







首先声明,作者为准大二学生,由于一些特殊原因被某研究生老师拉近了一个研究组,为了更好地记忆和复习,所以写了一下内容,如有错误,希望提出,直接骂我都可以。
现在开始正文,首先老样子,介绍一下粒子群算法的定义。
①定义(原理)
粒子群算法(PSO)是由Kennedy 和Eberhart等于1995 年开发的一种演化计算技术, 来源于Millonas 对一个简化社会模型的模拟。
其中“群( swarm )”来源于粒子群符合在开发应用于人工生命(artificiallife) 的模型时所提出的群体智能的5个基本原则。而“粒子(particle)”则是一个折衷的选择,因为既需要将群体中的成员描述为没有质量、没有体积的,同时也需要描述它的速度和加速状态。
由于PSO 算法概念简单,实现容易,短短几年时间,PSO 算法便获得了很大的发展,并在一些领域得到应用。
PSO 模拟鸟群的捕食行为。一群鸟在随机搜索食物,在这个区域里只有一块食物。所有的鸟都不知道食物在那里。但是他们知道当前的位置离食物还有多远。那么找到食物的最优策略是什么呢。最简单有效的就是搜寻目前离食物最近的鸟的周围区域。 PSO 从这种模型中得到启示并用于解决优化问题。
PSO 中,每个优化问题的解都是搜索空间中的一只鸟。我们称之为“粒子”。所有的粒子都有一个由被优化的函数决定的适应值(fitness value),每个粒子还有一个速度决定他们飞翔的方向和距离。然后粒子们就追随当前的最优粒子在解空间中搜索。 PSO 初始化为一群随机粒子(随机解),然后通过迭代找到最优解,在每一次迭代中,粒子通过跟踪两个“极值”来更新自己。第一个就是粒子本身所找到的最优解,这个解叫做个体极值 p Best,另一个极值是整个种群目前找到的最优解,这个极值是全局极值 g Best。另外也可以不用整个种群而只是用其中一部分最优粒子的邻
居,那么在所有邻居中的极值就是局部极值。
在每一次迭代过程中,粒子通过个体极值和群体极值更新自身的速度和位置,更新公式如下:
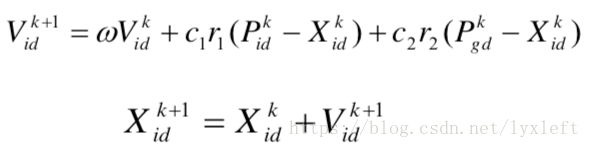
PSO 算法与其他演化算法相似, 也是基于群体的, 根据对环境的适应度将群体中的个体移动到好的区域,然而它不像其他演化算法那样对个体使用演化算子, 而是将每个个体看作n维搜索空间中的一个没有体积的微粒(点),在搜索空间中以一定的速度飞行。这个速度根据它本身的飞行经验以及同伴的飞行经验进行动态调整。
其中:
W:惯性权重
r1 r2:分布于[0,1]区间的随机数;
k:是当前迭代次数
pk id :个体最优例子位置
pk gd:全局最优粒子位置
c1,c2:常数
V:粒子速度
X:粒子位置
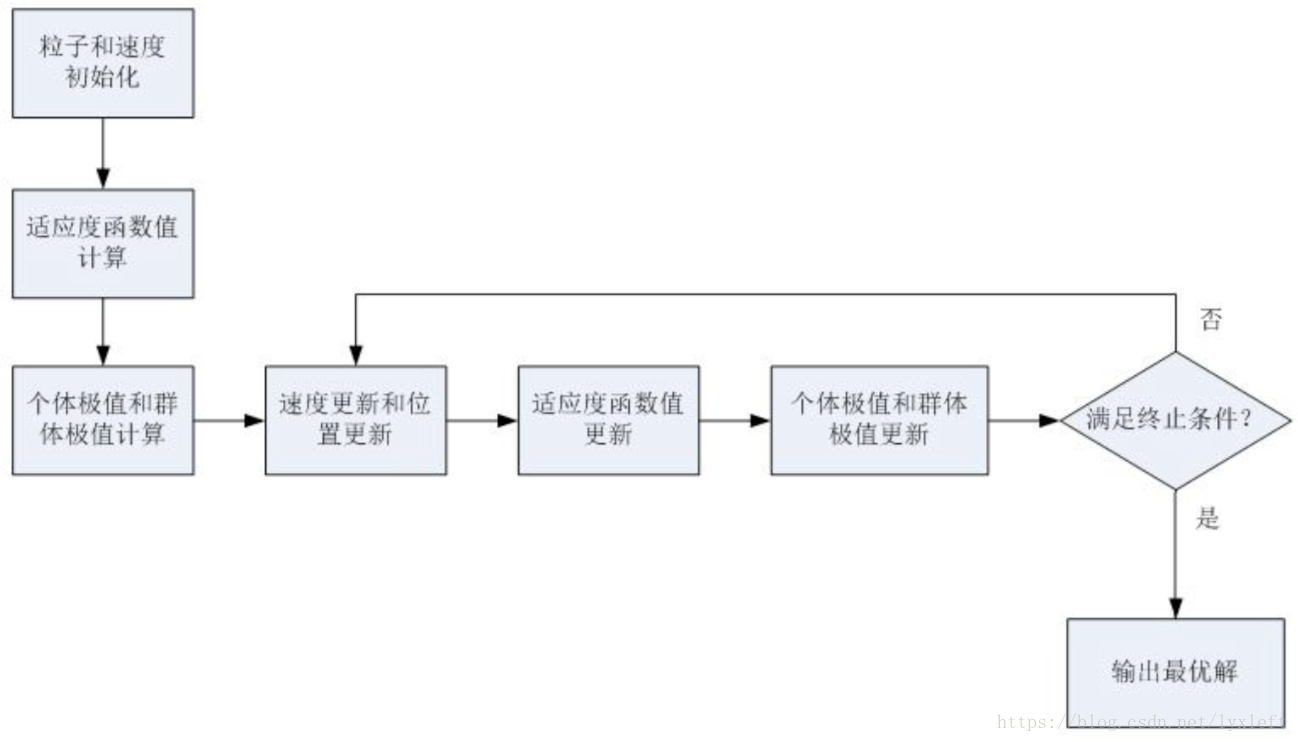
②算法步骤(过程)
发现了吗,PSO(粒子群算法)是不是有那么一点眼熟,是不是很像进化算法?他们都以随机的方式初始化了种群,都用适应值来评价了系统,都根据适应值来进行了一定的随机搜索,甚至都不能找到最优的解。
但差别还是很大的,PSO没有遗传操作(比如变异),它是依靠自己的运行速度来决定搜索。而且他不像遗传算法,粒子群算法是有记忆的。
在PSO中,只有的全局最优粒子位置(pBest)给出的信息给其他的例子,这是单向的信息流动。整个搜索更新过程是跟随当前最优解的过程。与进化算法比较,在大多数的情况下,所有的粒子可能更快的收敛于最优解。研究表明 PSO 是一种很有潜力的神经网络算法,同时 PSO 速度比较快而且可以得到比较好的结果。
但是!!,问题还是大大滴有,这类智能算法都不可避免的有陷入局部最优解的风险。
③PSO的MATLAB实现(以matlab为主)
基于粒子群算法的二维背包问题
首先还要先说一下多目标优化问题的原理,毕竟是写给自己看的,多写一点,忘了也
方便理解。要看代码的直接往下滑就好。
多目标问题显著特点是优化各个目标使其达到综合的最优值。然而,由于多目标优化问题的
各个目标之间往往是相互冲突的,在满足其中一个目标最优的同时,其他的目标往往可能
会受其影响变差。所以一般适用于单目标问题的方法难以用于多目标问题的求解。
多目标优化问题求解中的重要概念就是非劣解和非劣解集,
非劣解:在多目标优化问题的可行域中存在一个问题解,不存在另一个可行解,使得一个解中的目标全部劣于该解,则称该解为多目标优化问题的非劣解。说白了就是不是最差的那个解
非劣解集:所有非劣解的集合叫做非劣解集
下面就是运用标准粒子群算法求解多目标背包问题的步骤




main.m
%% 该函数演示多目标perota优化问题
%清空环境
clc
clear
%load data
P = [3 4 9 15 2;4 6 8 10 2.5;5 7 10 12 3;3 5 10 10 2]
R = [0.2 0.3 0.4 0.6 0.1;0.25 0.35 0.38 0.45 0.15;0.3 0.37 0.5 0.5 0.2;0.3 0.32 0.45 0.6 0.2]
C = [10 13 24 32 4;12 15 22 26 5.2;14 18 25 28 6.8;14 14 28 32 6.8]
%% 初始参数
objnum=size(P,1); %类中物品个数
weight=92; %总重量限制
%初始化程序
Dim=5; %粒子维数
xSize=50; %种群个数
%下面这五个参数是要自己设置的,为什么c1=c2=1.497,因为我之前在别人的一篇论文里见过说是取1.497的时候效果最好,最大速度通常设定为粒子的范围宽度。将c1和c2统一为一个控制参数φ=c1+c2。当φ=4.1时具有良好的收敛效果。
ω=0.7298和c1=c2=1.497时算法有较好的收敛性能。
MaxIt=200; %迭代次数
c1=1.497; %算法参数
c2=1.497; %算法参数
wmax=1.2; %惯性因子
wmin=0.1; %惯性因子
x=unidrnd(4,xSize,Dim); %粒子初始化
v=zeros(xSize,Dim); %速度初始化
xbest=x; %个体最佳值
gbest=x(1,:); %粒子群最佳位置
% 粒子适应度值
px=zeros(1,xSize); %粒子价值目标
rx=zeros(1,xSize); %粒子体积目标
cx=zeros(1,xSize); %重量约束
% 最优值初始化
pxbest=zeros(1,xSize); %粒子最优价值目标
rxbest=zeros(1,xSize); %粒子最优体积目标
cxbest=zeros(1,xSize); %记录重量,以求约束
% 上一次的值
pxPrior=zeros(1,xSize);%粒子价值目标
rxPrior=zeros(1,xSize);%粒子体积目标
cxPrior=zeros(1,xSize);%记录重量,以求约束
%计算初始目标向量
for i=1:xSize
for j=1:Dim %控制类别
px(i) = px(i)+P(x(i,j),j); %粒子价值
rx(i) = rx(i)+R(x(i,j),j); %粒子体积
cx(i) = cx(i)+C(x(i,j),j); %粒子重量
end
end
% 粒子最优位置
pxbest=px;rxbest=rx;cxbest=cx;
%% 初始筛选非劣解
flj=[];
fljx=[];
fljNum=0;
%两个实数相等精度
tol=1e-7;
for i=1:xSize
flag=0; %支配标志
for j=1:xSize
if j~=i
if ((px(i)<px(j)) && (rx(i)>rx(j))) ||((abs(px(i)-px(j))<tol)...
&& (rx(i)>rx(j)))||((px(i)<px(j)) && (abs(rx(i)-rx(j))<tol)) || (cx(i)>weight) %哦按段支配关系
flag=1;
break;
end
end
end
%判断有无被支配/是否被支配构建新结集
if flag==0
fljNum=fljNum+1;
% 记录非劣解
flj(fljNum,1)=px(i);flj(fljNum,2)=rx(i);flj(fljNum,3)=cx(i);
% 非劣解位置
fljx(fljNum,:)=x(i,:);
end
end
%% 循环迭代
for iter=1:MaxIt
% 权值更新
w=wmax-(wmax-wmin)*iter/MaxIt;
%从非劣解中选择粒子作为全局最优解
s=size(fljx,1);
index=randi(s,1,1);
gbest=fljx(index,:);
%% 群体更新
for i=1:xSize
%速度更新
v(i,:)=w*v(i,:)+c1*rand(1,1)*(xbest(i,:)-x(i,:))+c2*rand(1,1)*(gbest-x(i,:));
%位置更新
x(i,:)=x(i,:)+v(i,:);
x(i,:) = rem(x(i,:),objnum)/double(objnum);
index1=find(x(i,:)<=0);
if ~isempty(index1)
x(i,index1)=rand(size(index1));
end
x(i,:)=ceil(4*x(i,:));
end
%% 计算个体适应度
pxPrior(:)=0;
rxPrior(:)=0;
cxPrior(:)=0;
for i=1:xSize
for j=1:Dim %控制类别
pxPrior(i) = pxPrior(i)+P(x(i,j),j); %计算粒子i 价值
rxPrior(i) = rxPrior(i)+R(x(i,j),j); %计算粒子i 体积
cxPrior(i) = cxPrior(i)+C(x(i,j),j); %计算粒子i 重量
end
end
%% 更新粒子历史最佳
for i=1:xSize
%现在的支配原有的,替代原有的
if ((px(i)<pxPrior(i)) && (rx(i)>rxPrior(i))) ||((abs(px(i)-pxPrior(i))<tol)...
&& (rx(i)>rxPrior(i)))||((px(i)<pxPrior(i)) && (abs(rx(i)-rxPrior(i))<tol)) || (cx(i)>weight)
xbest(i,:)=x(i,:);%没有记录目标值
pxbest(i)=pxPrior(i);rxbest(i)=rxPrior(i);cxbest(i)=cxPrior(i);
end
%彼此不受支配,随机决定
if ~( ((px(i)<pxPrior(i)) && (rx(i)>rxPrior(i))) ||((abs(px(i)-pxPrior(i))<tol)...
&& (rx(i)>rxPrior(i)))||((px(i)<pxPrior(i)) && (abs(rx(i)-rxPrior(i))<tol)) || (cx(i)>weight) )...
&& ~( ((pxPrior(i)<px(i)) && (rxPrior(i)>rx(i))) ||((abs(pxPrior(i)-px(i))<tol) && (rxPrior(i)>rx(i)))...
||((pxPrior(i)<px(i)) && (abs(rxPrior(i)-rx(i))<tol)) || (cxPrior(i)>weight) )
if rand(1,1)<0.5
xbest(i,:)=x(i,:);
pxbest(i)=pxPrior(i);rxbest(i)=rxPrior(i);cxbest(i)=cxPrior(i);
end
end
end
%% 更新非劣解集合
px=pxPrior;
rx=rxPrior;
cx=cxPrior;
%更新升级非劣解集合
s=size(flj,1);%目前非劣解集合中元素个数
%先将非劣解集合和xbest合并
pppx=zeros(1,s+xSize);
rrrx=zeros(1,s+xSize);
cccx=zeros(1,s+xSize);
pppx(1:xSize)=pxbest;pppx(xSize+1:end)=flj(:,1)';
rrrx(1:xSize)=rxbest;rrrx(xSize+1:end)=flj(:,2)';
cccx(1:xSize)=cxbest;cccx(xSize+1:end)=flj(:,3)';
xxbest=zeros(s+xSize,Dim);
xxbest(1:xSize,:)=xbest;
xxbest(xSize+1:end,:)=fljx;
%筛选非劣解
flj=[];
fljx=[];
k=0;
tol=1e-7;
for i=1:xSize+s
flag=0;%没有被支配
%判断该点是否非劣
for j=1:xSize+s
if j~=i
if ((pppx(i)<pppx(j)) && (rrrx(i)>rrrx(j))) ||((abs(pppx(i)-pppx(j))<tol) ...
&& (rrrx(i)>rrrx(j)))||((pppx(i)<pppx(j)) && (abs(rrrx(i)-rrrx(j))<tol)) ...
|| (cccx(i)>weight) %有一次被支配
flag=1;
break;
end
end
end
%判断有无被支配
if flag==0
k=k+1;
flj(k,1)=pppx(i);flj(k,2)=rrrx(i);flj(k,3)=cccx(i);%记录非劣解
fljx(k,:)=xxbest(i,:);%非劣解位置
end
end
%去掉重复粒子
repflag=0; %重复标志
k=1; %不同非劣解粒子数
flj2=[]; %存储不同非劣解
fljx2=[]; %存储不同非劣解粒子位置
flj2(k,:)=flj(1,:);
fljx2(k,:)=fljx(1,:);
for j=2:size(flj,1)
repflag=0; %重复标志
for i=1:size(flj2,1)
result=(fljx(j,:)==fljx2(i,:));
if length(find(result==1))==Dim
repflag=1;%有重复
end
end
%粒子不同,存储
if repflag==0
k=k+1;
flj2(k,:)=flj(j,:);
fljx2(k,:)=fljx(j,:);
end
end
%非劣解更新
flj=flj2;
fljx=fljx2;
end
%绘制非劣解分布
plot(flj(:,1),flj(:,2),'o')
xlabel('P')
ylabel('R')
title('最终非劣解在目标空间分布')
disp('非劣解flj中三列依次为P,R,C')结果:

图一

图二
这边我要解释一下,用我自己的语言,我一开是学这个的时候纠结这个图特别久,老师配套的视频讲的又很不明白,一言难尽。
有五类问题,每类选择一个放入背包,得到整体的解,因为解有很多,所以没有在图片中将
所有表示搞出来,由图二可以看出解面是一个解线,我们在求多目标的时候得到的不是单个最优解
而是得到一个解的集合(曲线),这里有个概念就是支配解,上面提过了这个,可以回去看。
另外图二的看法其实很简单,就是每一个点代表一个总的价值:体积,重量没有在图中显示出来,当然也可以显示,不过没有必要,不难看出最终越来越逼近最优解了。
下一篇博客我会写一下如何改进这个二维背包问题
















 260
260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











