







1.模型提出
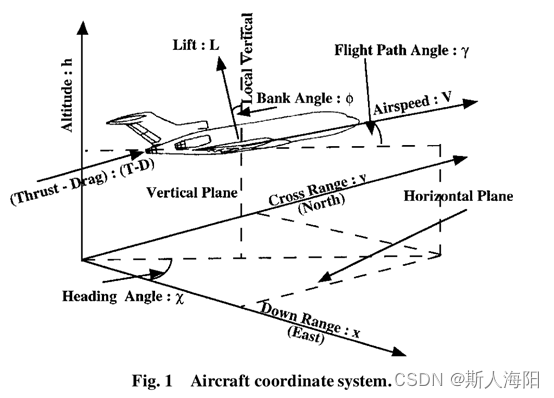
动力学方程如下:
![]()
![]()
![]()
![]()
![]()
![]()
其中每个字母含义如下:
![]()
![]() ,
,![]() .
.
![]()
![]()
![]()
![]()
![]()
为方便分析,描述飞机位置的运动学方程可以对时间微分一次,它们之间的关系式如下:
![]()
![]()
航向角![]() 和航迹角
和航迹角![]() 计算方法如下:
计算方法如下:
![]()
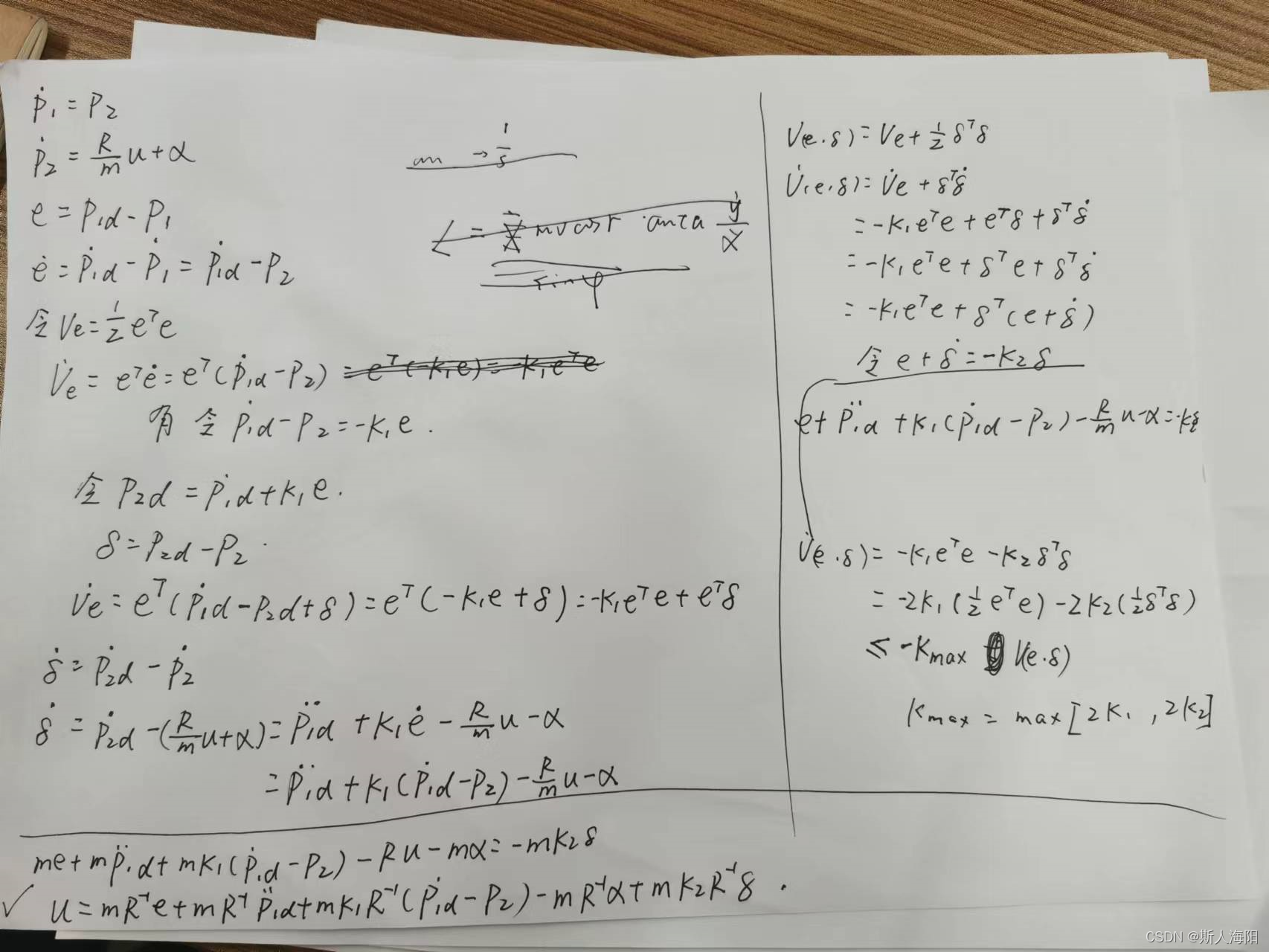
2.利用backsteping方法设计控制器
令 ![]() , 则模型可以写成:
, 则模型可以写成:
![]()
![]()
其中![]()
![]()
公式敲起来麻烦,证明过程如下图所示:
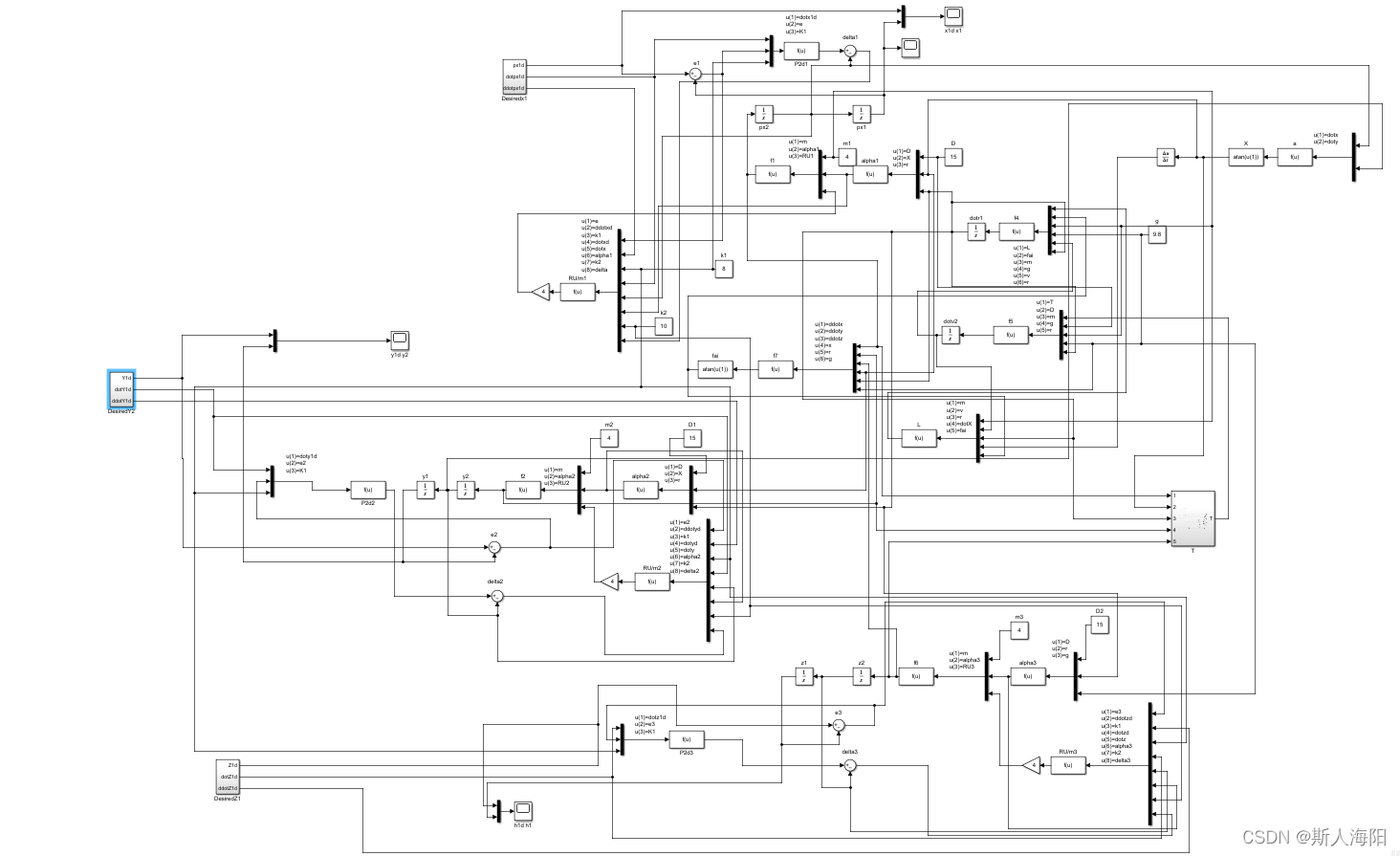
3.siumlink仿真
总体仿真图如下:
期望轨迹:
x = 0.5*sin(0.5*t+0.5);
y = 0.5*sin(0.5*t);
z = 0.1*t+9;
初始条件x,y,z=(0,0,0),m=4kg,D=15N,g=9.81,k1=8,k2=10
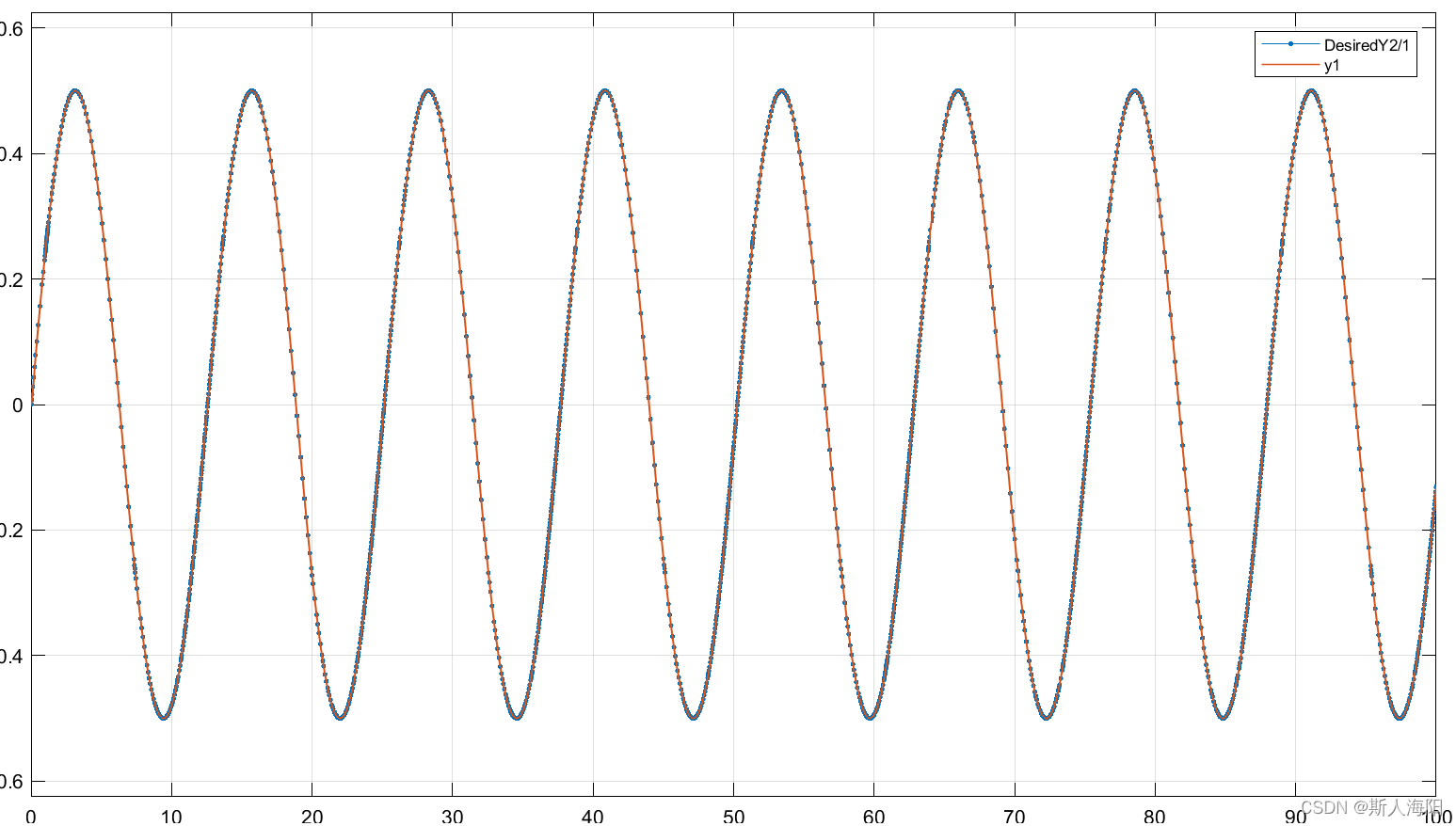
仿真结果:
x轴方向期望轨迹和实际轨迹

y轴
z轴

利用matlab画三维图形:
t=out.ScopeDatax(:,1);
xd=out.ScopeDatax(:,2);
x=out.ScopeDatax(:,3);
yd=out.ScopeDatay(:,2);
y=out.ScopeDatay(:,3);
zd=out.ScopeDataz(:,2);
z=out.ScopeDataz(:,3);
plot3(xd,yd,zd,'b-',x,y,z,'r:')
legend('期望_1', '实际_2')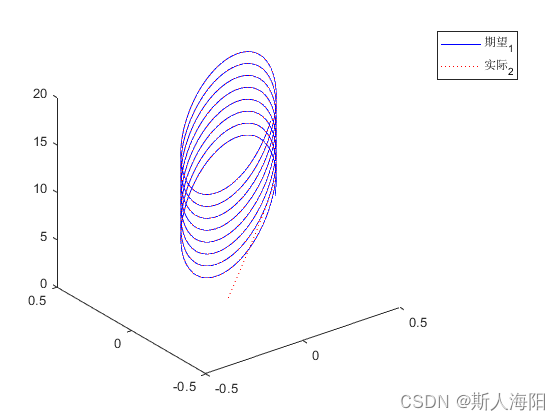
4.参考文献
Menon, P .K., Sweriduk, G.D., Sridhar, B.: Optimal strategies for free-flight air traffic conflict resolution. J. Guidance Control Dyn.22(2), 202–211 (1999)
Menon, P . K., “ Short-Range Nonlinear Feedback Strategies for Aircraft Pursuit –Evasion,” Journal of Guidance, Control, and Dynamics , Vol.12, No. 1, 1989, pp. 27 –32.

















 245
245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









