






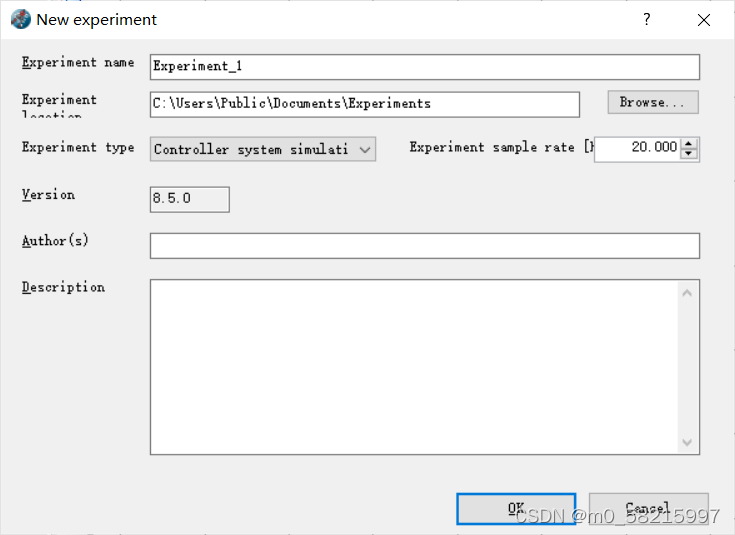
一、 prescan新建场景(Experiment,快捷键Ctrl+N)
可设定保存路径,给仿真预设特定的计算频率,作者名称以及简单的场景模型描述
二、场景建模工作
鼠标滚轮可实现画布的缩放,摁住滚轮可实现平移画布
搭建场景主要采用拖放的方式,左侧的场景元素库中选择
编辑模型: 2.1.双击进入编辑状态
2.2.选中模型,右侧可编辑模型属性
2.3.右击Object configuration(车道线以及路面的材质)
三、静态部分模型搭建
3.1先将周围环境搭建好,拖入车辆设定轨迹,将车辆拖至预定路线
3.2build编译,即在view中生成3D可视化
3.3生成文件 .pex文件是GUI可加载的场景文件 -cs.slx是Simulink集成调试文件 .pb文件是每次build之后将模型全部更新在.pb文件中,即模型文件。在Simulink时是从.pb文件中提取更新。
四、获取感知信息
4.1传感器:最理想的传感器AIR 使传感器感测范围可知1:Experiment—General settings—3Dworld 2传感器本身——右侧属性栏的Visualize 3. Simulation Scheduler——Visualize in Visviewer 之后build
五、获取数据:
5.1打开Simulink模型(Regenerate更新)——接入端口,设定仿真时间——运行仿真
5.2Simulink 快捷操作:
1添加模块,将需要的模块拖入
2、在空白处单击,输入所需模块的名称
5.3 模块操作:1.摁住鼠标右键可以复制模块 也可左键框选后右键拖放复制 2.摁住shift断开模块与传感器的连接 CTRL并框选输出端接口可以快速连接
搭建MIL闭环仿真—验证AEB算法
一、ADAS/AD 系统仿真架构


 在搭建好静态模型后,给目标车添加动力学模型以及驾驶员模型,也可以添加一个驾驶员视角,并对Simulation Scheduler中的参数进行调节后 build编译并打开Simulink模型
在搭建好静态模型后,给目标车添加动力学模型以及驾驶员模型,也可以添加一个驾驶员视角,并对Simulation Scheduler中的参数进行调节后 build编译并打开Simulink模型
1.对于没有给定轨迹或车辆动力学模型的“车”系统默认为环境对象
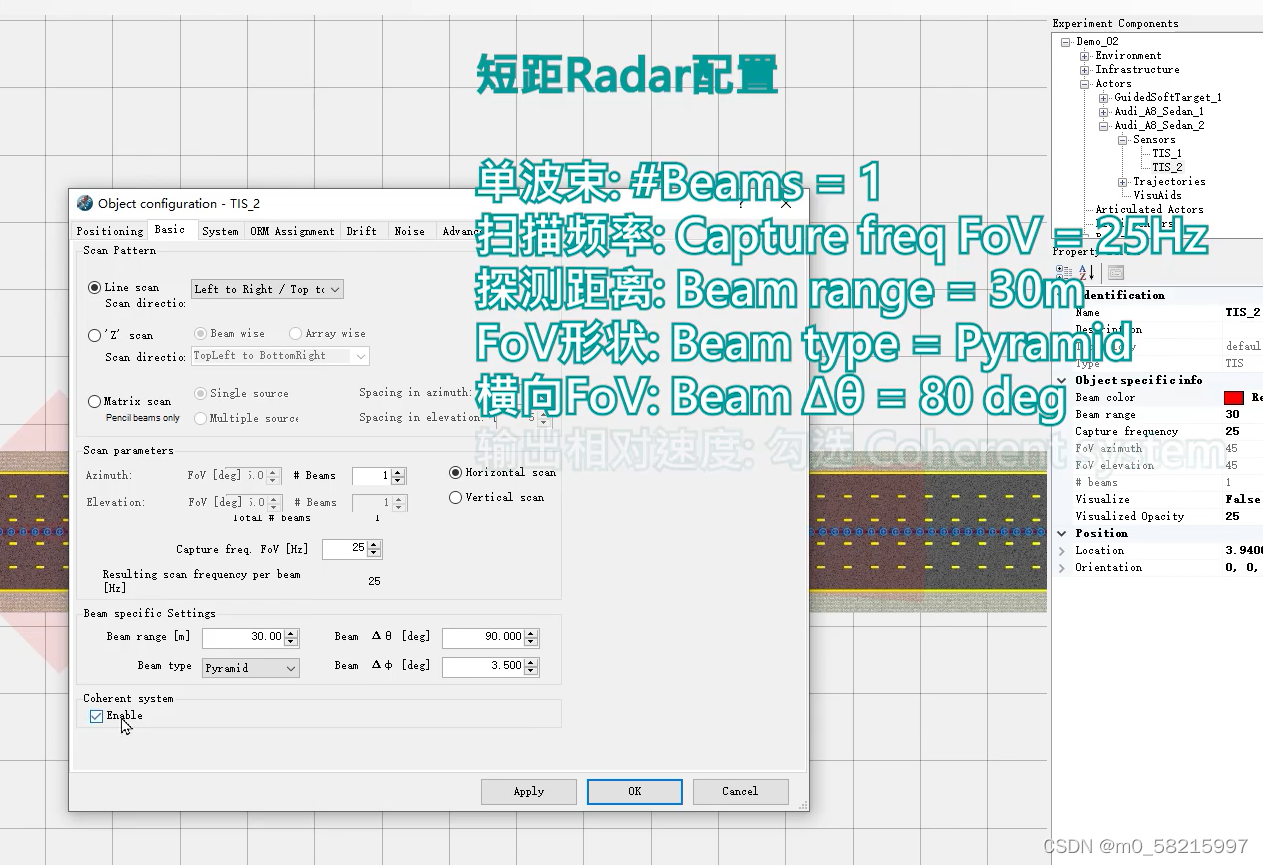
长距和短距TIS传感器模型搭建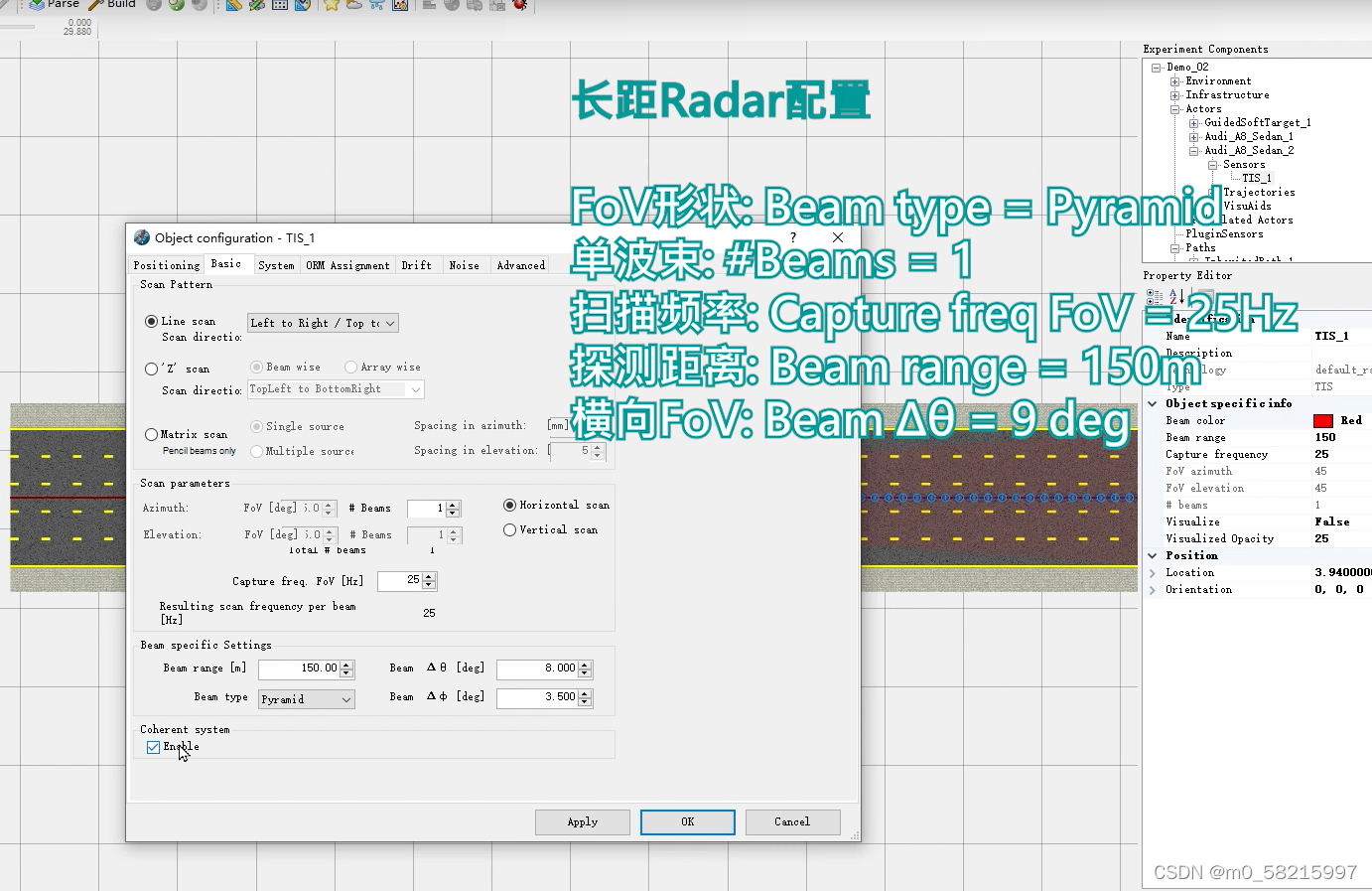


 可以设置不同颜色进行高亮区分
可以设置不同颜色进行高亮区分
三、通过UPD通讯实现Sim闭环仿真
1.prescan的仿真机制和频率设置
1.1

sensor world的频率应是Federate的频率整数倍
Simulink Core的频率是 sensor world的整倍数
Simulink的仿真频率与Algorithms的相关
目录
第一个是仿真速度,二是Sim Cor 三是Simulink

这是问题的解决方案太棒了!!!

第四章:功能讲解
1.雨雪雾等天气的设置Experiment——weather setting (小图标直接进入)
1.1Enable 即打开雾天 1.visibility能见度(m)2.color 【Favorite:可以存储多模板雾天数据】
2.2雨天参数化设置:1.雨滴下落速度(三个方向)2.雨滴密度3.雨滴尺寸(随机生成)4.雨滴进入

2.天空和阳光的设置(小图标直接进)
2.1贴图:三种 蓝天百云 沙漠 山地

修改贴图,手动添加,替换相应图片即可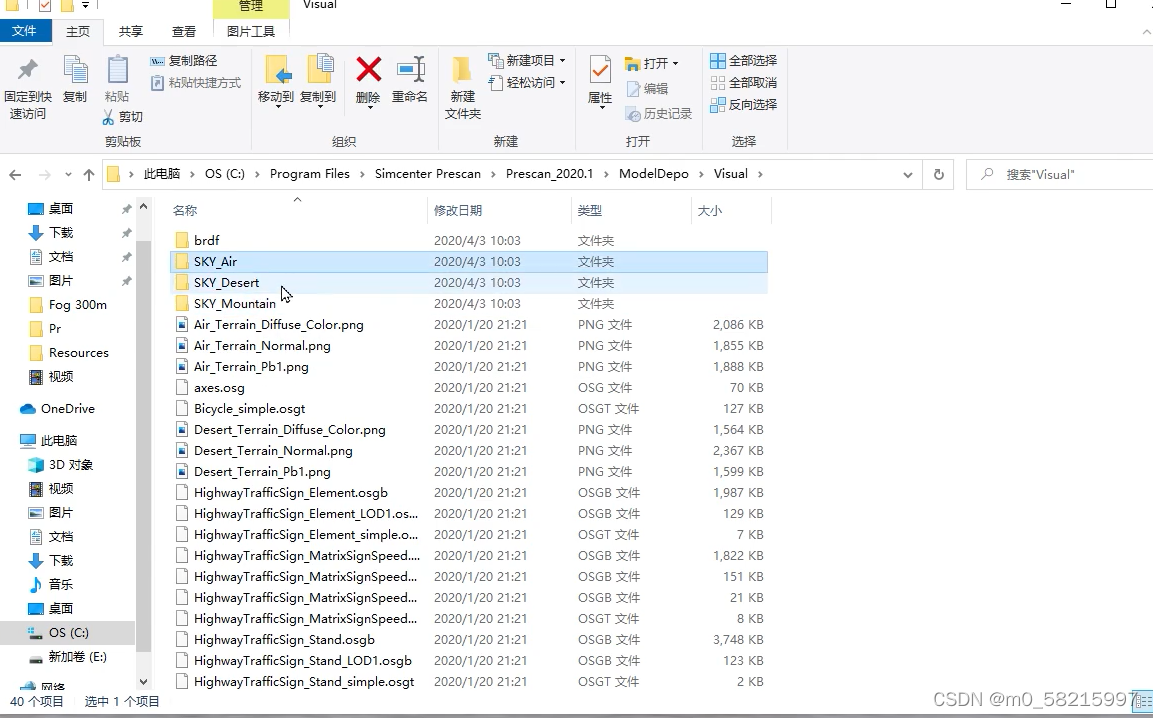
2.2通过计算生成天空:
2.2.1天空浊度 取值0~10 <3代表干燥 偏蓝,>7代表潮湿 偏灰
<3代表干燥 偏蓝,>7代表潮湿 偏灰
2.2.2地面反光率 取值0~1 影响场景中的光照强度
2.3太阳设置:显示 隐示
2.3.1显示情况下
设定三个方向参数以及光照强度参数 自动生成太阳的相关信息
2.3.2隐示情况下:Gps定位以及时间参数设定可设置隐形太阳参数 3主动光源的设置(车灯,路灯,红绿灯)
3主动光源的设置(车灯,路灯,红绿灯)
3.1车灯设置:Object configuration——lighting
光强度 位置 朝向 颜色 光形图
3.1.1类似于一种开关,接入光强 0 可实现灯光的开关 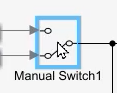
3.1.2刹车灯的设置,用制动信号作为输入接口 再介入光强 即可实现

3.2路灯的设置:Object configuration——lights (在Sim中其模块内容与车灯一致)
各个模块的含义:温度(RGB) 光强(max) 位置 (中心)

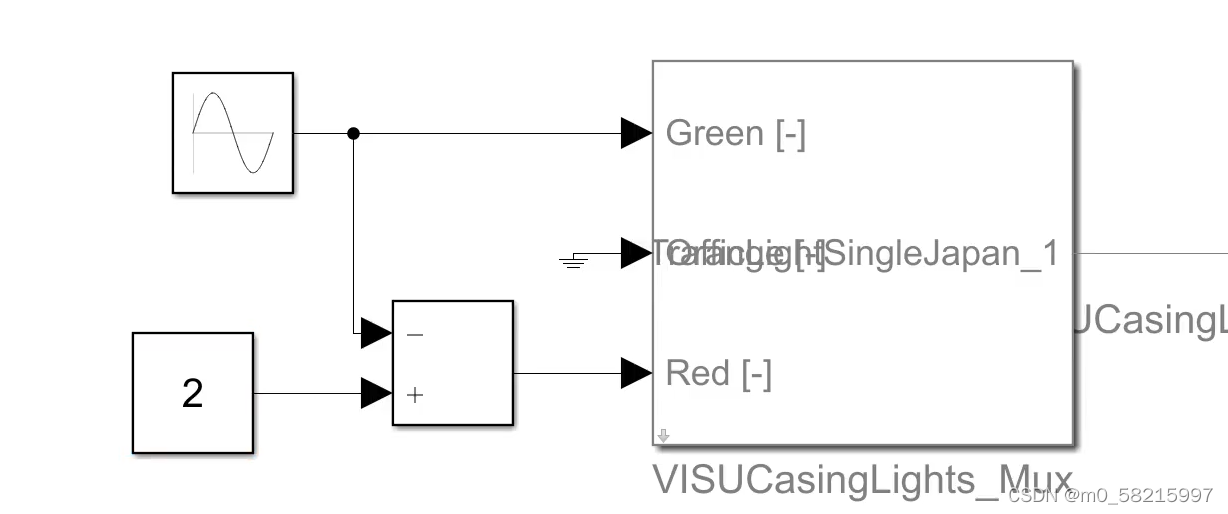
4.红绿灯的控制(信号大于1则亮):
 正弦信号输入
正弦信号输入  -+
-+
第五章:
1.道路模型及其参数设置
1.1直道类:直道 人行横道 并道 高速出入口

1.1.1直道 ![]() 其含义是沿X方向可行使车道数
其含义是沿X方向可行使车道数
![]() 宽度是单条车道的宽度
宽度是单条车道的宽度
Settings ——preferences 中有更多关于道路参数的设置
双击道路可进入道路编辑状态,摁住CTRL可以进行道路长度延长
1.1.2坡道 :高度或坡道角度![]()
![]()
![]() 可添加路基 ,用于制作有坡度的道路
可添加路基 ,用于制作有坡度的道路
1.1.3人行道:![]() 斑马线宽度
斑马线宽度
1.1.4高速出入口:![]() 隔离带类型
隔离带类型
1.2 弯道: 圆弧 类 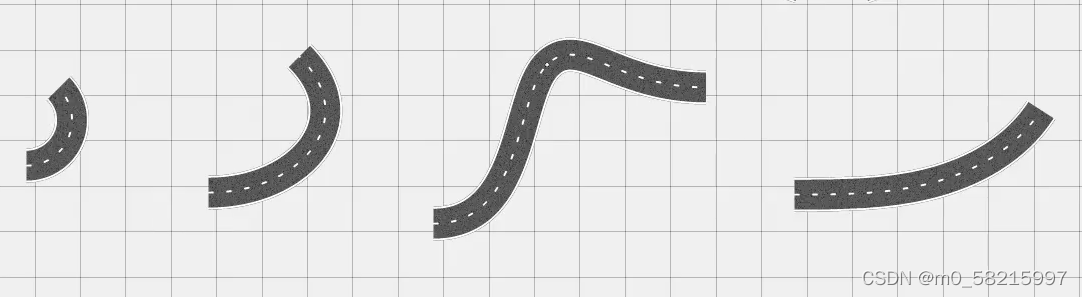
1.2.1弯道 可添加节点add 或remove
split road 在该节点处断开
搭建一个闭合路网必须使用Curve Road 或者FlexRoad
1.3路口: 环岛 十字路口 Y字路口

1.3.1环道 ![]() 顺时针或者逆时针
顺时针或者逆时针
对每个路口进行编辑 Edit road end

![]() 圆角大小
圆角大小
![]() 偏移量
偏移量
也可双击进入编辑状态
1.3.2十字路口
![]() 圆角 (转弯半径 )
圆角 (转弯半径 )
也可右击点Edit Road end 进入编辑(同上)
注意点:
1车辆的行驶轨迹需要建立在有连接的道路上
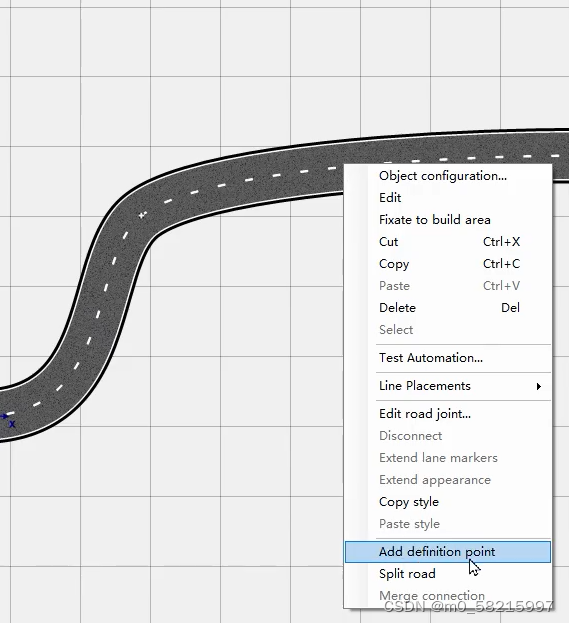
2. 可添加道理节点数
可添加道理节点数

3. 固定道路防止移动
固定道路防止移动
2道路搭建实例
2.1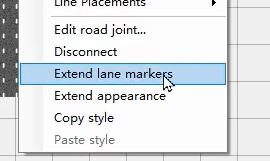 快捷操作:与已设置道路有相同参数
快捷操作:与已设置道路有相同参数
Extend lane markers 同步车道线 Extend appearance 同步道路面,车道线,路肩的参数
 copy style 和paste style 可以复制道路和粘贴道路
copy style 和paste style 可以复制道路和粘贴道路
可以实现隔断复制道路信息
3车道线以及路面设置
3.1 快捷操作:直接对右边图形进行点击,然后修改参数


3.2在类型选择中,可以通过鼠标滚轮进行选择
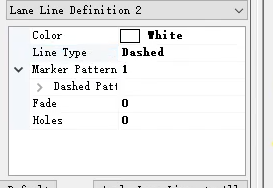 fade 褪色 holes 磨损
fade 褪色 holes 磨损
3.3路旁参数设置:可添加树木路障等
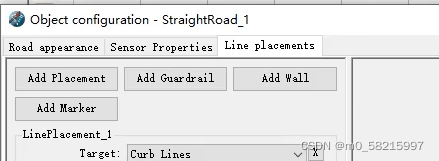
摆放位置
选择路障类型 中间间隔距离 初始路障位置
也可右击选择line Placements 选择添加相应的路旁模型

第六章:导入外部贴图以及3D模型
1.导人外部贴图
Experiment ——Resources 或上方菜单栏的小图标

![]()
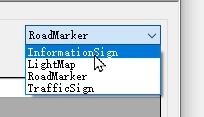 可选择相应类型 交通标识路况信息等 光源,车灯光形图等的
可选择相应类型 交通标识路况信息等 光源,车灯光形图等的
路面上的交通标识 交通标志牌
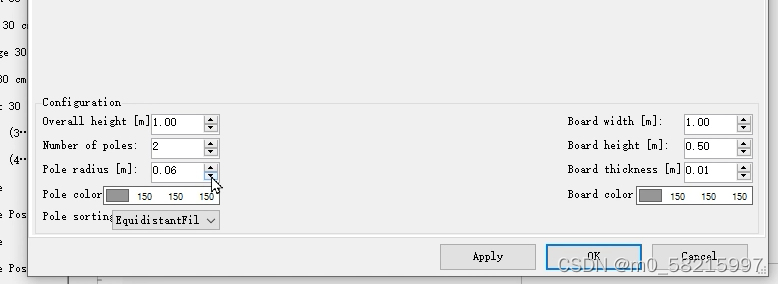
1.1通过add导人图片 Information Board

在resources选中后 调节参数 Fole radius(柱子粗细)
1.2道路贴图:选择Road Markings 上的相应标识 (可编辑标识)
右侧属性栏也可进行相应的编辑


1.3Light Map设置
Animated Elements(动画元素) 下的Light Post 右击Object configuration
![]()
勾选Light 
进行类型选择
1.4Traffic sign :
选择custom sign 
右击选择Assign plate 
2.导人外部模型,用MPT

模型属性设置
1.Canvas data 模型基本属性——质心位置坐标 、原点位置、类型(影响模型出现在prescan中的位置)
2.Material regions 更改模型的材质属性
3.Recolor regions 修改物体颜色
4.Animations 模型动画
5.Vehicle dynamics 给车辆模型添加prescan自带的2D、3D模型
6.Wheels 定义车轮以及其与地面的约束关系
7.Joints (groups)定义相对关系:车轮转动、车体运动
8.Light 定义光源如车灯
9.Sensor mounts 设置传感器安装位置的参看点(默认在原点位置)
模型所在位置
使用prescan中的光照条件以及环境 tools 中的lighting
坐标原点位置:取值范围是0~1 ![]()
质心位置![]()
3D模型后缀.dae .osgb .pgmb
将导入模型进行参数化设置后保存,并将文件夹移至prescan的按照目录下
更新模型库后需要重启GUI才可以读取新的模型
 一个好用的开源社区
一个好用的开源社区
第七期:导入外部3D车辆模型,3D路面模型
1.车辆模型
1.1使用CAD工具进行模型前处理
1.2使用MPT导入车辆模型
1.2.1右击joints 添加节点wheelFL、FR、RL、RR

1.2.2选择相应节点

1.2.3之后再wheel中选择相应的joints
 在点击define wheels后即生成joint'groups
在点击define wheels后即生成joint'groups
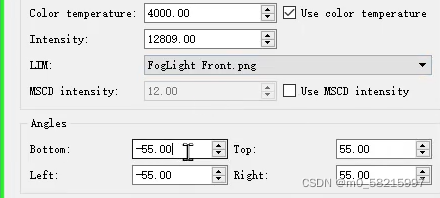
1.2.4Light 右击add进行添加
 选择相应模型
选择相应模型
1.2.5设置对应参数:色温 光强 光形图 对应角度设置
1.2.6传感器安装位置设定:右击add
选择安装的传感器类型以及相应的位置参数

最后 ![]()
1.3视角跟随
选中Sphere
定义位置参数![]()
给Sphere添加一个Human View

1.3 3D路面模型的导人与使用
1.3.1注意修改名称以及类型
![]() 修改为ture 则车辆可计算接触
修改为ture 则车辆可计算接触
第八章
1.坐标系
1.1 Prescan GUI场景搭建全局坐标系 静态元素,如道路,建筑物 采用局部坐标系原点
交通参与者,如车辆,行人 采用质心
1.2车辆运动参考坐标系 质心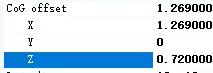

1.3车载物体参考坐标系 车辆后轴中心接地点 如设置传感器 人眼视角 车辆质心位置时采用
1.4传感器坐标系 传感器安装位置
第九章
1.车辆需要首先配置有车辆动力学模型,才可以添加驾驶员模型
Path Follower:路径跟随控制器
Game Contioller :外接驾驶模拟器接口
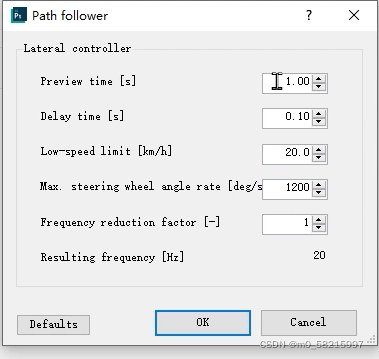
1.Preview time : 驾驶员所能看到的距离(time x 车速)
2.Delay time :延迟时间(做出决策到做出动作之间的反应时间)
4.Max:驾驶员对于车辆的横向控制速率(方向盘转动角速率)
5.与工程的仿真频率相关,

1.方向盘转角2.油门3.刹车4.挡位 (最后给到动力学模型)

相较于轨迹的一个偏移值
初始车速(定值,且小于等于期望车速) 
纵向控制(期望车速) 
2.动力学模型设置

brake max (bar)最大制动力 Cw 风阻
2.1drivelines 传动
steering转向 可设置转向比、最大方向盘转角速率
可设置转向比、最大方向盘转角速率
3.Sim部分
 一输出四
一输出四
自动挡挡位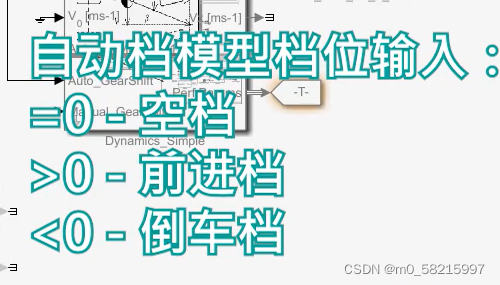
不添加车辆动力模型的情况下,能实现对车辆的控制,可以通过勾选Always 或者其下的任意一处
插入积分  可用于位置信息
可用于位置信息
 单位转换模块
单位转换模块
 微分的加速度 path模块接入得用总线信号接入
微分的加速度 path模块接入得用总线信号接入
场景触发
1.clock  可用于时间触发算法设置
可用于时间触发算法设置
2.时间触发:需要获取信息
在事件发生点设置传感器获取信息
 divide 可将接入的两个信号数据相处并输出
divide 可将接入的两个信号数据相处并输出
 go to 中的数据类型应给位global (可实现信号在其他模块使用)
go to 中的数据类型应给位global (可实现信号在其他模块使用)
 if 模块支持多输入量作为判断条件
if 模块支持多输入量作为判断条件
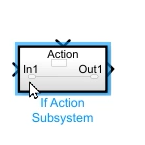 类似于switch的功能
类似于switch的功能
goto 模块可是实现从左到右输出入 goto from可实现从右到左输出入
在constant模块写入变量名,再到第一级面板右击,在Callbacks 的InitFcn*处的面板下进行参数化设置。














 529
529











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









