







目录
一:OpenCV图像特征采集
特征提取:
一幅图中总存在着一些独特的像素点,这些点我们可以认为就是这幅图的特征,成为特征点

计算机视觉领域特征提取:
获取一幅图中存在着一些独特的像素点。
需要解决问题:
1、提取图片中的特征点
2、解决尺度不变性问题,不同大小的图片获取到的特征是一样的
3、提取到的特征点要稳定,能被精确定位

二:OpenCV 特征提取算法
特征提取算法

三:OpenCV特征提取


结果:提取到的特征很粗糙,不是很精确的特征点,导致效果很差
要求:去粗取精,获取优秀的匹配点
四:OpenCV特征取精


取一幅图像中的一个SIFT关键点,并找出其与另一幅图像中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离得到的比率ratio少于某个阈值T,则接受这一对匹配点(优中选优)
五:OpenCV透视转换
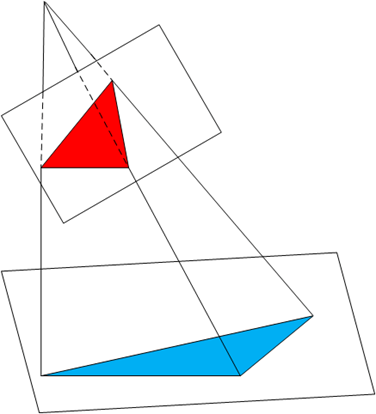

透视变换是按照物体成像投影规律进行变换,即将物体重新投影到新的成像平面
透视变换常用于机器人视觉导航研究中,由于相机视场与地面存在倾斜角使得物体成像产生畸变,通常通过透视变换实现对物体图像的校正
使用cv::warpPerspective()进行透视变换
void cv::warpPerspective(
cv::InputArray src, // 输入图像
cv::OutputArray dst, // 输出图像
cv::InputArray M, // 3x3 变换矩阵
cv::Size dsize, // 目标图像大小
int flags = cv::INTER_LINEAR, // 插值方法
int borderMode = cv::BORDER_CONSTANT, // 外推方法
const cv::Scalar& borderValue = cv::Scalar() //常量边界时使用
);
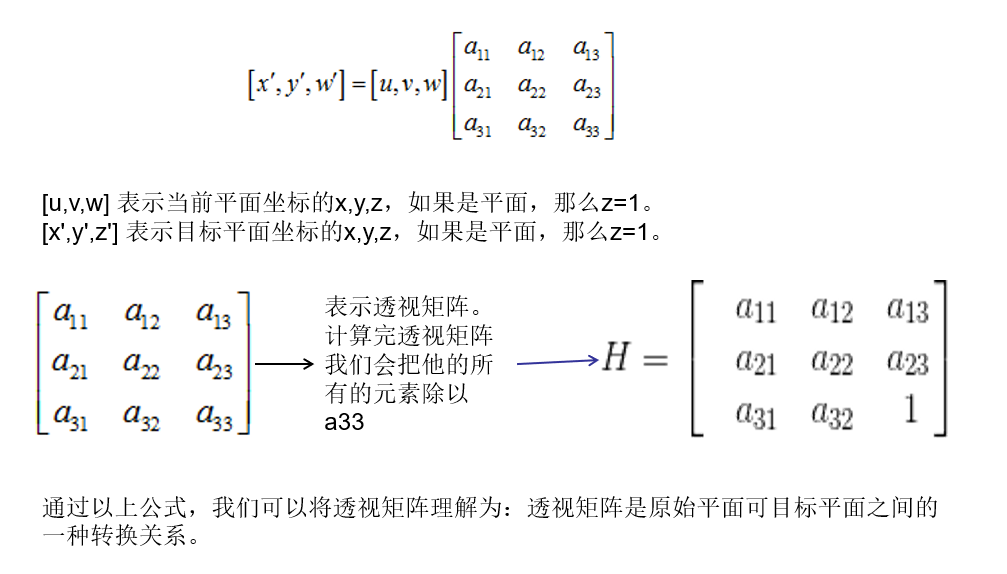
透视矩阵 :
获取特征矩阵:
a. 根据图像的4个顶点来获取特征矩阵
cv::Mat cv::getPerspectiveTransform( // 返回3x3透视变换矩阵
const cv::Point2f* src, // 源图像四个顶点坐标(点数组)
const cv::Point2f* dst // 目标图像上四个顶点的坐标(点数组)
);
b. 函数来计算透视矩阵H(3*3)
findHomography (
InputArray srcPoints,//源平面中点的坐标矩阵.vector<Point2f>类型
InputArray dstPoints,//目标平面中点的坐标矩阵,vector<Point2f>类型
int method = 0,
double ransacReprojThreshold = 3,
OutputArray mask = noArray(),
const int maxIters = 2000,
const double confidence = 0.995
)
六:OpenCV图像配准融合与图像反投影优化
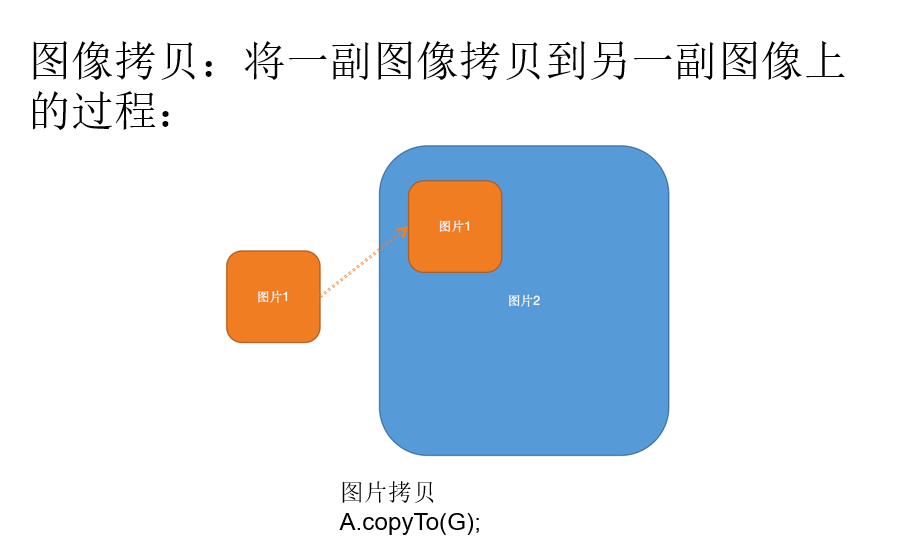
图片拼接流程思想


















 1034
1034











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











