







「内卷」
当我在与汽车行业的朋友聊今年的行业态势时,听到最多的词。
销量见顶,增速下滑,迟迟找不到新的增长点。从东风雪铁龙官宣降价开始,众多车企只能无奈跟牌,让渡利润,保证自己在牌桌上停留的时间更长。
2023 年 7 月,梅雨季节,整个上海被笼罩在湿润高压的的气流里,闷热却又无可奈何,就像今年的汽车行业,在等待一个出口。
自动驾驶行业也未能幸免,2023 年,行业急转直下,明星独角兽小马智行宣布裁员,美国头部自动驾驶公司 Argo AI 宣布解散,擎天智卡清盘。
从炙手可热到视作敝履,竟然不到一年时间。
原因其实并不复杂,L4 商业规模化推广迟迟未能到来,而从 L4 到 L2 的转型必然面临阻碍,也必然会有人被淘汰。
那么中国自动驾驶行业如何了?
这次嘉定举办的中国汽车行业论坛上,于骞给出了轻舟智航的答案:致力将中国方案打造成为全球标准,我们相信中国智造和中国标准的自动驾驶汽车将在全球范围内拥有一席之地。
01
自动驾驶公司转型的阵痛期已过
2021 年底,L4 自动驾驶公司降维 L2 的浪潮开始显现,转型必然面对质疑。学术能力似乎与工程能力成了首鼠两端,关于 Demo 如何推广到量产,没有人可以很快回答。
缺乏经验的自动驾驶公司们进入一个陌生的工程领域,竞赛榜单刷点的荣耀并没有让工程化变得更加轻松。
舒适区是一个小范围运转的自动驾驶算法,可以单独测绘高精地图,可以在地图上埋点,可以对某条路做好定向优化,Demo 出来永远是惊艳的无接管。

面对量产车,无法被定义好的可用范围,你永远不能假定用户到底要把这辆车开去哪里,也不知道未来到底会发生什么。
转型的自动驾驶公司被架在火上烤,主要有两个核心:
一,OEM 的降本需求。
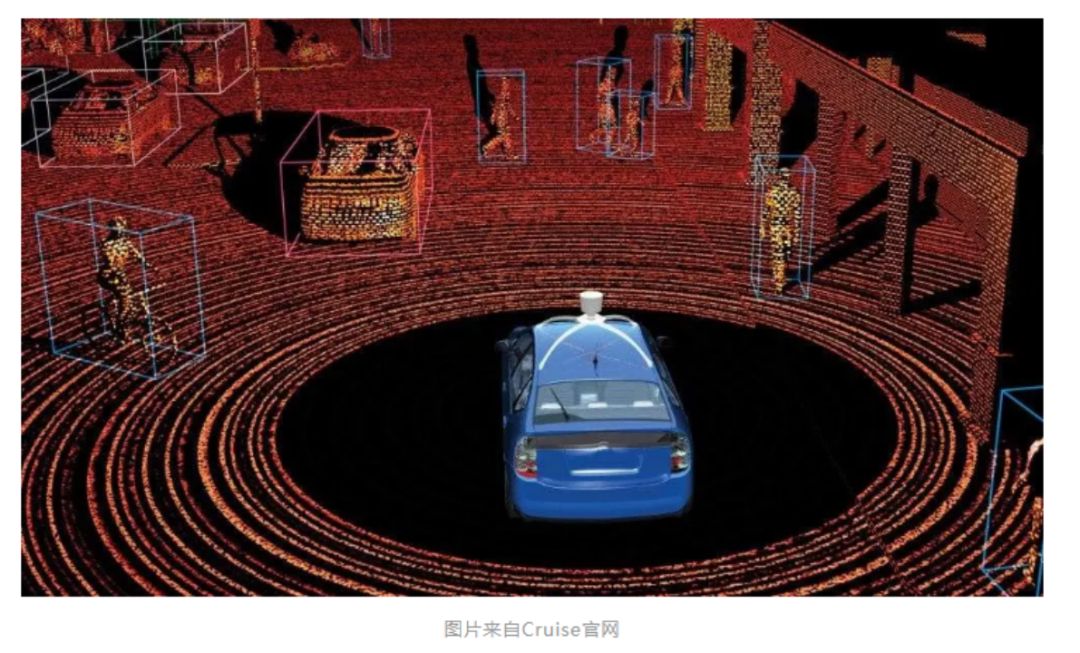
以前 L4 级别的硬件不能被使用,激光雷达无法装在车顶,无法提供 360 度的感知,一般只有 120 度左右的范围。
相当于本来正常开车的人,眼前被蒙了一层白纱,而且眼睛不能左右看。
算力无法无限制使用,需要时刻满足时延要求,感知的结果必须要实时给出,还需要为其他功能预留算力。
这就像工程队原来有 100 人,现在可能只有 50 人了,还要分一半给别的工程。
当产业解决了硬件的布置问题,最核心的是硬件的成本无法下降,至少目前行业的整体成本能力还没有达到自动驾驶公司和主机厂的理想型。
二,对功能的水准的要求。
上面我们说了成本,从 L4 动辄百万的自动驾驶系统,现在已量产的乘用车方案里在成本上已经有了长足的进步,目前一套满足城市 NOA 的系统(软件 + 硬件)一颗禾赛/图达通;7 颗摄像头;两块 Orin X;四颗毫米波雷达,综合成本大约可以做到 3 万以内。
但这作为整车的 BOM 成本依然不便宜,而现在随着车企对于功能水准的要求变大,高速 NOA、城市 NOA、自动泊车,可用范围要比竞品车型要大。
也就是说,硬件推倒重来,算法可能需要重写。
不同的运行范围和传感器配置,数据需要重新调整,与原有工控机完全不一样量产芯片适配,对应的神经网络算子也可能有重写的必要。
L4 公司从室内游泳池里学会的高超游泳技巧,面对开放世界的大江大河,很多经验失效了。
一切几乎重新开始。
例如一个看似简单的 AEB 功能,为了保证功能安全,为了保证误触发次数在安全范围内。那么需要海量的数据进行训练,保证不因为异形车、路面低矮障碍物、鬼影等等进行误触发。
这些在之前的 L4 工程里,可能并不重要,因为 L4 的策略标定只要保证绝对的「安全」优先级第一。
这些完成之后,还有一个灵魂拷问,这个误触发率和正向触发表现为什么比不上 Mobileye?
而 Mobileye 成立于 1999 年,2008 年就提供了 Eye Q1 芯片,目前出货量已经超过一亿片。
也就是说,Mobileye 至少是 15 年的视觉 AEB 积累和超过一亿量产车集成的经验。自动驾驶公司们,需要用自己的算法和工程能力与这些经验进行赛跑。
一个嗷嗷待哺的孩子,对手是经验丰富的成年巨龙,难度可想而知。
几乎从零开发的 L2 功能的自动驾驶公司们,面对 OEM 提出的对标 Mobileye 的需求时,都发现算法不是全部,开始手足无措。
因此在过去的两年,质疑声四起,算法能力面对工程能力是否不重要。
好在依然有着务实的自动驾驶公司,低下了高昂的算法工程师的头颅,认真理解 OEM 的交付需求,并一点点实现,并且用工程化的能力成功打动了主机厂,拿到量产订单,安全度过了阵痛期。
- Momenta 成功地在智己上量产高速 NOA 功能,也开始开发城市 NOA 功能;
- 地平线用开放的姿态与车企合作,在 L2+ 智能驾驶芯片领域与 Nvidia 平分秋色,获得 49.05% 的市场占有率;
- 大疆在五菱宏光 KIWI 上成功证明自己智能驾驶绝对实力;
- 轻舟智航也获得几家车企定点,尤其是高速NOA功能受到好评。不久我们将会看到轻舟的方案跑满大街小巷。
质疑声开始逐渐变小,车企在逐渐接受本土供应商们,这不是一件容易的事。
那么这些公司做对了什么?
自动驾驶系统是一个软硬结合的产品,即要有对自动驾驶技术趋势的前瞻判断,又要求供应商具有极强的工程能力,对自动驾驶科技公司的要求更是如此,地平线是一家芯片公司,但余凯博士要求团队要有极强的算法能力,从理想 AD Pro 的能力来看,显然地平线做到了。
轻舟智航这样的软件算法公司,同时要具备硬件定义的能力。此前轻舟设计的 Driven-by-QCraft multi-sensor fusion suite(Gen 4)第 4 代多传感器套件方案,在最新的 IF 2023 年度获奖名单中,从来自 56 个国家的参赛作品 11000 件杀出重围,成为唯一一件自动驾驶公司打造的获奖作品。
轻舟智航,正式宣布战略转型甚至是在 2022 年5月,一年多时间,如何以「轻快 、高效」的轻舟速度拿到量产定点的?
02
轻舟智航做对了什么
L4 的技术积累让轻舟快速转型
从 L4 的感知切换到 L2 级别感知,为什么难度这么大?
感知硬件不一致,整体传感器输入格式和内容与L4差异太大了。如果L4感知算法没有足够好的鲁棒性,或者说为了Demo 做了过多规则化妥协,诸如某个路口检测到某个红绿灯应该如何反应;某种检测结果如果置信度,但是在某个路口可以提高置信度。
这也就是我们常说的 Overfitting。
显然这种算法不具备泛化能力,鲁棒性很差,很难推广应用。
而轻舟自成立到现在积累的感知和多传感器融合能力,经受住了泛化性和鲁棒性考验。
其实自动驾驶的算法,从感知到规控存在明显分层,一方面学术界的论文层出不穷;另一方面工程界为基础的工程开发绞尽脑汁。从 L4 迈向 L2+ 的量产并不容易,它需要开发团队具有对未来算法演进的判断,这就是核心难点。
因为行业把注意力主要集中在特斯拉、蔚小理这样的自研主机厂身上,忽略了轻舟其实是国内最早开始规划并量产 BEV 大模型网络的科技公司,同时,轻舟智航在发展过程中积累出的对感知系统评价方式的创新,也为感知和规划控制的统一优化提供了更多机会,这也与端到端的自动驾驶趋势非常吻合。
根据最近机器学习顶会轻舟智航发表的文章,他们评价感知系统并不是通过单一的感知结果的真值对比进行评测,而是将规划控制的结果作为重要的评价指标。
也就是说,感知的误差如果没有让规划控制产生失败的结果,那么这种感知误差在某种程度上是可以被接受的。并不是直接去评价看得准不准,而是去评定感知结果出来之后,算法做的对不对。
这种直接面向功能表现的评价指标,让轻舟智航在面对主机厂苛刻的功能要求时,反而有了更多底气。算法开发时的目标与需求已经基本对齐,能够防止感知和规划各自进入局部最优,但是组合起来反而效果不好。
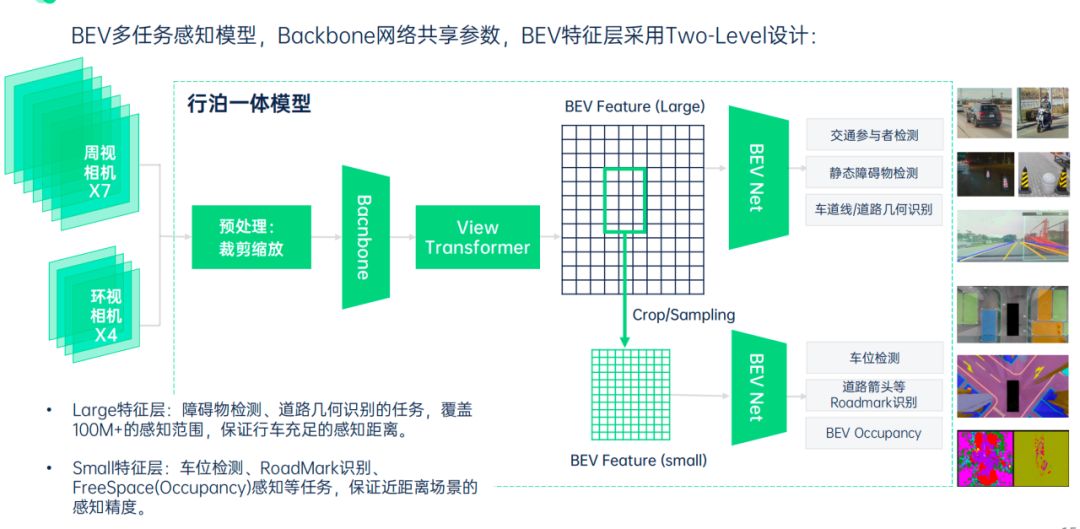
BEV 多任务模型感知能力
相较于 Mobileye EyeQ5 的方案,BEV 能够对周围环境做更加精准的感知。
从俯视图的角度,看到更多周围的交通参与者,多个摄像头共享的信息能够对半遮挡的物体做到精准感知,也能通过时序来推导物体的运动状态。这与传统的 2D 检测后转 3D 方案有着本质的区别,感知能力几乎是降维打击。
上帝俯视视角和人类视角有着本质的区别。
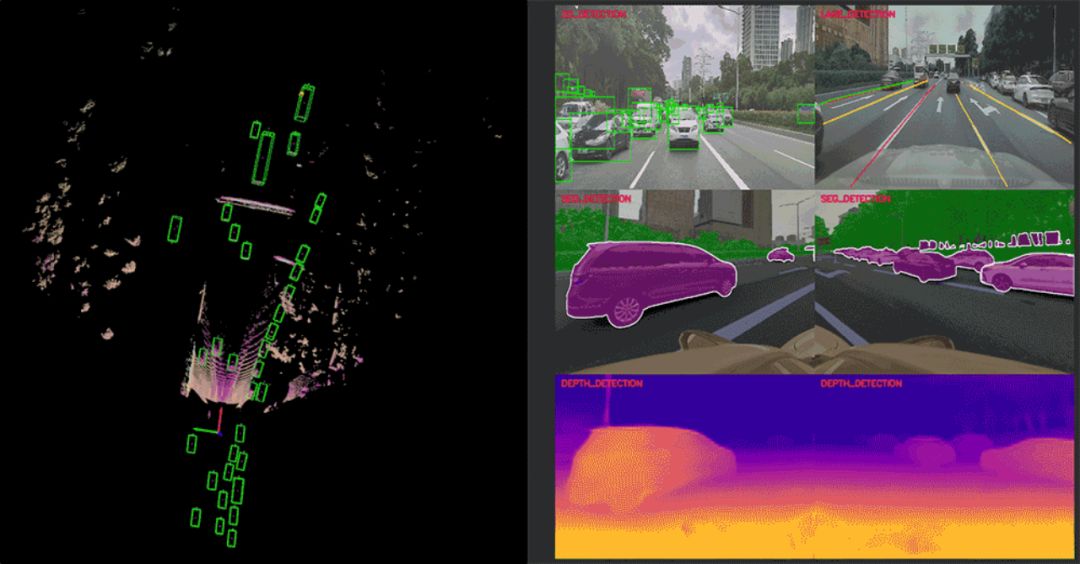
轻舟智航BEV 的多任务感知结果非常优秀,车道线识别、周围车流的精准语义识别、深度识别,都在同一个 BEV 任务中输出,共享同一个基础骨干网络的 Feature 有效节省了算力需求。
也就是说,原来多个神经网络才能完成的任务,现在主要由一个神经网络实现主要部分的计算,最终的任务都是在这个主要的神经网络上的结果进行推理。
在 BEV 整体架构的基础上,轻舟也做了工程化创新,通过前视 + 侧视 + 环视⻥眼共 11 个相机输⼊,来生成统一的 BEV 特征图,同时又将 BEV 特征图设计为不同分辨率的两层,根据近距离高精度的需要使用高分辨率,远距离使用低分辨率。
这样分别对行车和泊车有不同的子任务,满足行泊一体化的精度要求上,也能有效降低算力的使用。
高速 NOA 上典型的主动变道,上下匝道出现的功能失效退出,大部分都是感知对距离和速度估计准确度不够,而BEV方案的高准确度,能够让规划控制算法有着更多空间。
这也就为高速 NOA ,城市 NOA 打下了坚实的环境感知基础。
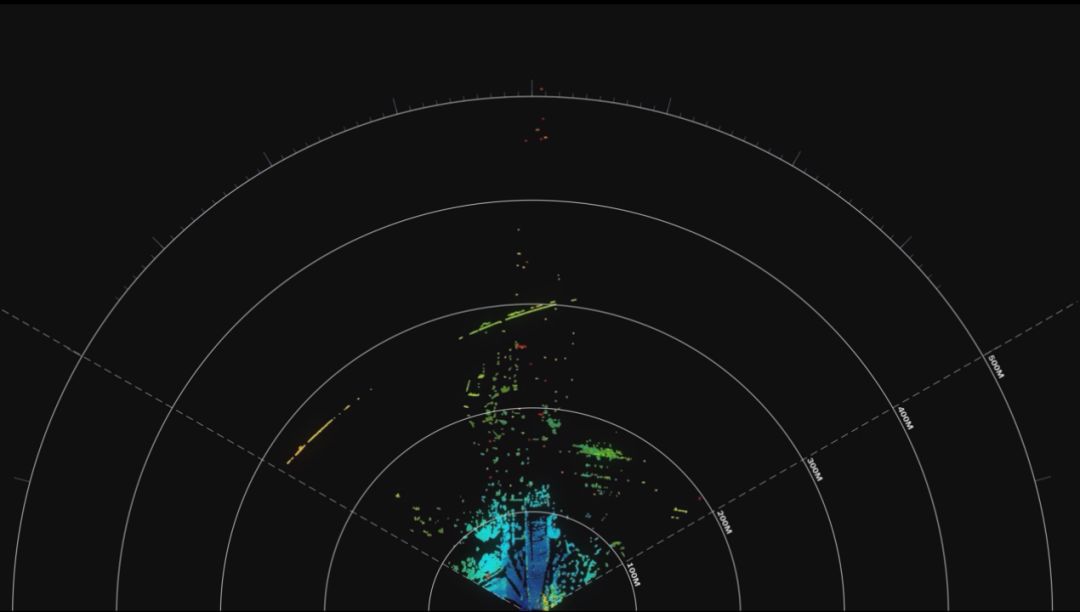
多传感器融合感知能力
说到融合算法策略,常见的有前融合(传感器信息共享之后输入网络),后融合(各个模块输出结果之后对结果进行融合),而轻舟智航提出超融合的概念,并没有将前融合和后融合严格个区分,而是按需使用传感器 Raw 数据,中间层特征,目标,时序信息等等。
确实,类似人类如何理解世界,我们可能是用眼睛看(感知),看的过程中可能回想起以前的经验(时序信息),结合听到的声音之后进行推理(后融合);也有可能我们一边听一边看,互相验证,共同得到对世界的认知(前融合或者中融合)。
这几种在人类认知世界的过程中并不会被显著区分,每个人都有自己的习惯,每个场景也不一样(超融合),但是都得到当下最优的感知结果。
这也是是轻舟智航的 OminiNet 的设计原则,将原始数据,一些神经网络中间层参数或者是神经网络输出结果进行融合,甚至在时序层面也可以共享多个时间窗口信息进行融合。
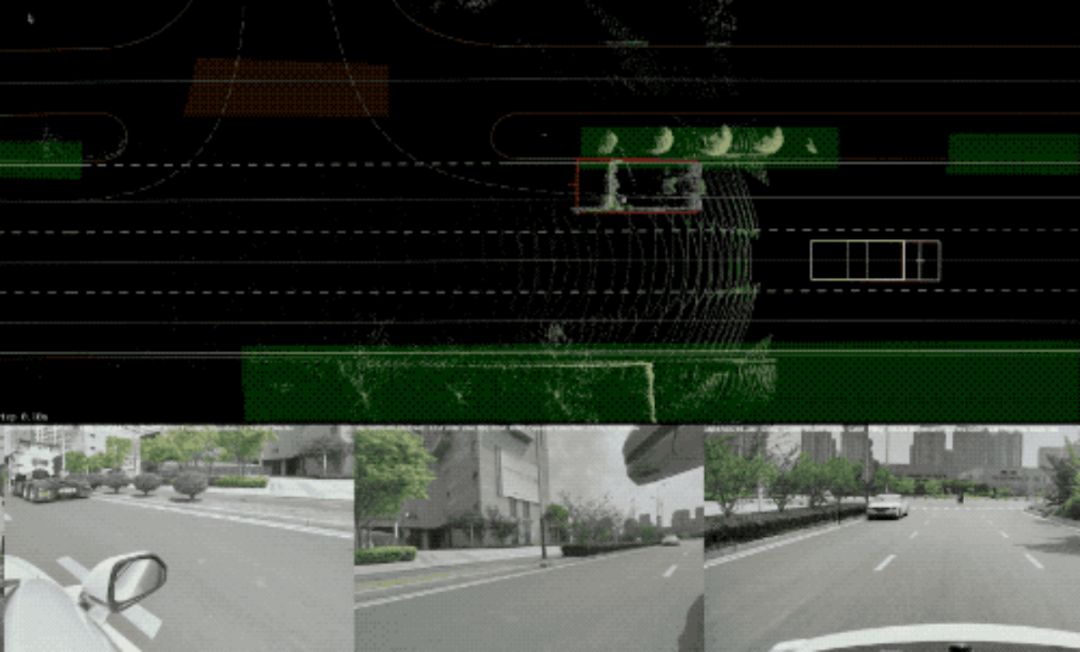
所以我们看到,整个感知从 3D 检测,到实时地图构建;从预测,到多物体的跟踪;从摄像头视觉感知到 Lidar 感知;多个任务被融合在一起,构建成一个多传感器特征和时序融合的大模型。
这种统一又灵活的构建方式,让每个传感器的信息得到充分利用。
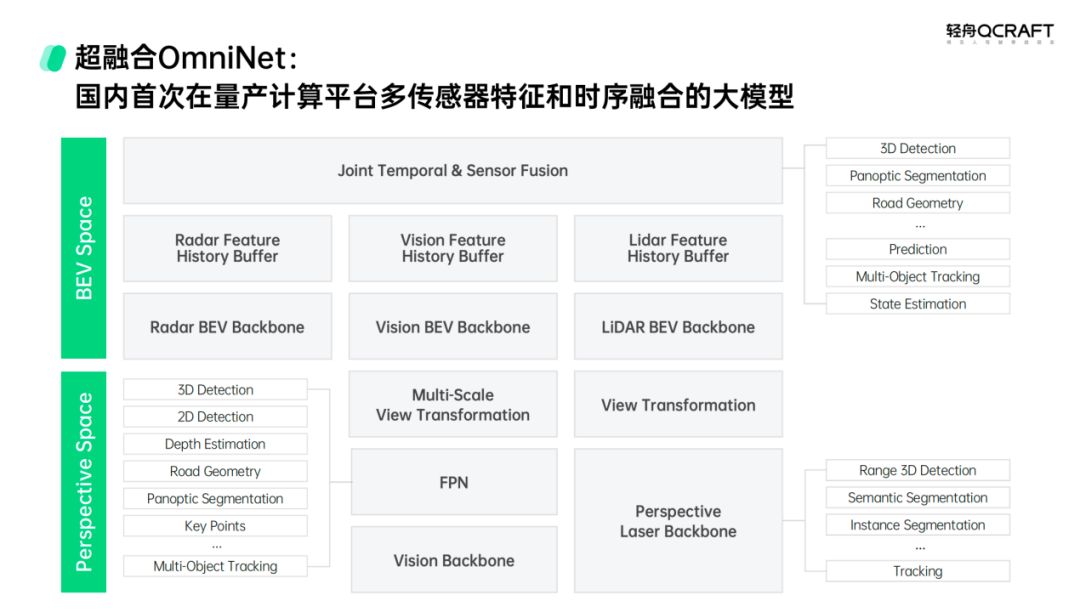
这与 CVPR 2023 Best Paper UniAD 的思路非常相似,可以使用 BEV 的 Feature 或者某个模块的融合结果作为输入,保证整个网络能够有足够多的信息,进行环境精准的感知。
例如异形大车的识别和跟踪,也不再是一个非常难以解决的任务。
这是轻舟对于解决感知的一些工程实践。
低成本的轻地图方案
很多 L4 公司早期的技术栈可能是地图埋点,高度依赖高精地图的路径信息进行规划控制。这也是很多 L4 公司无法进行大规模推广的原因之一。
在某一个小范围地图里进行大量的测试、适配,进而得到比较好的表现。
这就带来了非常可怕的结果,整个自动驾驶系统与这部分地图进行了高度绑定,整体的推广泛化的成本极高,对每一个新的区域都需要再次适配。
而量产辅助驾驶的运行范围显然不能只局限于某一个区域,甚至区域的拓展性也是互相竞争的重要指标。
轻舟智航自研的 QmapNet,实现了实时感知与导航地图(区别于高精地图,例如我们日常使用的高德,腾讯地图都属于此列,轻量化、成本低,但是定位精度和车道线需要算法保证)融合得到实时地图构建,支持城市复杂道路的行驶。
不需要依赖高精地图,也就不需要经常更新高精地图,同时在一些密级较高无法提供高精地图测绘的城市区域,也能够保证功能开启。
轻地图方案,为城市 NOA 的推广提供了非常广阔的空间。而轻舟已经具备这样的能力。

众所周知,由于城市布局的原因,轻地图在短时间内并不容易实现。但我相信,具有这一能力的轻舟智航,未来可以通过和图商携手实现「轻地图」的路线。
数字基建为核心的公司战略
在成立之初,轻舟就将数字基建放在了一个非常高的位置,例如数据闭环与仿真。 在自动驾驶行业内,公认轻舟智航拥有最强大的数据闭环工具链之一,内部可以自动化进行危险场景挖掘,可以支持算法不断的快速迭代和升级。
在 L4 为主要战略目标的时候,这部分基建就耗费了非常大的资源,当时甚至还有人看不懂轻舟的战略部署,将工程能力提升到如此的高度是否是舍本逐末。
事实证明,这些积累极大缩短了轻舟的转型之路。
优秀的数据闭环系统在开发 L2 级别的辅助驾驶方案时能够被直接复用,也大大降低了数据标注的时间成本,而当时积累的 L4 级别 仿真技术更是让轻舟的验证过程高度虚拟化并大大缩短。
行业内较早使用基于纯视觉的 NeRF(一种神经体素训练网络,可以使用纯视觉传感器完成周围环境的重建,但是计算资源耗费较大,重建精度需要算法保证)3D 重建技术和标注系统,这与 Tesla 的技术路径非常类似,可以从视觉中获得真值。
就像人类一样,可以直接通过眼睛学习整个世界的 3D 空间。
与此同时数据采集时,由于轻舟智航也有部分 Lidar 回传结果,也能直接获得一部分 3D 位置,精度也会大大提升。
数据回传之后,通过数据自动标注系统,很快能够得到真值,并且及时进行算法训练。同时,利用离线点云大模型,可以实现很多场景的自动挖掘,自动积累场景库。
这是其他公司不曾具备的优势。
而 3D 重建后的世界,也就保存了当时数据采集时行车的状态,这可以进入虚拟测试仿真世界,自由地对场景进行修改,例如添加某个危险物体,或者删除某个交通参与者,进行虚拟测试,也加快了验证的速度。
厚积薄发,执着得到了回报。
03
自动驾驶下半场的关键词:中国自动驾驶
L4 级别自动驾驶迟迟无法商业化的今天,自动驾驶公司们躬身降级,用自己 L4 自动驾驶开发的积累赋能 L2,过程也许很艰难也会面临质疑。
但是真正优秀,坚韧的公司从来不会被行业趋势淘汰,而是在变化中开发更加优秀的产品。
- 我看到小鹏和华为在城市 NOA 上的巨大突破,引领行业发展;
- 我也看到了地平线在高算力芯片上的突围,斩获上百个车型定点;
- 我看到中国激光雷达厂商们后来居上,用出货量宣布王座易主;
- 我还看到轻舟智航们在算法和工程集成上的努力和车型定点回报,用行动反击质疑。
从软件到硬件,从算法到工程集成,都有对应的公司占据了关键位置,时刻准备参与全球竞争。
作为智能驾驶行业的观察者,我觉得我极度幸运,能看到整个产业链逐渐成熟,一幅巨大的,全球唯一的智能驾驶产业版图正在徐徐在我面前展开。
在 2023 年 6 月 21 日,工信部也宣布要支持 L3 级别的自动驾驶立法。
几乎同时,CVPR,全球计算机视觉顶级会议中最佳论文由中国自动驾驶团队获得。
山雨欲来风满楼,自动驾驶行业真正有意思的时刻正在到来。















 222
222











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









