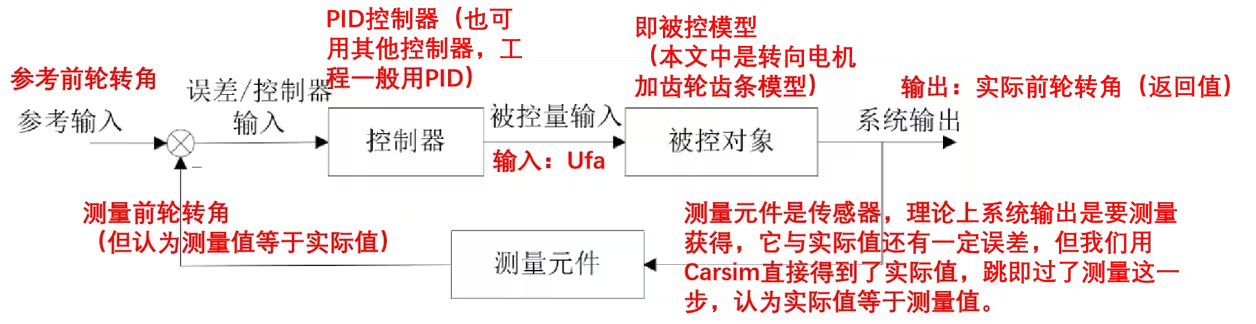
解释:转向电机电压Ufa的计算涉及经典反馈控制原理。该电压是通过比较可变传动比控制下的前轮期望转角与实际前轮转角,并将此误差输入PID控制器得到的。PID控制器根据误差大小调整输出,以驱动转向电机达到期望的转角。
基础建议:对于不熟悉经典反馈控制的同学,建议加强相关基础知识的学习,这将有助于理解更高级的控制理论和方法。
3.侧偏刚度的问题?
答:文中的侧偏刚度偏小,而且他认为前轮的侧偏刚度等于前轴的,这并不对,可以看一下我这两个视频。但最终我使用了文中给定的侧偏刚度进行计算。这是因为速度20-90km/h时,用的是稳态线性二自由度的值(用到了侧偏刚度),90-120km/h用的是模糊控制。如果想要自行调整侧偏刚度的话,边界值得重新敲定(非常简单,就调整一下模糊控制的边界值就可以)
Carsim中的基本参数设置及计算(簧载质量、非簧载质量、车轴转动惯量、轮胎侧偏刚度)_哔哩哔哩_bilibili
车辆垂直载荷与轮胎侧偏刚度计算值的准确性验证_哔哩哔哩_bilibili
4:关于PID参数的问题:
答:PID参数的设定具有很强的工况依赖性,每种工况通常只能对应一组最优参数。使用不匹配的参数可能会导致系统振荡、超调等问题。我目前使用的参数(5, 3, 10)在多种工况下表现良好,但为了达到更高的控制精度,仍需要根据具体工况进行微调。此外,您可以考虑使用自适应PID(如模糊PID、神经网络PID)或更高级的控制方法(如滑模控制、MPC等)来优化系统性能。
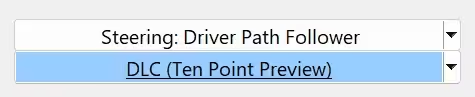
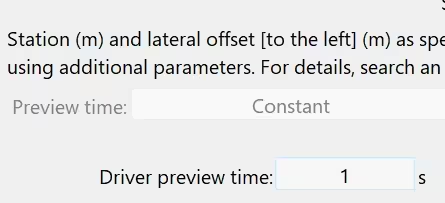
5.关于双移线工况横摆角速度超过20,而其他的论文基本都是10左右的问题:
答:在导入双移线工况时,如果选择了DLC(Quick start)并发现横摆角速度异常高,很可能是因为Driver Preview Time设置过短(默认为0.5s)。为了解决这个问题,可以选择使用DLC(Ten Point Preview)或将Quick Start的Preview Time修改为1s后重新导入。
6.读取不了step.mat文件,一直报错?
答:按我的方法保存方向盘角度后,在导入使用From workspace时,需要添加特定的后缀(.simout)。此外,也可能是由于数据类型不匹配导致的。建议您首先尝试在Matlab的帮助文档中搜索相关错误信息,或者查阅在线资源以了解如何在您的Matlab版本中正确读取.mat文件。
7.关于软件报错的处理:
重要的是先仔细阅读错误提示信息。错误提示通常会给出导致问题的具体原因或位置,这是解决问题的第一步。不要急于寻求外部帮助,而是先尝试根据提示信息自行解决问题。

答:很明显,没有模糊工具箱,下载一个就是了,但是你用的是盗版软件,不能通过交互命令行直接安装的话(用过Python的应该知道),那你就卸载以后重新安装整个Matlab。
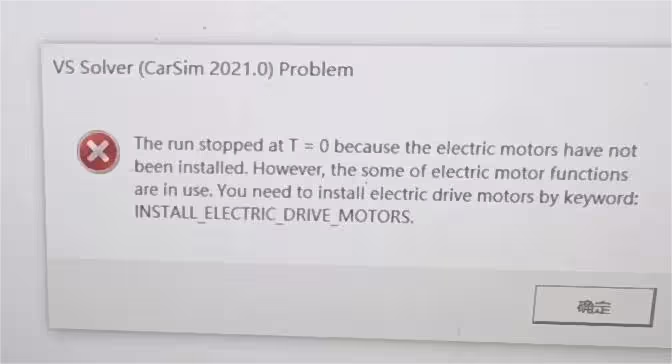
答:这是由于Carsim报的错,提示也很明显:说电机没有安装(跟本模型无关),一样的,找不到交互命令行就卸载以后将Carsim软件整体重下。
8.关于横摆角速度增益的问题:
答:Carsim软件本身不直接提供横摆角速度增益的输出功能,但我们可以通过计算横摆角速度与方向盘转角之间的比值来间接获得这一参数(同时需确保单位的一致性)。特别需要注意的是,在车辆速度介于20至90km/h的范围内,我们采用了线性二自由度模型的稳态值来估算横摆角速度增益,这一区间内的增益值被视为定值,为0.32(自己设置的)。然而,当速度进入90至120km/h的区间时,由于采用了模糊控制策略,横摆角速度增益将不再是定值,而是会根据具体情况动态调整。
若在20-90km/h的速度范围内,计算出的横摆角速度增益在0.32附近波动,偏差大约在0.01左右,这可能是由于多种因素导致的。一方面,转角响应可能存在滞后或误差。另一方面,计算中采用了左右前轮转角的平均值来近似代表前轮转角,这种简化处理可能也会引入一定的误差。建议直接物理处理图像。
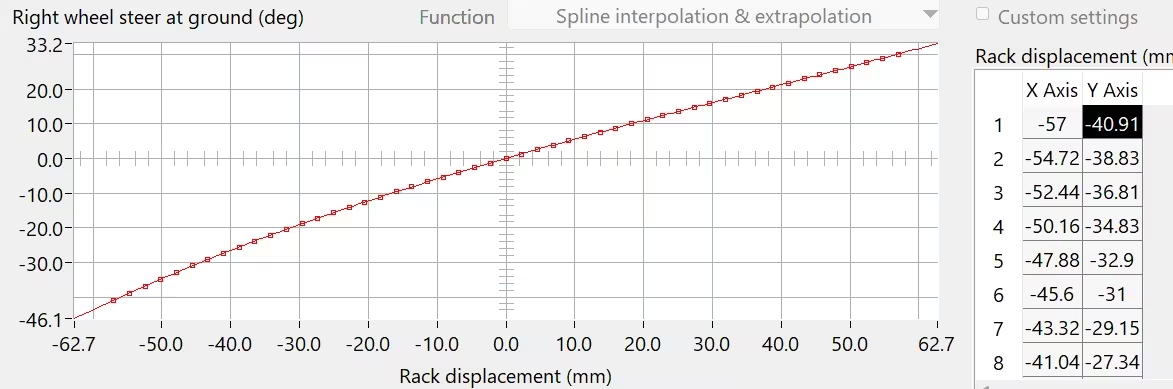
9.齿条位移是怎么转变为左右前轮的转角大小的?
在Carsim中点击Steering system下的B-Class, Hbk: Power
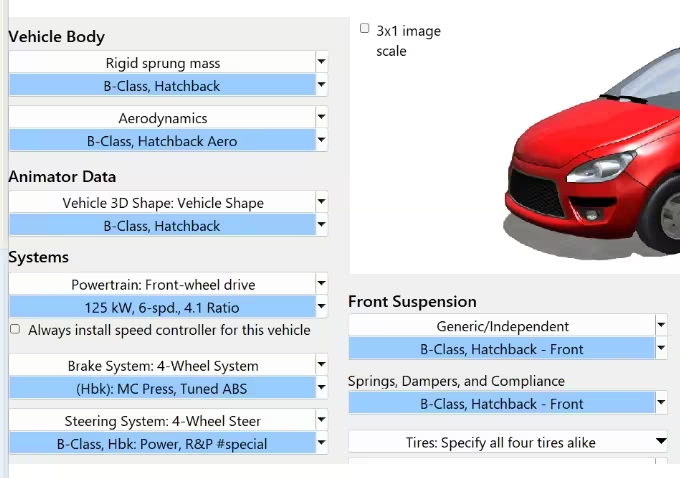
再点击Rack to front wheels:Steer Kinematics下的 B-Class, Hatchback
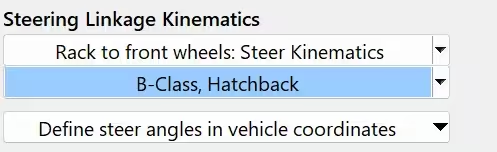
(B class用的是齿轮齿条式,还有其他例如循环球式的转向机构,可以看看C、D、E-Class的转向机构)
10.附加前轮转角是怎么计算的?
使用了二自由度的稳态模型作为理想模型。
由理想横摆角速度(质心侧偏角)和实际横摆角速度(质心侧偏角)经过PID(其他控制方法也行)得到的,和前面那个PID是一样的(详细见论文)。
11.综合反馈中是否少乘了180/pi? 为什么输入是弧度,经过PID后输出是度?
没少,因为PID的输入和输出并没有直接的单位关系。
1弧度等于57.3度。如果输入和输出都是以弧度为单位,那么计算出的附加前轮转角可能会比基本的前轮转角还要大,这在逻辑上是不合理的。作者在设计时可能就是这样考虑的,即输入使用弧度,而输出则转换为度。
12.综合反馈中模糊PID下面的PID是干什么用的,为什么用Switch分开?
只是做个对比分析。通过将模糊PID与普通PID进行比较,可以更直观地展示模糊控制方法的优势和效果,不需要的话可以删掉普通PID。
在面对问题时,请大家首先细致阅读软件给出的反馈提示,这是解决问题的第一步。随后,根据提示信息,逐步排查可能出现问题的环节,通过逐一调整和优化,逐步缩小问题范围,直至找到问题的根源。这一过程中,培养并展现自己独立解决问题的能力至关重要。记住,每一次成功解决问题的经历,都是对自己能力的一次提升和锻炼。
还有问题的话,可以先发在评论区,后期我再补充。















 1061
1061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









