







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
无人机技术的快速发展在各个领域都产生了巨大的影响。从军事应用到民用领域,无人机的应用范围越来越广泛。为了确保无人机的安全性和可靠性,在无人机的研发和测试过程中,使用模拟器进行仿真是至关重要的。本文将探讨六自由度无人机模拟器的设计。
六自由度无人机模拟器是一种能够模拟无人机在六个自由度上的运动的软件或硬件系统。这六个自由度包括三个线性自由度(沿X、Y和Z轴的平移运动)和三个旋转自由度(围绕X、Y和Z轴的旋转运动)。通过模拟这些自由度,可以准确地模拟无人机在真实环境中的飞行行为。
在设计六自由度无人机模拟器时,需要考虑以下几个关键因素:
-
动力学模型:模拟器必须能够准确地模拟无人机的动力学特性。这包括飞行器的质量、惯性矩阵、推力和扭矩等参数。通过使用适当的动力学模型,可以实现真实飞行行为的仿真。
-
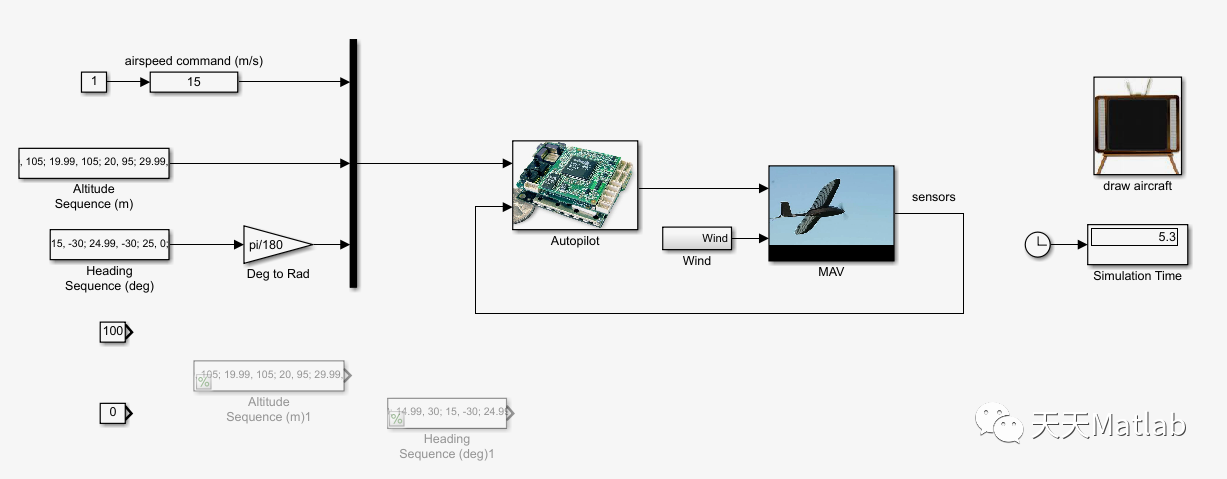
控制系统:无人机的控制系统对于实现稳定的飞行至关重要。模拟器必须能够模拟无人机的控制系统,包括姿态控制、高度控制和航向控制等。通过模拟这些控制系统,可以评估无人机在不同飞行条件下的性能。
-
环境模型:无人机在不同环境条件下的飞行行为可能会有所不同。因此,模拟器必须能够模拟不同的环境条件,包括风力、气压和温度等。通过在不同环境条件下进行仿真,可以评估无人机在各种情况下的适应性和稳定性。
-
传感器模型:无人机通常配备了各种传感器,如加速度计、陀螺仪和GPS等。模拟器必须能够模拟这些传感器的输出,以便评估无人机在真实环境中的感知和导航能力。
-
用户界面:模拟器应该具有直观的用户界面,以便用户能够轻松地控制无人机和监控仿真过程。用户界面应该提供实时的飞行数据和图形化的显示,以便用户能够准确地评估无人机的性能。
设计一个高质量的六自由度无人机模拟器是一项复杂的任务。它需要深入理解无人机的动力学特性和控制系统,并将其转化为可执行的仿真模型。此外,模拟器还需要考虑到各种环境条件和传感器输出,以便提供准确的仿真结果。
六自由度无人机模拟器在无人机研发和测试过程中发挥着重要的作用。它可以帮助研发人员评估无人机的性能、优化控制算法,并提供训练平台供飞行员进行飞行操作的实践。通过使用模拟器进行仿真,可以减少无人机研发和测试过程中的风险和成本,并提高无人机的安全性和可靠性。
总之,六自由度无人机模拟器的设计是无人机研发和测试过程中不可或缺的一部分。它可以提供准确的飞行行为仿真,并帮助研发人员评估无人机的性能和优化控制算法。通过使用模拟器,可以提高无人机的安全性和可靠性,推动无人机技术的进一步发展。
📣 部分代码
% Jeffrey Paine% ME621 Project Part 6% TF Coeffs[num, den] = tfdata(T_phi_delta_a, 'v');a_phi2 = num(3);a_phi1 = den(2);[num, den] = tfdata(T_theta_delta_e, 'v');a_theta1 = den(2);a_theta2 = den(3);a_theta3 = num(3);[num, den] = tfdata(T_Va_delta_t, 'v');a_V1 = den(2);a_V2 = num(2);[num, den] = tfdata(T_Va_theta, 'v');a_V3 = -num(2);%% Roll Loop Gains% Inputdelta_a_max = 30;e_phi_max = 15;% Tuning Parameterszeta_phi = 1.5;ki_phi = 0.1;% Natural Frequencyw_n_phi = sqrt( (delta_a_max / e_phi_max)*abs(a_phi2) );% Gainskp_phi = (delta_a_max / e_phi_max)*sign(a_phi2);kd_phi = (2*zeta_phi*w_n_phi - a_phi1) / a_phi2;%% Course Loop Gains% Input% Tuning Parameterszeta_chi = .9;W_chi = 15;% Natural Frequencyw_n_chi = w_n_phi / W_chi;% GainsVg = P.Va0;kp_chi = (2*zeta_chi*w_n_chi*Vg) / P.gravity;ki_chi = (w_n_chi^2)*Vg / P.gravity;kd_chi = 0;%% Sideslip Loop Gains%% Pitch Loop Gains% Inputdelta_e_max = 45 *pi/180;e_theta_max = 10 *pi/180;% Tuning Parameterszeta_theta = .9;% Natural Frequencyw_n_theta = sqrt( ((delta_e_max/e_theta_max)*abs(a_theta3)) + a_theta2);% Gainskp_theta = (delta_e_max/e_theta_max)*sign(a_theta3);kd_theta = -(2*zeta_theta*w_n_theta - a_theta1) / a_theta3;%% Altitude from Pitch Loop Gains% InputK_theta_DC = (kp_theta*a_theta3) / (a_theta2 + kp_theta*a_theta3);% Tuning Parameterszeta_h = 0.7;W_h = 18;% Natural Frequencyw_n_h = (1/W_h) * w_n_theta;% Gainski_h = (w_n_h^2) / (K_theta_DC*Vg);kp_h = (2*zeta_h*w_n_h) / (K_theta_DC*Vg);%% Airspeed from Pitch Loop Gains% Input% Tuning Parameterszeta_V2 = .9;W_V2 = 15;% Natural Frequencyw_n_V2 = (1/W_V2) * w_n_theta;% Gainski_V2 = -(w_n_V2^2) / (K_theta_DC*P.gravity);kp_V2 = (a_V1 - 2*zeta_V2*w_n_V2) / (K_theta_DC*P.gravity);%% Airspeed from Throttle Loop Gains% Input% Tuning Parameterszeta_V = 1;W_V = 4;% Natural Frequencyw_n_V = (1/W_V) * w_n_V2;% Gainski_V = (w_n_V^2) / a_V2;kp_V = (2*zeta_V*w_n_V - a_V1) / a_V2;%% Set VariableP.kp_phi = kp_phi;P.kd_phi = kd_phi;P.ki_phi = ki_phi;P.kp_chi = kp_chi;P.ki_chi = ki_chi;P.kd_chi = kd_chi;P.kp_theta = kp_theta;P.kd_theta = kd_theta;P.ki_h = ki_h;P.kp_h = kp_h;P.ki_V2 = ki_V2;P.kp_V2 = kp_V2;P.ki_V = ki_V;P.kp_V = kp_V;
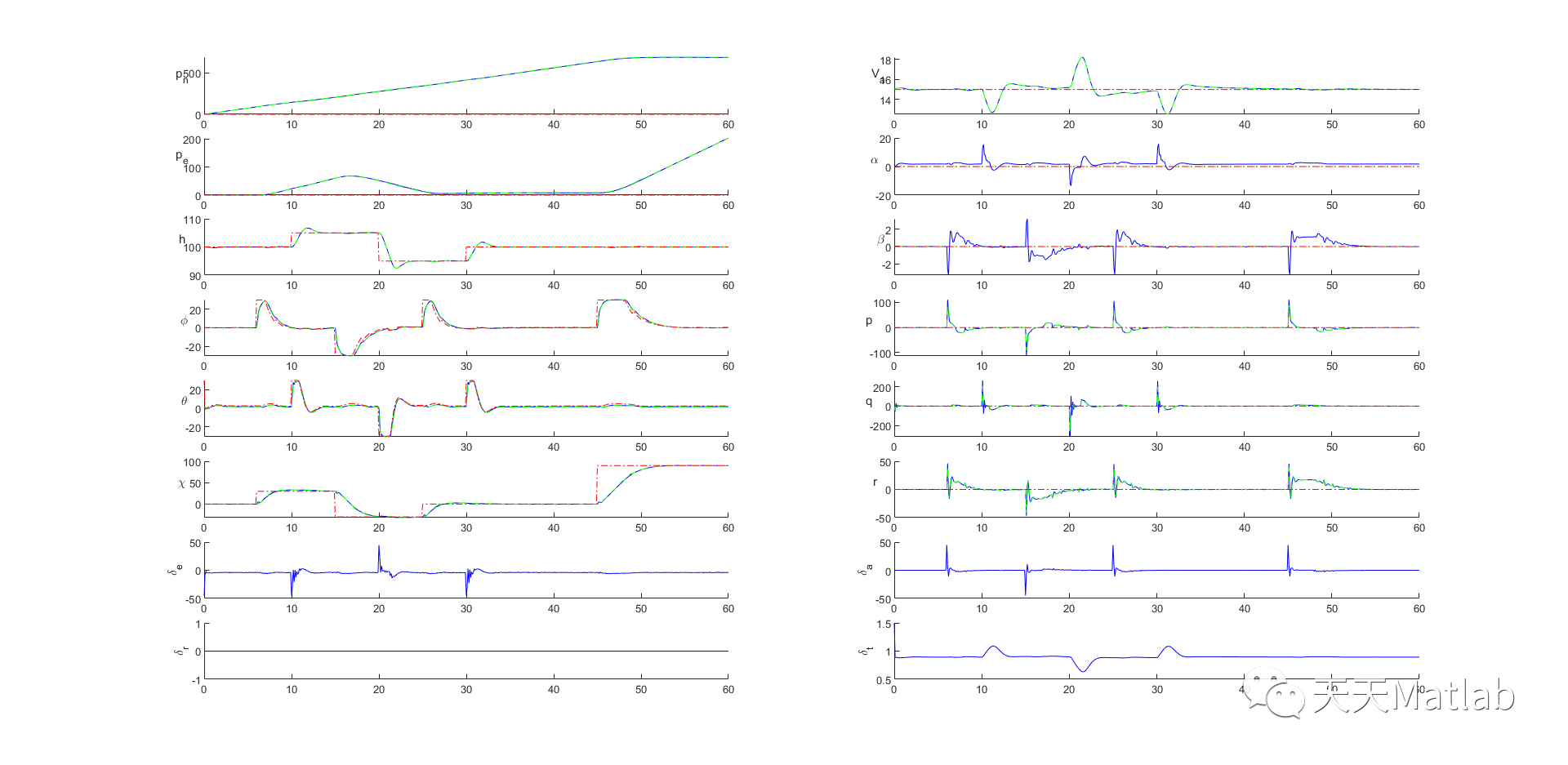
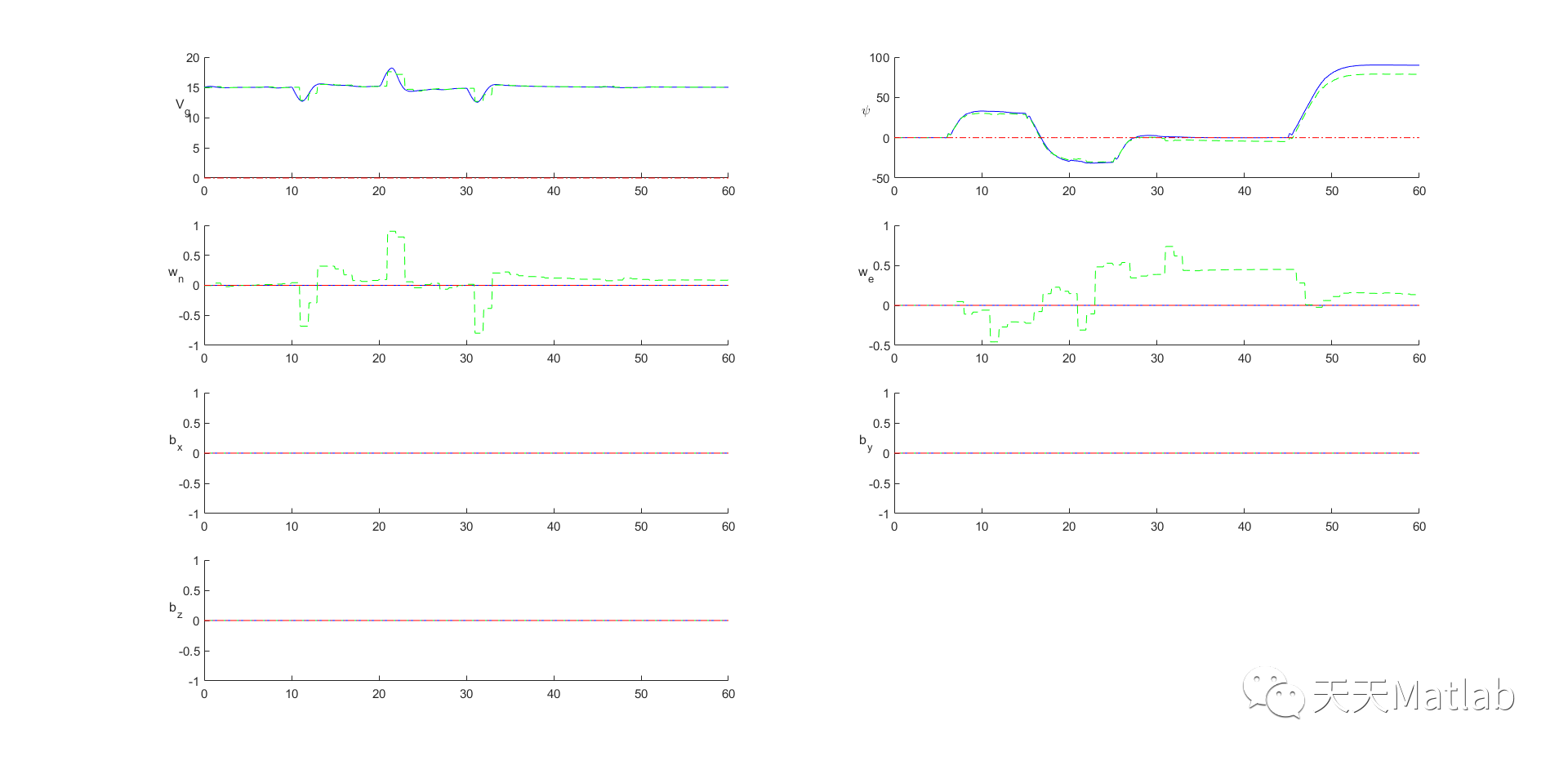
⛳️ 运行结果
🔗 参考文献
[1] 何湘智,王荣春,周伟.基于MATLAB的无人机六自由度仿真与研究[J].机械工程与自动化, 2010(4):3.DOI:10.3969/j.issn.1672-6413.2010.04.011.
[2] 高胜灵,胡松启.基于Matlab/Simulink的导弹六自由度弹道仿真系统设计[J].科学技术与工程, 2011, 11(1):6.DOI:10.3969/j.issn.1671-1815.2011.01.008.















 655
655











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









