






void AD_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1) != SET);//舍去校验程序能正常进行,而校验时程序卡死
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) != SET);
}
uint16_t AD_GetValue(void)
{
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5);
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}以上是AD初始化函数的配置,以及和获取AD数值函数
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}以上是串口传送与接受函数的配置,和传送函数,接受函数我在此没有展示
在没有添加,AD模块时,传送函数能正常运行,而当我添加AD模块后,并在初始化函数后,运行传送函数,启动仿真时,虚拟终端并没有显示,'1'该字符,随后我对仿真进行检查,发现PA8与PA9端口是有状态显示的,说明我的串口初始化函数没有问题
Serial_Init();
AD_Init();
Serial_SendByte('1');随后我将传送函数进行位置调整,再进行仿真,此时虚拟终端有数值显示'1'
Serial_Init();
Serial_SendByte('1');
AD_Init();
这个时候我已经可以肯定问题出在AD初始化函数中,接下来我在AD初始化函数中不断进行, Serial_SendByte('1');的位置调整
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//Serial_SendByte('1'); 第一个位置
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Serial_SendByte('1');第二个位置
ADC_InitTypeDef ADC_InitStructure;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
//Serial_SendByte('1');第三个位置
ADC_Cmd(ADC1, ENABLE);
//Serial_SendByte('1');第四个位置
ADC_ResetCalibration(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1) == SET);//舍去校验程序能正常进行,而校验时程序卡死
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET);while (ADC_GetResetCalibrationStatus(ADC1) == SET);
while (ADC_GetCalibrationStatus(ADC1) == SET);
最终发现程序是在这俩步,校验卡死,修改GPIO结构体名称,ADC_Cmd使能函数后加延迟,给ADC结构体初始化,启动校准时,ANEO为也置1了俩个周期以上,方法全不行,我尝试转到定义,查看ADC1_CR2寄存器的变化,在校验那四步函数应变化的值都是正确的,唯一出错地方就是硬件不能清0
我也想过能不能直接省去这俩步校验,或者仅校验一次
但是经过我提高校验次数后,每一次的数据都不相同,再根据网上资料查阅,发现这个校准卡死问题还是得解决
ADC 校准的目的是为了消除 ADC 的偏移误差和增益误差,从而提高测量精度。
作者被这个问题干扰了俩天,差一点想把电脑炸了,最后发现一个很玄学的现象。
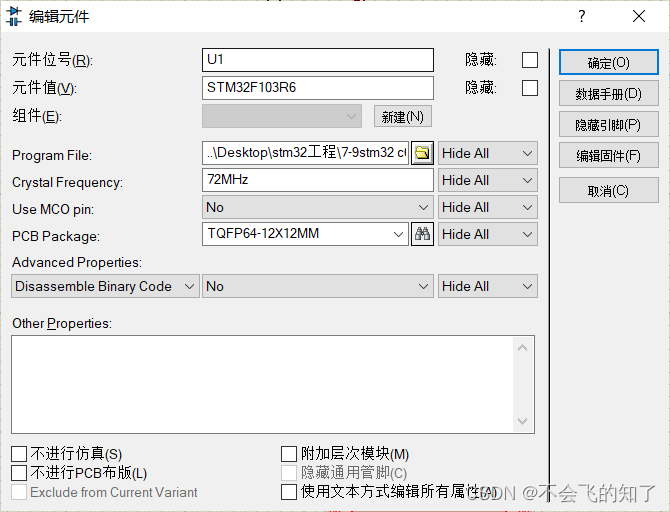
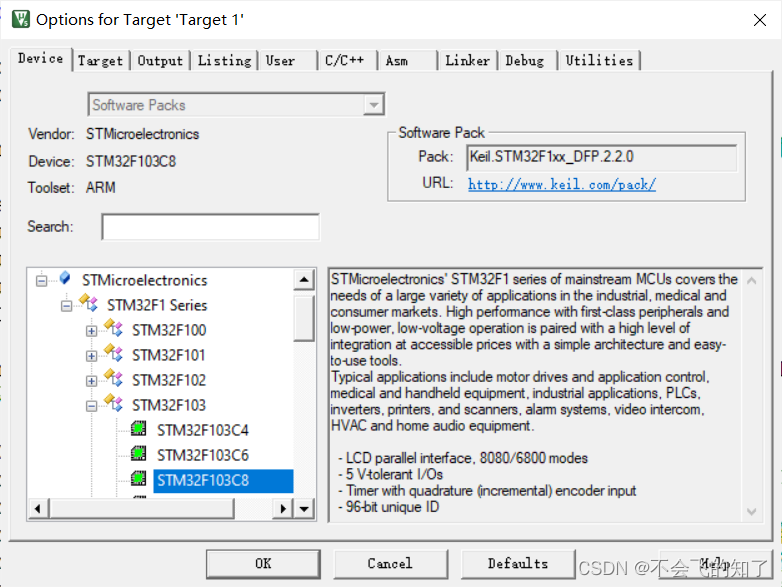
后来我用网上的例子,就b站那个stm32教学的例程,有个AD单通,我点进去用它仿真,您猜怎么着?它是可以正常运行的,而我复制他的代码,进行一些删改,自然也是没问题,我再拿去我的工程中仿真,您猜怎么着,mad不行!后续我点开魔法棒,一个个看参数,您猜怎么着?mad例程用的是STM32F103C8,跟我仿真的芯片不一样,但是它可以运行,而我用的R6后面我把编程芯片改C8,然后就行了。别问我为什么一开始不用C8,我proteus版本是8.9没有C8的, 建议大家用8.13以上的版本,芯片选择C8的。
还准备说去看看HAL库会不会有这种问题,现在不用了,嵌入式开发路长道远,诸君共勉。















 8747
8747











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









