







1.文章简介
本文介绍了一种基于标定多视角的多人三维姿态估计和跟踪方法,与以前从多个视图构建3D姿势的解决方案相比,其方法利用时间一致性来匹配每个视图中用以前构建的3D骨架估计的2D姿势,提出了一种2D-3D关联的部分感知测量方法和一种可以在重建过程中处理2D异常值的滤波器。
2.整体框架
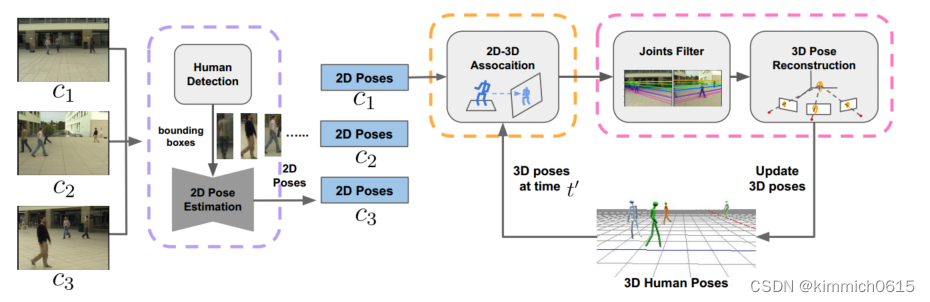
a.第一步是对多个视角的图片进行2D的姿态检测,采用的是yolov3与HRnet所结合的自上而下的人体姿态检测器
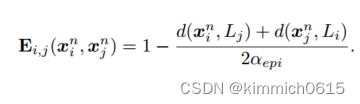
b.产生的2D姿态随后进行2D-3D Association,这块会和t’时刻产生的3Dpose的投影进行计算亲和函数,如下图

计算出各个时刻2D与3D的亲和值,就可以形成亲和矩阵将2D与3D关联起来,并通过匈牙利算法进行求解,找到匹配。
3D姿态是由直接线性变换(DLT)来进行三角测量获得,当所有关节错误时,会产生Xt,miss,这时用Xt^代替,并加入高斯滤波器来平滑。
c.为了防止关联时只有单一视图,不能进行重建,在joint filter,其构建一个集合,在t-tc’<e,e=75~100ms这个时间段里,tc'代表上一次匹配到的时间,在这个短间隔中进行三角测量,随后进入joint filter,这是一步joint感知处理,通过计算以下式子来进行去除异常值,如下图示意图
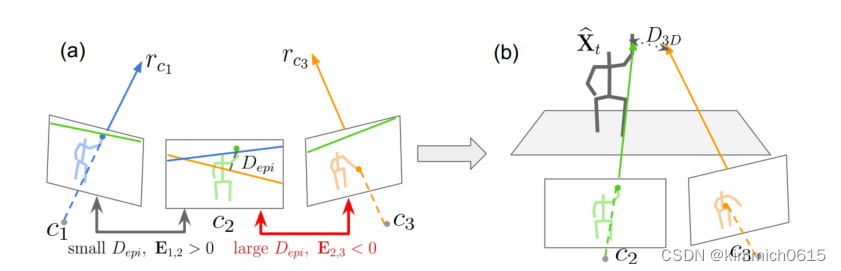
c2的图像平面上的蓝色线和橙色线分别是反向投影射线rc1、rc3的核线。由于大的核极距离,视图c2和c3中的关节被认为是异常候选,因此在下一步骤中进行检查。当Eij<0,则可以判断i,j中有一个会有问题,则其设计了一个贪婪算法,将Xt,n与运动模型进行对比,背投影光线可由下式子得到

随后计算ric与xtn之间的距离 ,然后将n=i或者j中大的一个去掉。
对于那些来自不同视图的不匹配的二维姿势,可能会形成一个新的三维骨架。因此,为了初始化新的3D姿势,利用极线约束在视图中关联不匹配的2D姿势。假设在相机c中存在一组不匹配的2D姿势的Uc,通过等式来测量来自其他视图的不匹配2D姿势与Uc的相关性。最终亲和矩阵E=PN n=1En也可以通过匈牙利算法求解。这个过程是迭代的,意味着我们一个接一个地处理相机。在每次关联之后,可能仍然存在未在相机c中捕捉到但在其他相机中捕捉到的不匹配姿势U 0 c。然后将U0 c添加到Uc中

这是整体框架
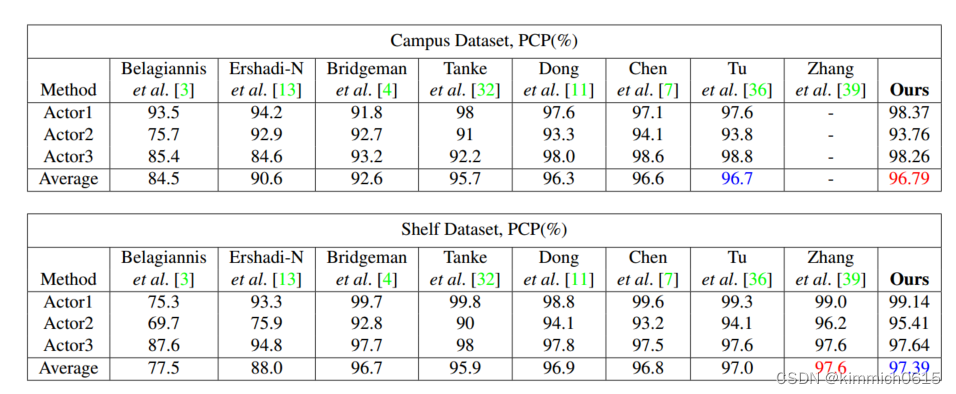
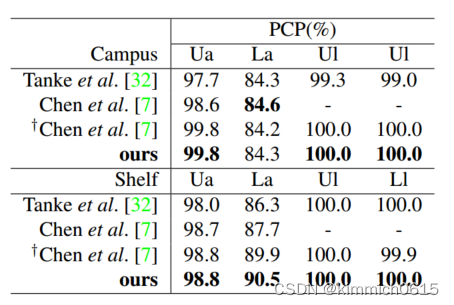
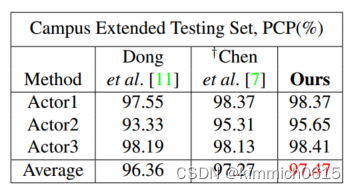
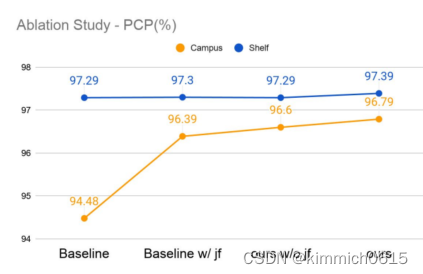
3.实验数据
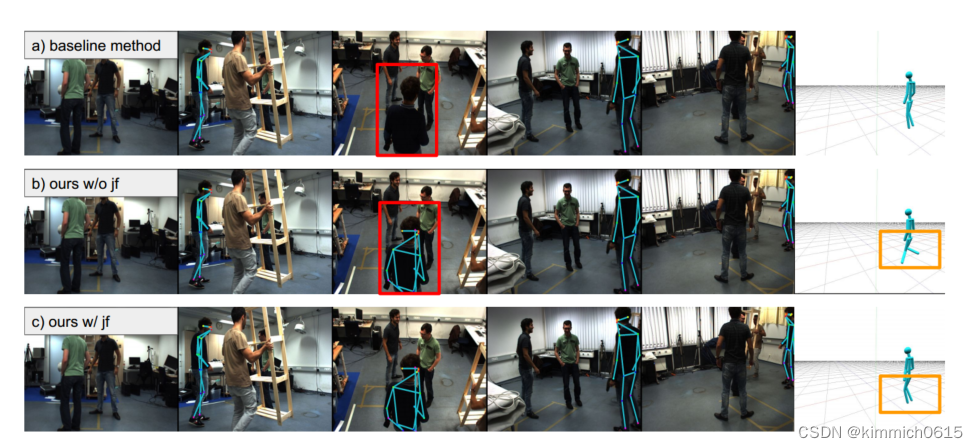
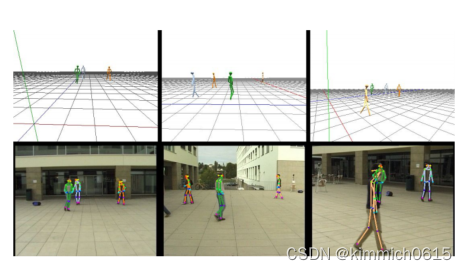
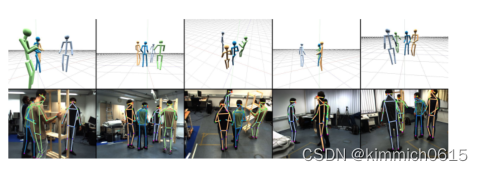
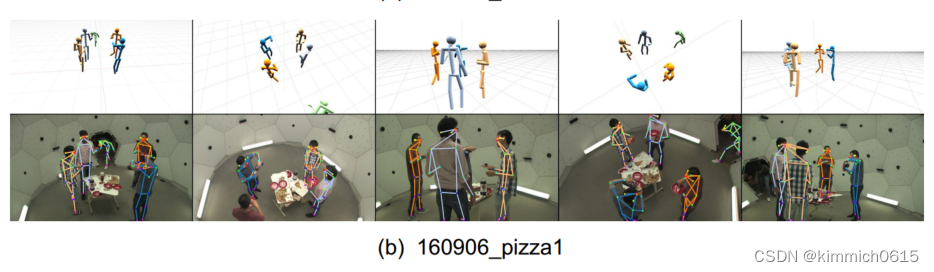
4.效果图















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









