






一、网络协议深入了解。练习wireshark抓取网络数据包。在两台的电脑(笔记本电脑win10 主机与ubuntu虚拟机。网卡选择桥接模式,可得到两个子网IPv4地址)上运行 “疯狂聊天室”程序,通过wireshark抓包:
一、建立自己的房间
双击crazychat.exe,创建聊天室
二、更改适配器设置
留下连接的网络,禁用其他网关。
控制面板->网络和Internet->网络和共享中心->更改适配器设置
三、成功发送消息
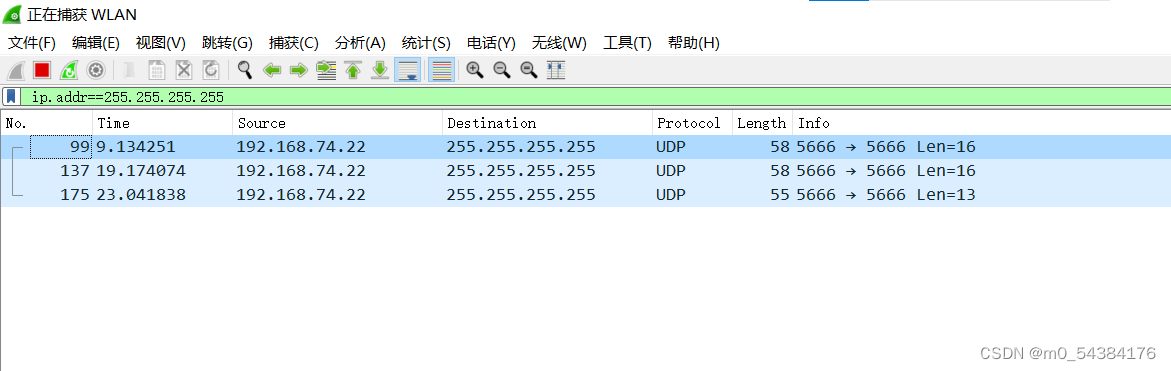
在wireshake中找到,可以看到 Ip address为广播地址255.255.255.255。
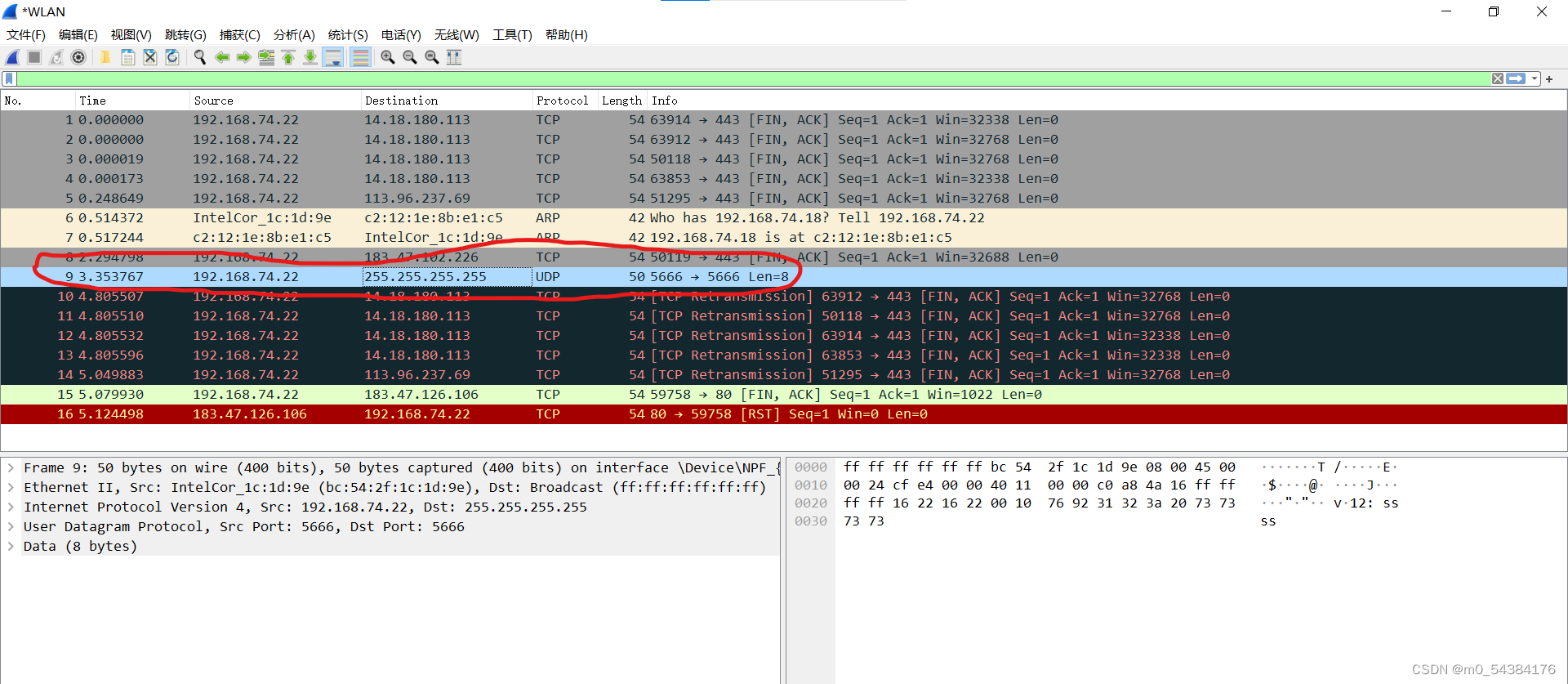
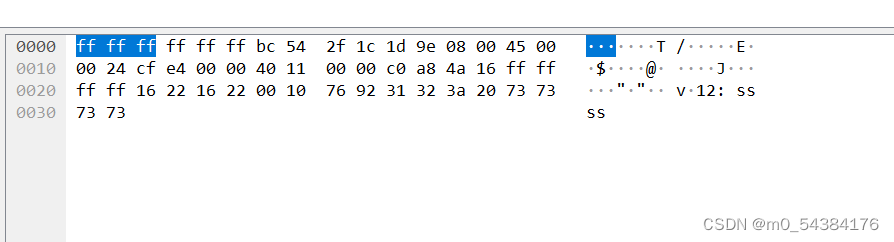
双击打开后可以看到端口号和发送的信息明文显示及字节编码。
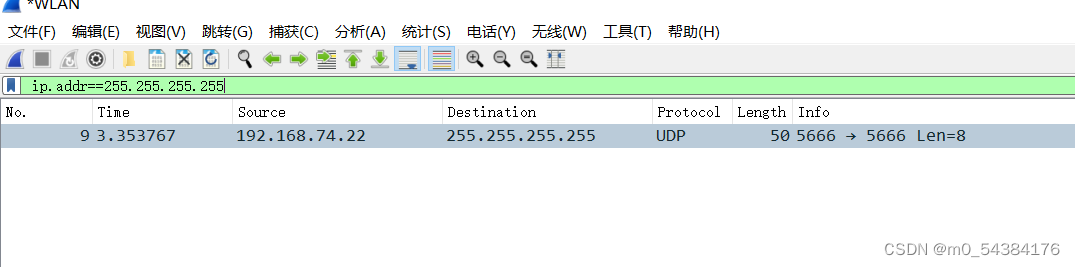
由上述实验操作可以得知是通过广播方式向其他电脑发送数据,就可以使用筛选器将目的地址设为255.255.255.255,在过滤器框内输入ip.addr==255.255.255.255即可筛选出来所有发送的信息。
可以看出数据包中的文字不是明文。
总结
由筛选出来的抓包文件可以看出,软件使用的协议是UDP。发送消息的方式是使用广播。
二、c语言完成modbus协议从云端服务器读取信息
新建一个TCP客户端项目
初始化socket dll,通过IP连接服务器对应端口
// 初始化socket dll。
WORD winsock_version = MAKEWORD(2,2);
WSADATA wsa_data;
if (WSAStartup(winsock_version, &wsa_data) != 0) {
printf("Failed to init socket!\n");
return 1;
}
SOCKET client_socket = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP);
if (client_socket == INVALID_SOCKET) {
printf("Failed to create server socket!\n");
return 2;
}
struct sockaddr_in server_addr;
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(PORT);
server_addr.sin_addr.S_un.S_addr = inet_addr(SERVER_IP);
if (connect(client_socket, (LPSOCKADDR)&server_addr, sizeof(server_addr)) == SOCKET_ERROR) {
printf("Failed to connect server: %ld !\n", GetLastError());
return 3;
}
输入指令格式
uint8_t data[length_8];
printf("具体指令给格式为0+传感器编号(1,2,3,4,5)0300010002");
printf("请输入采集传感器的指令):\r\n");
scanf("%s",data);
生成将输入指令转化为hex格式并生成crc16校验码
uint16_t crc;
unsigned char * cmd;
char crc1[8];
cmd = fromhex(data);
crc = CRC_16(cmd);
uint8_t a = 0xFF;
for(int i=0;i<6;i++){
//TODO
crc1[i] = cmd[i];
}
crc1[6] = a & crc;
crc1[7] = (crc >> 8) & a;
发送,接收数据并使用wireshark对发送数据进行抓包分析
if (send(client_socket, crc1, 8, 0) < 0) {
printf("Failed to send data!\n");
break;
}
int ret = recv(client_socket, recv_data, BUFFER_SIZE, 0);
if (ret < 0) {
printf("Failed to receive data!\n");
break;
}
recv_data[ret]=0; // correctly ends received string
char yb[4],wd[4];
for(int i=0;i<4;i++){
//TODO
yb[i] = recv_data[4+i];
wd[i] = recv_data[8+i];
}
float mic = hexToDec(yb)/100.0;
float strain_temp = hexToDec(wd)/100.0;
printf("应变:%f\r\n",mic);
printf("温度:%f\r\n",strain_temp);
// printf("Receive data from server: \"%x\"\n",recv_data);
if (strcmp(data,kExitFlag)==0) {
printf("Exit!\n");
break;
}
添加过滤信息(ip.dst ==123.56.90.74 and ip.src == 192.168.1.115) or (ip.dst ==192.168.1.115 and ip.src == 123.56.90.74) 只显示服务器发送回来的包以及发送过去的包
运行结果

三、用stm32最小核心板+AHT20模块,完成一modbus接口的温湿度Slave设备,能够让上位机PC通过modbus协议获取温湿度。主程序采用多任务框架,比如RT-thread Nano。
一、代码
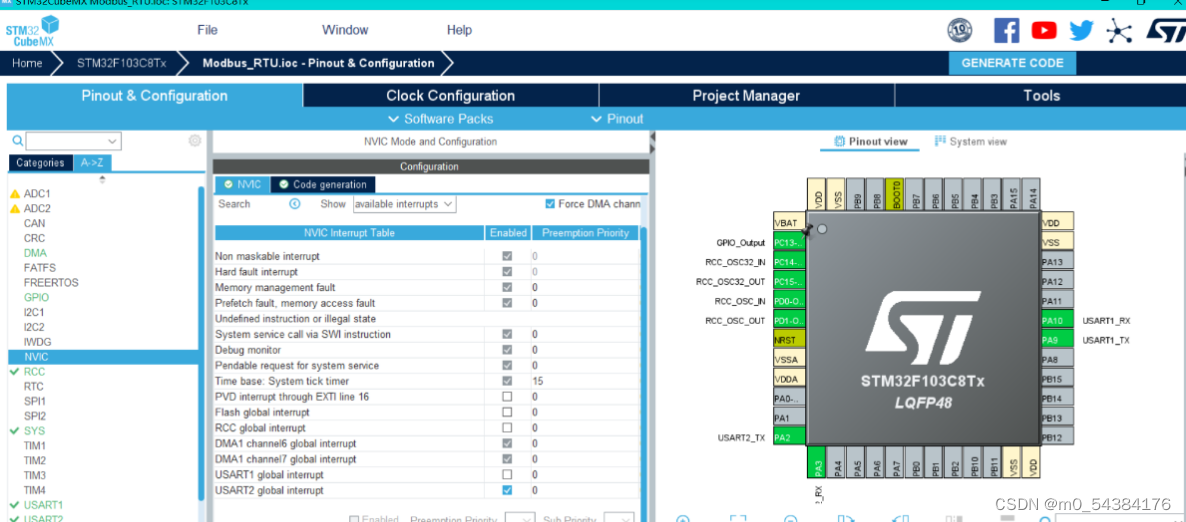
1.通过CubeMX配置stm32
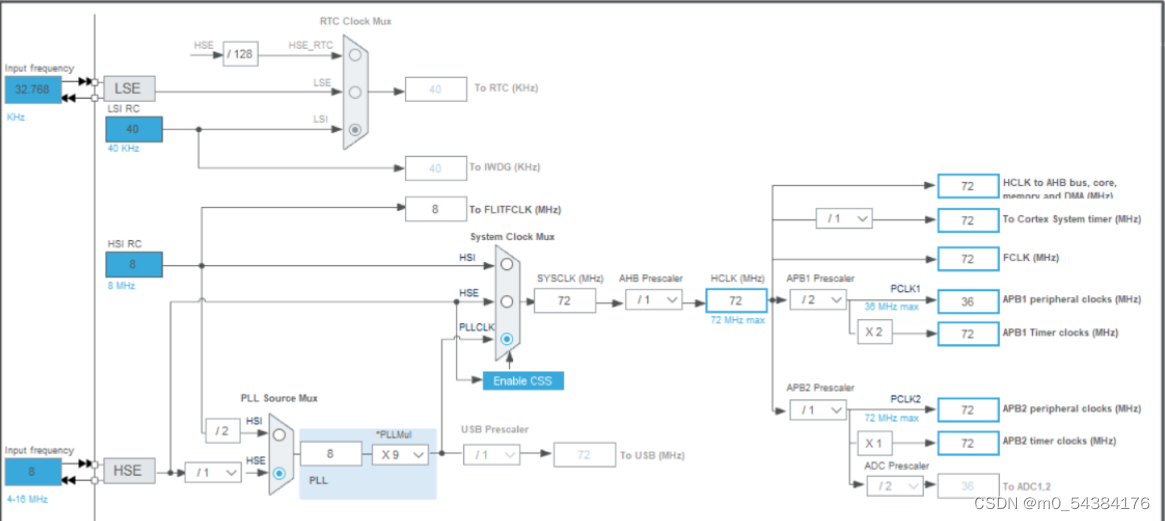
配置RCC

配置时钟
配置串口二波特率4800
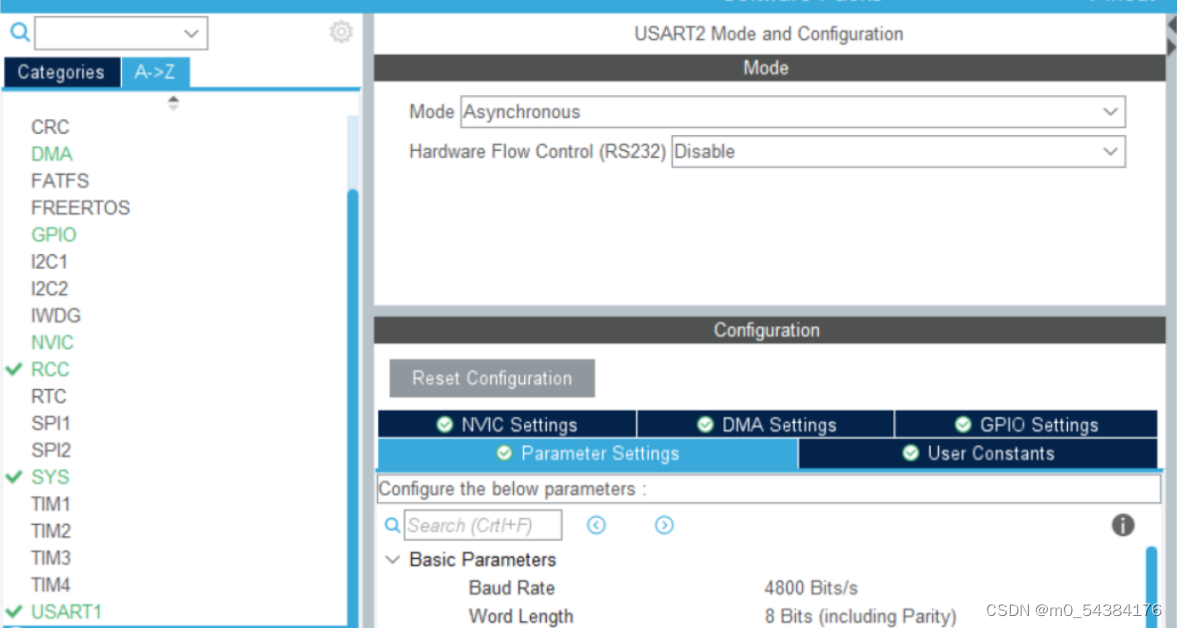
配置串口二DMA
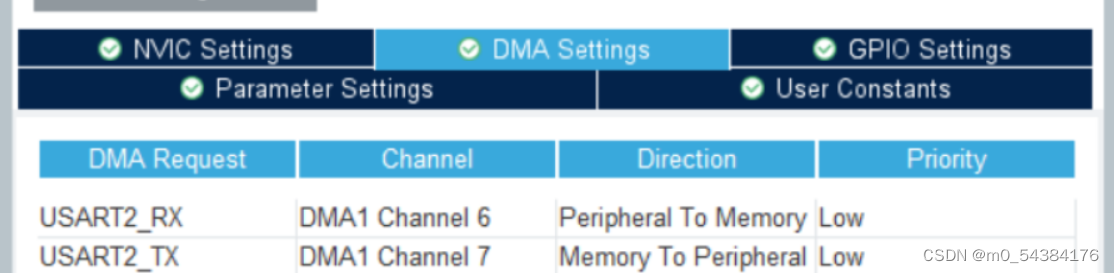
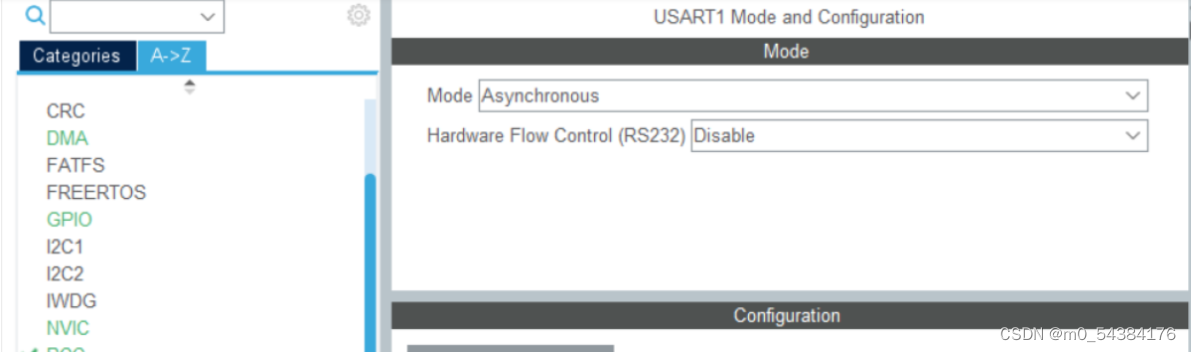
配置串口一
配置中断
2.主要代码
重定向输出串口一
usart.c
#include <stdio.h>
int fputc(int ch,FILE *f)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xFFFF);
//等待发送结束
while(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_TC)!=SET){
}
return ch;
}
添加中断处理
stm32f1xx_it.c的串口2中断处理函数
void USART2_IRQHandler(void)
{
/* USER CODE BEGIN USART2_IRQn 0 */
uint32_t tmp = 0;
tmp =__HAL_UART_GET_FLAG(&huart2,UART_FLAG_IDLE); //获取IDLE标志位
if((tmp != RESET))//idle标志被置位
{
//清除标志位
//__HAL_UART_CLEAR_IDLEFLAG(&huart2);
//清除状态寄存器SR,读取SR寄存器可以实现清除SR寄存器的功能
huart2.Instance->SR;
//读取数据寄存器中的数据
huart2.Instance->DR;
HAL_UART_DMAStop(&huart2); //
// 获取DMA中未传输的数据个数
dataLength=hdma_usart2_rx.Instance->CNDTR;
// 接受完成
isDataEnd = 1;
//清除标志位
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
}
/* USER CODE END USART2_IRQn 0 */
HAL_UART_IRQHandler(&huart2);
/* USER CODE BEGIN USART2_IRQn 1 */
/* USER CODE END USART2_IRQn 1 */
}
main.c
添加变量
extern DMA_HandleTypeDef hdma_usart2_rx;
//modbus问询帧
uint8_t commands[3][8]={
{0x01,0x03,0x00,0x00,0x00,0x02,0xC4,0x38},
{0x02,0x03,0x00,0x00,0x00,0x02,0xC4,0x38},
{0x03,0x03,0x00,0x00,0x00,0x02,0xC5,0xE9},
};
//modbus应答帧
uint8_t dataBuff[20];
//中断完成标志
uint8_t isDataEnd=0;
//应答帧长度
uint8_t dataLength;
//温度
uint16_t temperature;
//湿度
uint16_t humidity;
main函数
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_DMA_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
//使能idle中断
__HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE);
//打开串口DMA接收
HAL_UART_Receive_DMA(&huart2,dataBuff,sizeof(dataBuff));
//传感器地址
uint8_t i=0;
while (1)
{
//中断完成,解析应答帧
if(isDataEnd){
//提取湿度
humidity=(dataBuff[3] << 8) + (dataBuff[4]);
//提取温度
temperature=(dataBuff[5] << 8) + (dataBuff[6]);
//串口一发送解析结果
printf("温度: %.1f\t 湿度: %.1f\r\n",temperature/10.0,humidity/10.0);
memset(dataBuff,0,sizeof(dataBuff));//清空接收数组
isDataEnd=0;//清除接收结束标志位
}
//发送第 i 个传感器的 modbus 问询帧
HAL_UART_Transmit(&huart2,commands[i],sizeof(commands),0xFFFF);
//轮询读取三个传感器
i=(i+1)%3;
//打开串口DMA接收
HAL_UART_Receive_DMA(&huart2,dataBuff,sizeof(dataBuff));
//程序运行标志,闪灯
HAL_Delay(1000);
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_13);
}
效果
由于没有硬件,没法上板实验。
总结
这里只是简单的采用了静态指令进行访问数据,没有使用CRC校验。当采用动态指令的时候需要对编号进行自增以及对数据进行CRC校验,并且还需要对各种错误进行解析以及判断。














 3174
3174











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









