







1 前言
大四上学期有一门硬件课程设计,在此处将这次实践简单的记录一下。本人选择的是第二个题目:抓物机械臂( 6 轴)控制器设计
2 课题目标简介
其实这个题目一步一步完成之后,会发现没有想象中的难,关键还是考验自己的编码能力,以及对前置课程《嵌入式系统》的掌握程度,这里其实只需要详细记得GPIO端口的相关使用,其实就可以基本解决问题了。
可以将整个任务简单的划分为以下的部分:
- 构建IP核(直接使用模板构建)
- 构建软件部分(使用c或者c++语言编写代码)
- 测试运行(验证自己的软件是否正确)
3 具体实现
3.1 构建IP核
- 使用Vavido构建IP核
这部分直接参考老师给的资料构建即可,但是我们实验的时候,很多人都在这里卡了很久,包括我自己,甚至花费了更多的时间,不然实验效果可以更好。所以,如果这一步实在有问题,建议直接找老师要这部分的东西,先写软件部分,或许写着写着,你就会发现之前构建IP核的问题的,不要浪费时间。
- 生成比特流
- 生成顶层模块
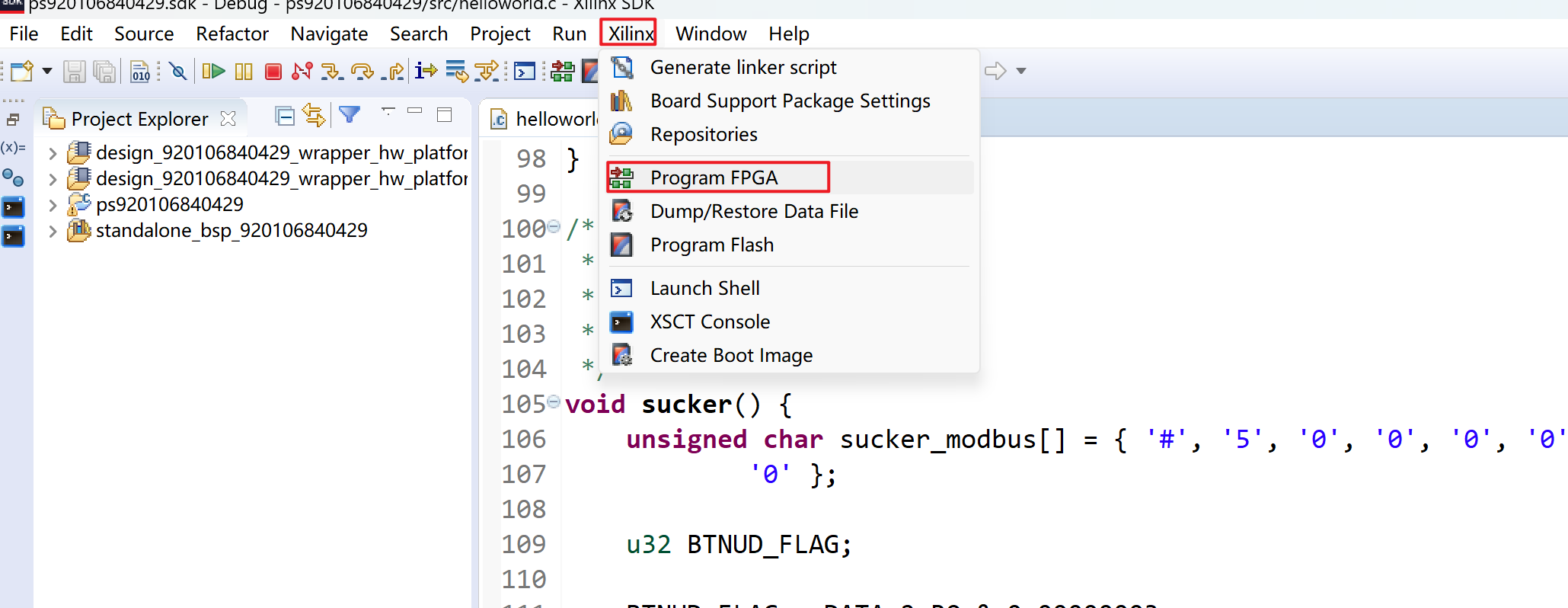
- 导出到SDK中,并打开SDK
以上步骤跟着老师嵌入式系统实验中的指导一步一步完成即可(注意部分参数需要根据本实验的PPT做调整),当然,这里需要提醒一点就是,如果打算在个人笔记本上做实验,最好将自己的IDE与实验室的统一一下,实验室的Vivado版本是2019.1,最好使用这个版本。因为从2019.2版本开始,编写软件部分就不是SDK了,或者说,SDK被从Vavido分离了。为了不必要的麻烦,建议直接使用vivado2019.1,这里提供一个安装包(包含license)
链接:https://pan.baidu.com/s/1uURsXxaODH6LMG9sNLAfDw?pwd=2e02
提取码:2e02
3.2 构建基本的软件开发环境
这一步也是根据老师的指导书完成,其中需要注意几点
- 这里Use Existing
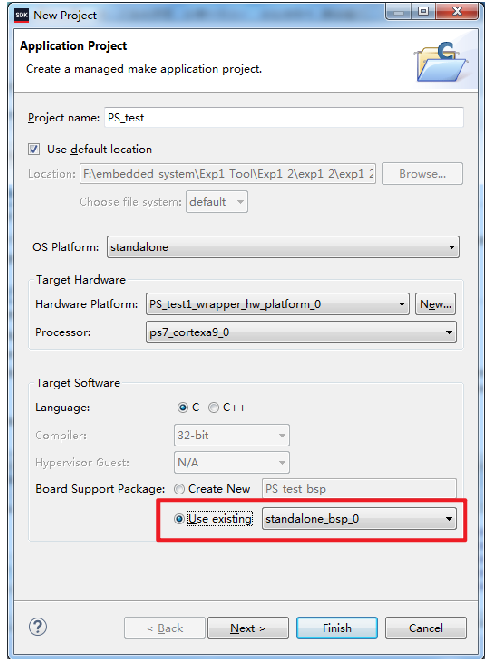
- 在运行羡慕的时候,一定要先做下面这一步,这一步完成之后,会发现开发板上的蓝色小灯亮了。
3.3 软件实现
以上步骤完成之后,就可以开始正常的编写控制机械臂的程序了。
//#include <stdio.h>
//#include "platform.h"
#include "xil_printf.h"
struct AXIE {
int cur_position; //轴的当前位置
int target_position; //轴的目标位置
int direction; //轴的转动方向,-1逆时针转,1顺时针转
};
//设置 MIO引脚地址
#define MIO_PIN_07 (*(volatile unsigned int *)0xF800071C)
#define MIO_PIN_50 (*(volatile unsigned int *)0xF80007C8)
#define MIO_PIN_51 (*(volatile unsigned int *)0xF80007CC)
//设置 GPIO端口方向寄存器地址
#define DIRM_0 (*(volatile unsigned int *)0xE000A204)
#define DIRM_1 (*(volatile unsigned int *)0xE000A244)
#define DIRM_2 (*(volatile unsigned int *)0xE000A284)
#define DIRM_3 (*(volatile unsigned int *)0xE000A2C4)
//设置 GPIO端口输出使能寄存器地址
#define OEN_0 (*(volatile unsigned int *)0xE000A208)
#define OEN_1 (*(volatile unsigned int *)0xE000A248)
#define OEN_2 (*(volatile unsigned int *)0xE000A288)
#define OEN_3 (*(volatile unsigned int *)0xE000A2C8)
//设置 GPIO端口输出寄存器地址
#define DATA_0 (*(volatile unsigned int *)0xE000A040)
#define DATA_1 (*(volatile unsigned int *)0xE000A044)
#define DATA_2 (*(volatile unsigned int *)0xE000A048)
#define DATA_3 (*(volatile unsigned int *)0xE000A04C)
//设置 GPIO端口输入寄存器地址
#define DATA_0_RO (*(volatile unsigned int *)0xE000A060)
#define DATA_1_RO (*(volatile unsigned int *)0xE000A064)
#define DATA_2_RO (*(volatile unsigned int *)0xE000A068)
#define DATA_3_RO (*(volatile unsigned int *)0xE000A06C)
//设置 UART1引脚地址的宏定义
#define rMIO_PIN_48 (*(volatile unsigned long*)0xF80007C0)
#define rMIO_PIN_49 (*(volatile unsigned long*)0xF80007C4)
#define rUART_CLK_CTRL (*(volatile unsigned long*)0xF8000154)
#define rControl_reg0 (*(volatile unsigned long*)0xE0001000)
#define rMode_reg0 (*(volatile unsigned long*)0xE0001004)
//设置 UART1端口波特率等参数地址寄存器的宏定义
#define rBaud_rate_gen_reg0 (*(volatile unsigned long*)0xE0001018)
#define rBaud_rate_divider_reg0 (*(volatile unsigned long*)0xE0001034)
#define rTx_Rx_FIFO0 (*(volatile unsigned long*)0xE0001030)
#define rChannel_sts_reg0 (*(volatile unsigned long*)0xE000102C)
void send_Char_9(unsigned char modbus[]); //9字节串口发送函数
void send_Char(unsigned char data); //串口发送函数,一次一个字节
void RS232_Init(); //串口初始化函数
void delay(int i, int n, int m); //延时函数
struct AXIE axie_1[3];
int reset_flag = 0; //是否复位标志,=1表示需要复位操作,=0表示不需要复位
int SW0_flag = 0; //SW0拨动按键标志,=0为初始值,=1时刚下拨,=2时刚上拨
int run_step; //自动搬物的工序步骤
int run_num = 5; //自动搬物的设定次数,初值为5(默认值)
int runing_num; //当前搬物的次数
int conveyorState = 0;
int boxStateFlag = 0; // 初始的时候
int suckerState = 0; // 初始的时候没有吸住
int count = 0; // 记录搬运次数
int auto_armState = 0; // 机械臂的初始位置,起始位置为0,抓取位置为1,释放位置为2
int conveyor2flag = 0; // 2号传送带初始位置
int box1State = 0;
// 手动速度
unsigned char leftSpeed = 0x32;
unsigned char rightSpeed = 0x36;
unsigned char auto_leftSpeed = 0x32;
unsigned char auto_rightSpeed = 0x36;
int resetArray[7] = {0}; // 记录当前操作位置
// 控制2号传送带
void conveyor() {
u32 stateFlag; // 记录是BTNC的按下信息
stateFlag = DATA_2_RO & 0x00000010;
if (stateFlag == 0x00000010 && conveyorState == 0) {
unsigned char modbus_open[] = { '#', '6', '1', '0', '0', '0', '0', '0',
'0' };
send_Char_9(modbus_open);
delay(1000, 100, 1000);
conveyorState = 1;
} else if (stateFlag == 0x00000010 && conveyorState == 1) {
unsigned char modbus_close[] = { '#', '6', '2', '0', '0', '0', '0', '0',
'0' };
send_Char_9(modbus_close);
delay(1000, 100, 1000);
conveyorState = 0;
}
return;
}
/**
* 吸盘:
* 1) BTNU 抓起
* 2) BTND 放下
*/
void sucker() {
unsigned char sucker_modbus[] = { '#', '5', '0', '0', '0', '0', '0', '0',
'0' };
u32 BTNUD_FLAG;
BTNUD_FLAG = DATA_2_RO & 0x00000003;
switch (BTNUD_FLAG) {
case 0x00:
break;
case 0x01: // 按下BTNU,吸住
if (suckerState == 0) {
sucker_modbus[2] = '1';
send_Char_9(sucker_modbus);
suckerState = 1;
}
break;
case 0x02: // 按下BTND,放下
if (suckerState == 1) {
sucker_modbus[2] = '2';
send_Char_9(sucker_modbus);
suckerState = 0;
}
break;
default:
break;
}
}
/**
* 手动模式控制机械臂
* 使用sw2sw1sw0控制
*/
void maArms() {
// 指令初始化数组
unsigned char arm_modbus[9] =
{ '#', '1', '0', '0', '0', '0', '0', '0', '0' };
// 记录选择机械臂
u32 armsFlag;
armsFlag = DATA_2_RO & 0x00001C00; // 1.读取sw2sw1sw0
// unsigned char leftSpeed = 0x32; // 左转顺时针
// unsigned char rightSpeed = 0x36; // 右转逆时针
u32 direFlag; // 控制方向
int Lflag = 0, rflag = 0;
// 记录BTNR和BTNL
direFlag = DATA_2_RO & 0x0000000C;
switch (armsFlag) {
case 0x00000000:
DATA_2 = (DATA_2 | 0x00012000) & 0xFFE13FFF;
break;
case 0x00001000: // 001 1号
DATA_2 = (DATA_2 | 0x00112000) & 0xFFF13FFF;
if (direFlag == 0x4) { // 左
arm_modbus[2] = leftSpeed;
send_Char_9(arm_modbus);
resetArray[1] ++;
delay(1000, 100, 100);
} else if (direFlag == 0x8) { // 右
arm_modbus[2] = rightSpeed;
send_Char_9(arm_modbus);
resetArray[1] --;
delay(1000, 100, 100);
}
break;
case 0x00000800: // 010 2号
DATA_2 = (DATA_2 | 0x00092000) & 0xFFE93FFF;
if (direFlag == 0x4) { // 左
arm_modbus[3] = leftSpeed;
send_Char_9(arm_modbus);
resetArray[2] ++;
delay(1000, 100, 100);
} else if (direFlag == 0x8) { // 右
arm_modbus[3] = rightSpeed;
send_Char_9(arm_modbus);
resetArray[2] --;
delay(1000, 100, 100);
}
break;
case 0x00001800: // 011 3号
DATA_2 = (DATA_2 | 0x00192000) & 0xFFF93FFF;
if (direFlag == 0x4) { // 左
arm_modbus[4] = leftSpeed;
send_Char_9(arm_modbus);
resetArray[3] ++;
delay(1000, 100, 100);
} else if (direFlag == 0x8) { // 右
arm_modbus[4] = rightSpeed;
send_Char_9(arm_modbus);
resetArray[3] --;
delay(1000, 100, 100);
}
break;
case 0x00000400: // 100 4号
DATA_2 = (DATA_2 | 0x00052000) & 0xFFE53FFF;
if (direFlag == 0x4) { // 左
arm_modbus[5] = leftSpeed;
send_Char_9(arm_modbus);
resetArray[4] ++;
delay(1000, 100, 100);
} else if (direFlag == 0x8) { // 右
arm_modbus[5] = rightSpeed;
send_Char_9(arm_modbus);
resetArray[4] --;
delay(1000, 100, 100);
}
break;
case 0x00001400: // 101 5号
DATA_2 = (DATA_2 | 0x00152000) & 0xFFF53FFF;
if (direFlag == 0x4) { // 左
arm_modbus[6] = leftSpeed;
send_Char_9(arm_modbus);
resetArray[5] ++;
delay(1000, 100, 100);
} else if (direFlag == 0x8) { // 右
arm_modbus[6] = rightSpeed;
send_Char_9(arm_modbus);
resetArray[5] --;
delay(1000, 100, 100);
}
break;
case 0x00000C00: // 110 6号
DATA_2 = (DATA_2 | 0x000D2000) & 0xFFED3FFF;
if (direFlag == 0x4) { // 左
arm_modbus[7] = leftSpeed;
send_Char_9(arm_modbus);
resetArray[6] ++;
delay(1000, 100, 100);
} else if (direFlag == 0x8) { // 右
arm_modbus[7] = rightSpeed;
send_Char_9(arm_modbus);
resetArray[6] --;
delay(1000, 100, 100);
}
break;
default:
DATA_2 = (DATA_2 | 0x00012000) & 0xFFE13FFF;
break;
}
reset_flag = 1;
}
/**
* 使用BTN8控制1号传送带上的箱子
*/
void boxState() {
u32 stateFlag; // 记录是BTN8的按下信息
stateFlag = DATA_1_RO & 0x00040000;
if (stateFlag == 0x00040000 && boxStateFlag == 0) {
unsigned char modbus_open[] = { '#', '4', '1', '0', '0', '0', '0', '0',
'0' };
send_Char_9(modbus_open);
delay(1000, 100, 100);
boxStateFlag = 1;
} else if (stateFlag == 0x00040000 && boxStateFlag == 1) {
unsigned char modbus_close[] = { '#', '4', '0', '0', '0', '0', '0', '0',
'0' };
send_Char_9(modbus_close);
delay(1000, 100, 100);
boxStateFlag = 0;
}
return;
}
/**
* 控制2号传送带上的LED显示
*/
void counter() {
unsigned char counter_modbus[][9] = { { '#', '7', '0', '1', '1', '1', '1',
'1', '1' }, //0
{ '#', '7', '0', '0', '0', '0', '1', '1', '0' }, //1
{ '#', '7', '1', '0', '1', '1', '0', '1', '1' }, //2
{ '#', '7', '1', '0', '0', '1', '1', '1', '1' }, //3
{ '#', '7', '1', '1', '0', '0', '1', '1', '0' }, //4
{ '#', '7', '1', '1', '0', '1', '1', '0', '1' }, //5
{ '#', '7', '1', '1', '1', '1', '1', '0', '1' }, //6
};
// 根据当前的次数发送命令
send_Char_9(counter_modbus[count]);
delay(100, 10, 10);
}
// 初始状态 -> 抓取状态
void armsState1() {
// 1.顺时针56度
axie_1[1].cur_position = 0;
axie_1[1].target_position = 56; // 304
axie_1[1].direction = 1;
// 2.顺时针22度
axie_1[2].cur_position = 0;
axie_1[2].target_position = 22;
axie_1[2].direction = 1;
// 3.逆时针76度
axie_1[3].cur_position = 0;
axie_1[3].target_position = 74; // 287
axie_1[3].direction = -1;
// 4.不动
axie_1[4].cur_position = 0;
axie_1[4].target_position = 0;
axie_1[4].direction = 0;
// 5.顺时针142度
axie_1[5].cur_position = 0;
axie_1[5].target_position = 138;
axie_1[5].direction = 1;
// 6.不动
axie_1[6].cur_position = 0;
axie_1[6].target_position = 0;
axie_1[6].direction = 0;
}
// 抓取状态 -> 释放状态
void armsState2() {
// 1.逆时针44度
axie_1[1].cur_position = -56;
axie_1[1].target_position = 50;
axie_1[1].direction = -1;
// 2.
axie_1[2].cur_position = 22;
axie_1[2].target_position = 28;
axie_1[2].direction = 1;
// 3.逆时针76度
axie_1[3].cur_position = 266;
axie_1[3].target_position = 287;
axie_1[3].direction = -1;
// 4.逆时针
axie_1[4].cur_position = 0;
axie_1[4].target_position = 0;
axie_1[4].direction = -1;
// 5.顺时针142度
axie_1[5].cur_position = 138;
axie_1[5].target_position = 150;
axie_1[5].direction = 1;
// 6.顺时针
axie_1[6].cur_position = 0;
axie_1[6].target_position = 16;
axie_1[6].direction = 1;
}
// 释放状态 -> 抓取状态
void armsState3() {
// 1.逆时针44度
axie_1[1].cur_position = -56;
axie_1[1].target_position = 50;
axie_1[1].direction = 1;
// 2.
axie_1[2].cur_position = 22;
axie_1[2].target_position = 28;
axie_1[2].direction = -1;
// 3.逆时针76度
axie_1[3].cur_position = 266;
axie_1[3].target_position = 287;
axie_1[3].direction = 1;
// 4.逆时针
axie_1[4].cur_position = 0;
axie_1[4].target_position = 0;
axie_1[4].direction = 1;
// 5.顺时针142度
axie_1[5].cur_position = 138;
axie_1[5].target_position = 150;
axie_1[5].direction = -1;
// 6.顺时针
axie_1[6].cur_position = 0;
axie_1[6].target_position = 16;
axie_1[6].direction = -1;
}
// 自动模式下机械臂的移动
void auto_move() {
int a[] = { 2, 3, 4, 5, 6, 1 };
int i;
for (i = 0; i < 6; i++) {
int index = a[i];
unsigned char modbus[] = { '#', '1', '0', '0', '0', '0', '0', '0', '0' };
int dire = axie_1[index].direction;
int cnt = (axie_1[index].target_position - axie_1[index].cur_position)
/ 2;
if (dire == 1) {
modbus[index + 1] = auto_leftSpeed;
} else if (dire == -1) {
modbus[index + 1] = auto_rightSpeed;
}
while (cnt--) {
send_Char_9(modbus);
}
}
}
// 自动模式
void autoWork() {
if (count > 6) return ;
// 首先开启2号传送带
if (conveyor2flag == 0) {
unsigned char modbus_open[] = { '#', '6', '1', '0', '0', '0', '0', '0',
'0' };
send_Char_9(modbus_open);
conveyor2flag = 1;
}
if (box1State == 0) {
// 机械臂在开始运作之前先出箱子
unsigned char box_modbus[] = { '#', '4', '1', '0', '0', '0', '0', '0', '0' };
send_Char_9(box_modbus);
box1State = 1;
delay(1000, 1000, 1000); // 该延迟时间需要调试
}
// 吸盘控制命令
unsigned char sucker_modbus[] = { '#', '5', '0', '0', '0', '0', '0', '0', '0' };
switch (auto_armState) {
case 0:
armsState1(); // 初始化参数
auto_move();
auto_armState = 1;
delay(1000, 100, 100);
break;
case 1: // 在1号传送带上方
// 准备吸住箱子
if (suckerState == 0) {
sucker_modbus[2] = '1';
send_Char_9(sucker_modbus);
suckerState = 1;
}
armsState2(); // 初始化参数
// 吸住箱子后再移动到2号传送带
auto_move();
auto_armState = 2;
break;
case 2:
// 先将箱子放下
if (suckerState == 1) {
sucker_modbus[2] = '2';
send_Char_9(sucker_modbus);
suckerState = 0;
}
// 计数器++
delay(1000, 1000, 1000);
count++;
box1State = 0; // 没有1号箱子
// 将机械臂移回1号传送带
armsState3(); // 加载坐标
auto_move();
auto_armState = 1;
break;
}
}
// 手动模式下复位机械臂
void resetArms() {
int i;
for (i = 1; i<= 6; i ++) {
unsigned char arm_modbus[9] = { '#', '1', '0', '0', '0', '0', '0', '0', '0' };
if (resetArray[i] >= 0) {
arm_modbus[i + 1] = rightSpeed;
} else if (resetArray[i] < 0) {
arm_modbus[i + 1] = leftSpeed;
}
int cnt = resetArray[i] > 0 ? resetArray[i] : 0 - resetArray[i];
while (cnt --) {
send_Char_9(arm_modbus);
}
}
for (i = 0; i < 7; i ++) {
resetArray[i] = 0;
}
reset_flag = 0;
}
/**
* 改变移动的速度,这里需要调整实现,当前实现不可行
*/
void changeSpeed() {
u32 btnFlag;
// 记录BTNR和BTNL
btnFlag = DATA_2_RO & 0x0000000C;
switch(btnFlag) {
case 0x4: // -
if (leftSpeed > '0' && rightSpeed > '5') {
leftSpeed --;
rightSpeed --;
delay(1000,100,100);
}
break;
case 0x8: // +
if (leftSpeed < '5' && rightSpeed < '9') {
leftSpeed ++;
rightSpeed ++;
delay(1000,100,100);
}
break;
}
}
int main() {
u32 flag, flag1; //变量flag用于记录SW0~SW7按键按下信息;变量flag1用于记录BTN8、BTN9按键按下信息
u32 flag_mode1; // 记录sw4和sw3
//注:下面MIO引脚和EMIO引脚的序号是统一编号的,MIO序号为0~31及32~53,EMIO序号为54~85及86~117
//配置及初始化MIO07引脚的相关寄存器,MIO07作为LED灯控制的输出引脚
MIO_PIN_07 = 0x00003600;
DIRM_0 = DIRM_0 | 0x00000080;
OEN_0 = OEN_0 | 0x00000080;
//配置及初始化MIO50、MIO51引脚的相关寄存器,MIO50、MIO51作为按键输入引脚
MIO_PIN_50 = 0x00003600;
MIO_PIN_51 = 0x00003600;
DIRM_1 = DIRM_1 & 0xFFF3FFFF;
//初始化EMIO54~EMIO58的引脚,它们对应BTNU、BTND、BTNL、BTNR、BTNC按键,输入
DIRM_2 = DIRM_2 & 0xFFFFFFE0;
//初始化EMIO59~EMIO66的引脚,它们对应SW7~SW0拨动开关,输入
DIRM_2 = DIRM_2 & 0xFFFFE01F;
//初始化EMIO67~EMIO74的引脚,它们对应LED7~LED0,输出
DIRM_2 = DIRM_2 | 0x001FE000;
OEN_2 = OEN_2 | 0x001FE000;
//初始化UART1
RS232_Init();
while (1) {
//读模式信息,即读SW7、SW6的输入信息
flag = DATA_2_RO & 0x00000060;
boxState();
conveyor();
switch (flag) {
case 0x00: //复位模式
DATA_2 = DATA_2 & 0xFFE01FFF; //模式指示灯LED7~LED0灭
if (reset_flag == 1)
resetArms();
break;
case 0x20: //手动控制模式
DATA_2 = (DATA_2 | 0x00002000) & 0xFFFFBFFF; //模式指示灯LED7亮、LED6灭
/*
* 使用sw4和sw3两位来控制当前是操作传送带、机械臂还是吸盘
* sw4sw3: 01 空位:可以用来实现其他功能
* sw4sw3: 10 机械臂
* sw4sw3: 11 吸盘
* 操作步骤:
* 1)使用 DATA_2 获取sw3和sw4的输入
* */
// counter();
// 此时,记录sw4sw3信息,所以查看的位数是0x0000_0360
flag_mode1 = DATA_2_RO & 0x00000300;
switch (flag_mode1) {
// 此时不做操作,不发送指令
case 0x0000:
DATA_2 = DATA_2 & 0xFFE03FFF; // 保持手动模式下LED7和LED6灯亮
break;
case 0x0200: // 传送带 sw4sw3:01 LED7亮 LED6灭 LED4灭 LED3亮
DATA_2 = (DATA_2 | 0x00022000) & 0xFFFEBFFF;
// 调速度,这个函数没有实现成功,我猜测是全局变量
// leftSpeed和rightSpeed的初始值问题
// 我这里使用的是十六进制的数,或许改为char类型的初始值'2'这样的表示可以成功
// changeSpeed();
break;
case 0x0100: // 机械臂 sw4sw3:10
DATA_2 = (DATA_2 | 0x00012000) & 0xFFFDBFFF;
maArms();
break;
case 0x0300: // 吸盘 sw4sw3: 11
DATA_2 = (DATA_2 | 0x00032000) & 0xFFFFBFFF;
sucker();
break;
}
break;
case 0x40: //自动控制模式
DATA_2 = (DATA_2 | 0x00004000) & 0xFFFF7FFF; //LED7灭、LED6亮
// if (count > 6) break;
autoWork();
counter();
break;
case 0x60: //机械臂示教模式(该模式暂不实现)
DATA_2 = DATA_2 | 0x00006000; //LED7亮、LED6亮
break;
}
}
return 0;
}
//9个字节数据的发送函数
void send_Char_9(unsigned char modbus[]) {
int i;
char data;
for (i = 0; i < 9; i++) {
data = modbus[i];
send_Char(data);
delay(100, 10, 10); //延时
}
}
//单个字节数据的发送函数
void send_Char(unsigned char data) {
while ((rChannel_sts_reg0 & 0x10) == 0x10)
;
rTx_Rx_FIFO0 = data;
}
//UART1的初始化函数
void RS232_Init() {
rMIO_PIN_48 = 0x000026E0;
rMIO_PIN_49 = 0x000026E0;
rUART_CLK_CTRL = 0x00001402;
rControl_reg0 = 0x00000017;
rMode_reg0 = 0x00000020;
rBaud_rate_gen_reg0 = 62;
rBaud_rate_divider_reg0 = 6;
}
//延时函数
void delay(int n, int m, int p) {
int i, j, k;
for (i = 1; i <= n; i++) {
for (j = 1; j <= m; j++) {
for (k = 1; k <= p; k++) {
}
}
}
}
总结
以上实现只是实现了基本功能,更多的功能可以扩展:
- 如按钮BTN9未使用,可以使用这个按钮来实现自动模式暂停功能,大概思路是500行的while循环里面做一个判断,按下BTN9后实现暂停;
- resetArray数组是记录当前机械臂的操作次数,顺时针操作一次,相应位+1,逆时针,相应位-1,或许可以将这个功能扩充到自动模式下复位;
- ……
最后,附上完整的工程,记得给我点个赞
wangs/硬件课程设计II - 码云 - 开源中国 (gitee.com)
GZ-WangSong/Hardware-course-Design-II (github.com)
总结
以上实现只是实现了基本功能,更多的功能可以扩展:
- 如按钮BTN9未使用,可以使用这个按钮来实现自动模式暂停功能,大概思路是500行的while循环里面做一个判断,按下BTN9后实现暂停;
- resetArray数组是记录当前机械臂的操作次数,顺时针操作一次,相应位+1,逆时针,相应位-1,或许可以将这个功能扩充到自动模式下复位;
- ……
最后,附上完整的工程,记得给我点个赞
















 858
858











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











