







第二天打卡
基础场景建模
静态搭建
该过程在Prescan GUI中实现,单击鼠标左键拖动道路至画布,双击后有两种方式修改元素属性,①可以在右下角元素属性进行配置,这里以直道为例,可以设置长度宽度车道线数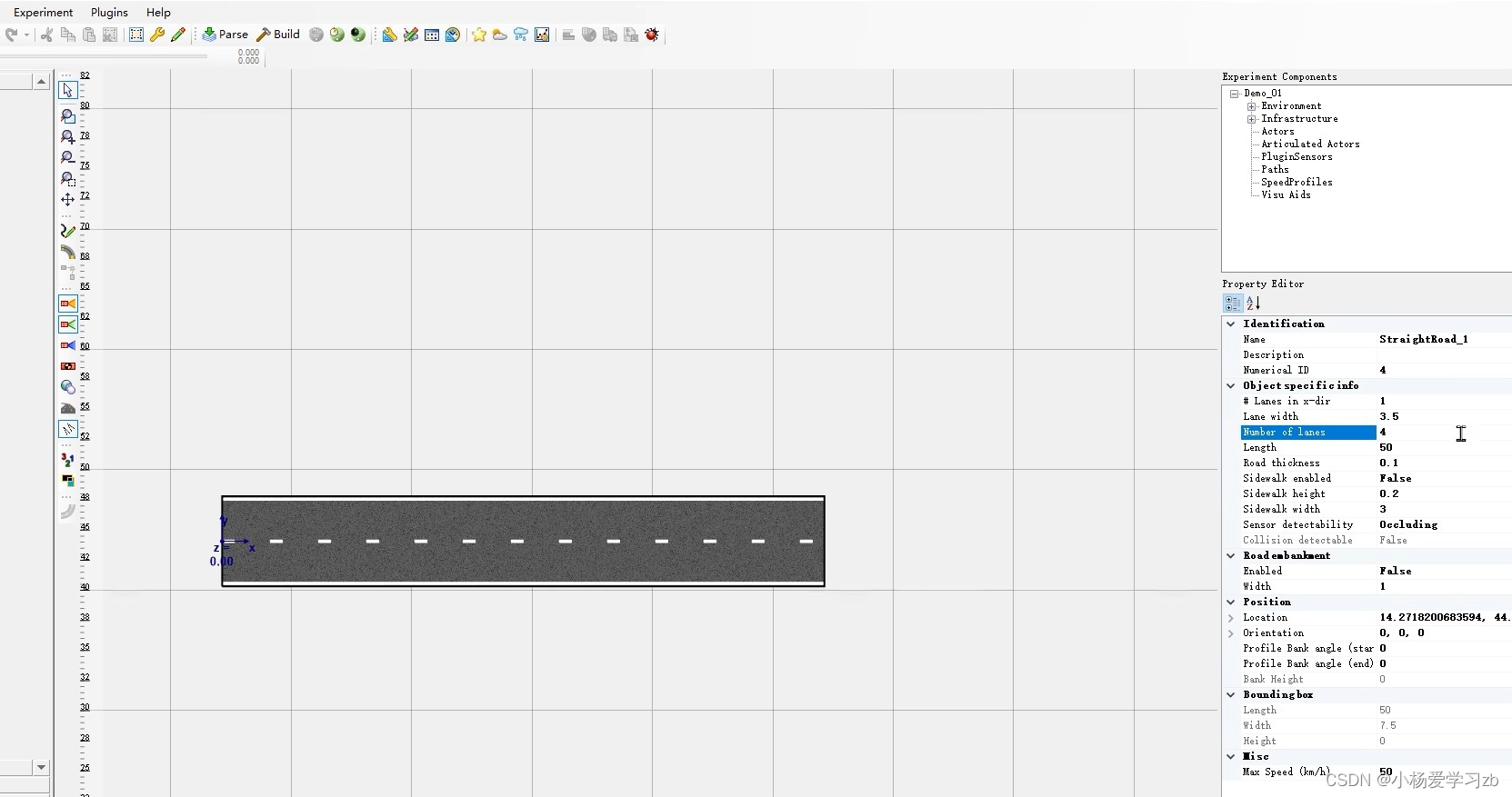
②在元素上单击右键打开configuration进行配置,例:车道线类型、颜色等

另外,在进行道路网搭建过程中,也是通过拖拽的形式进行拼接,当连接处有锁🔒的图标出现时表示已经连接上。

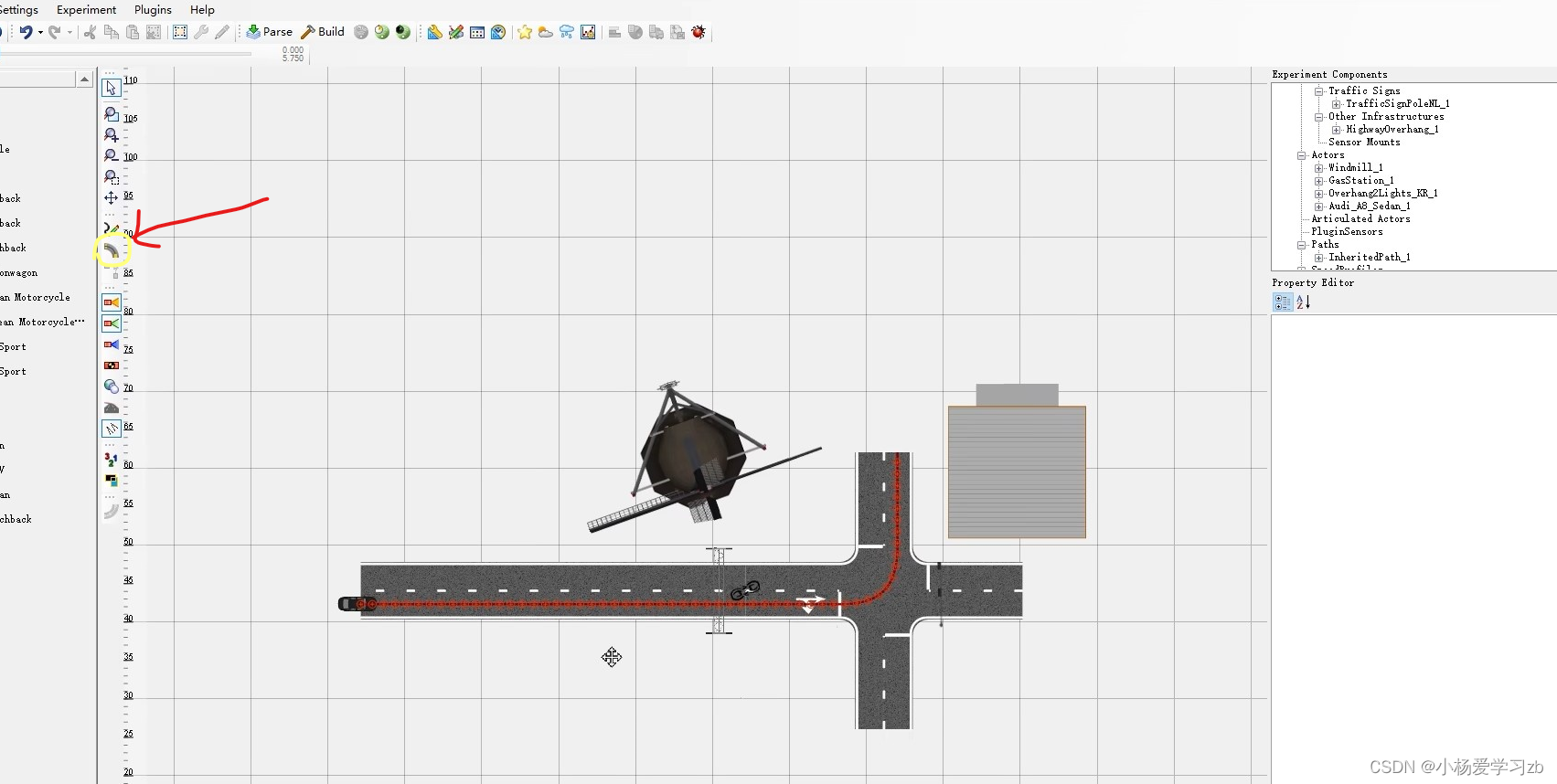
下面是搭建的一个静态部分,其中包括建筑物、高架桥、红绿灯、交通指示灯等,都是以拖拽的杏视进行搭建

动态搭建
在车辆配置上,可以使用红色箭头指示的功能对车辆进行行驶轨迹的设定。
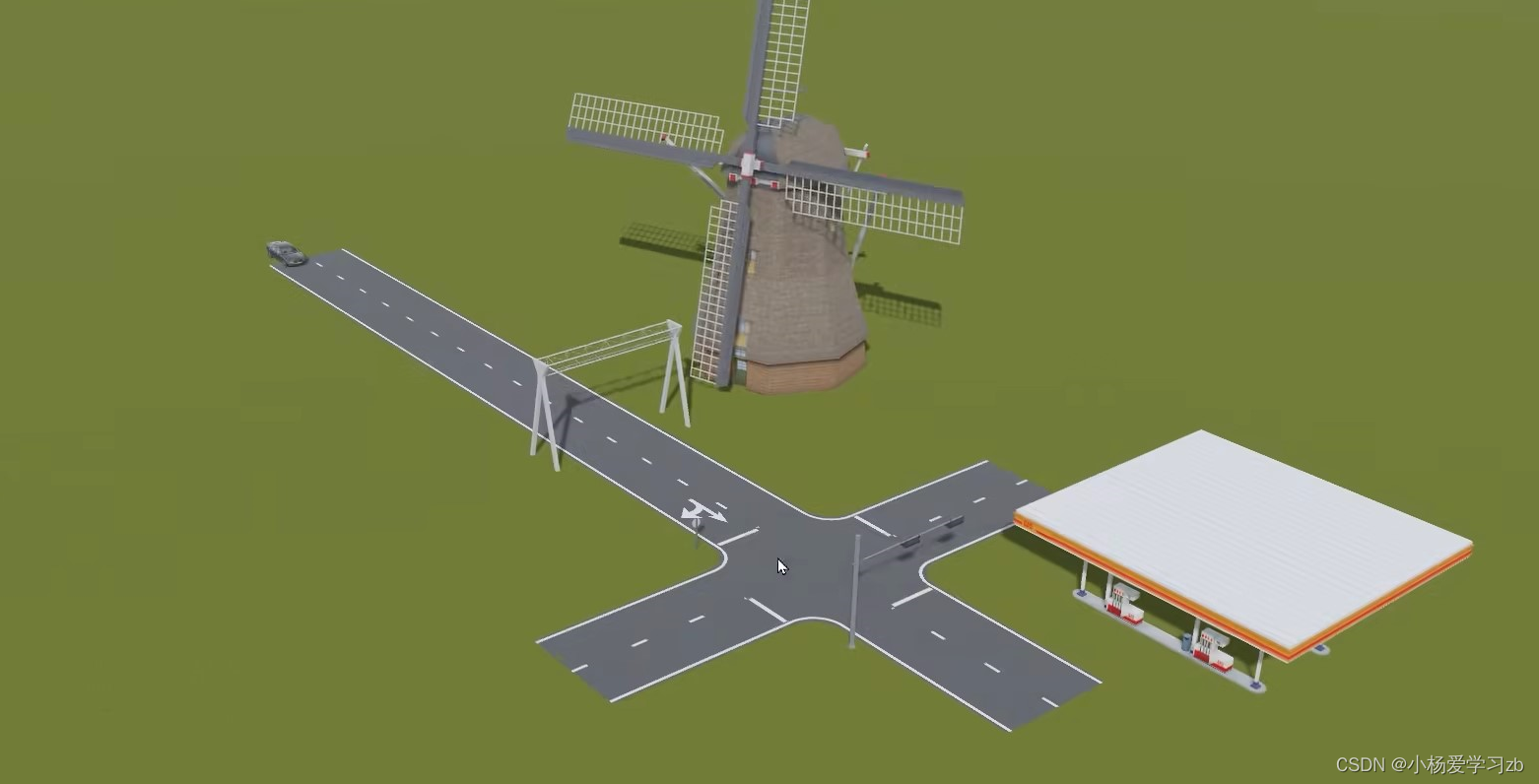
3D场景展示
这样我们就简单搭建了基础的场景,在build后,可以打开Prescan Viewer进行3D视角观察
文件介绍

这里记录下我觉得可以加深新手对文件的理解,因为里面文件太多了,具体了解比较重要的这三个文件,pex就是使用Prescan GUI打开的一个文件,然后每次bulid完就会生成pb文件的模型,然后slx文件是进行算法集成调试仿真需要的,当我们在simulink里更新模型时(笔记一有讲到位置),会将pb文件更新到slx文件里。
仿真测试(动画)
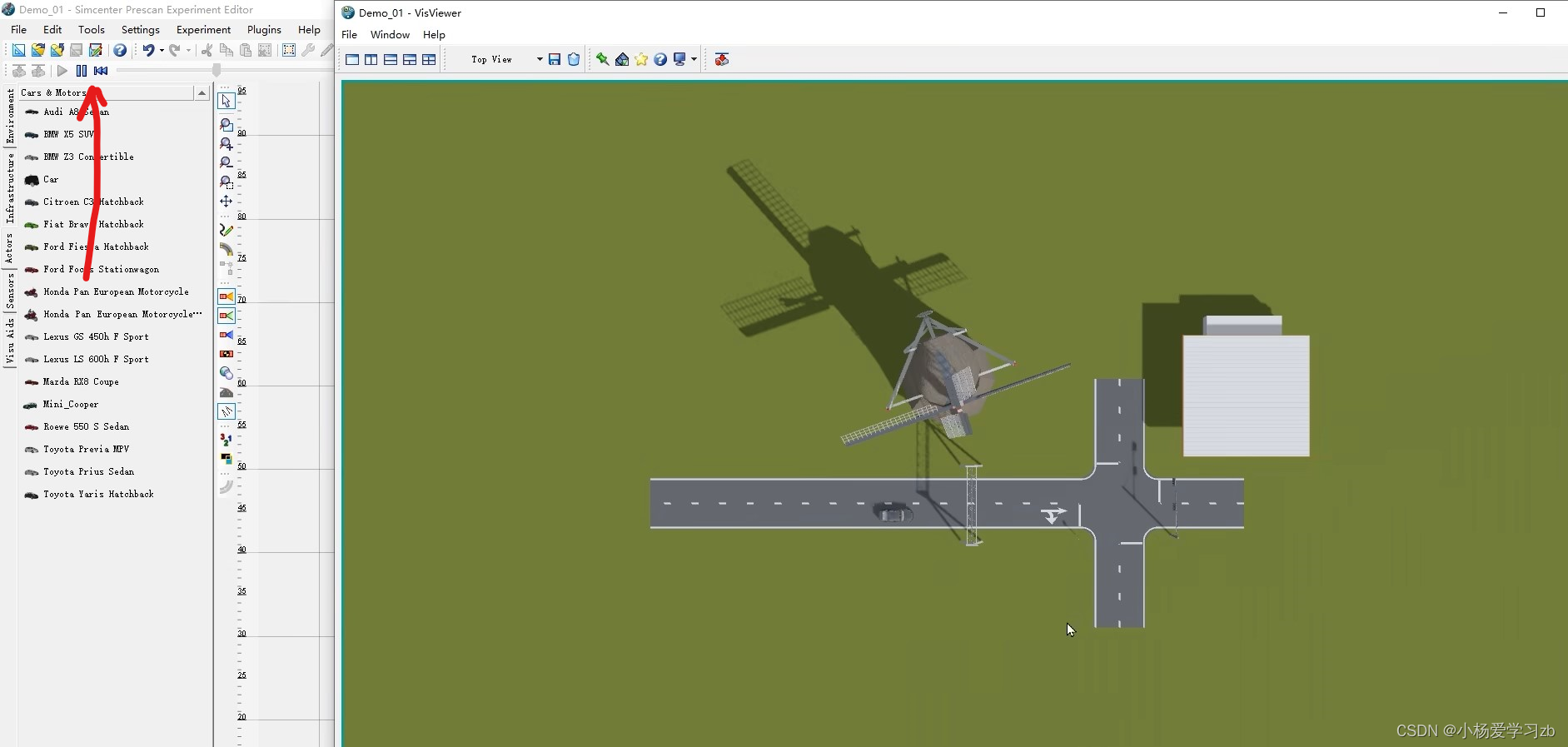
因为前面有预设车辆轨迹,场景也搭建好了,进行初步的一个仿真测试,在GUI里面bulid后,Viewer会自动更新场景,点击播放后打开Viewer可以观测车辆的运行状况。
以上就是介绍了从搭建场景到仿真测试的简单流程,其实就是一个动画,不能叫做真正的仿真测试,Prescan里面也有内设很多传感器雷达可以对车辆速度障碍物检测距离等进行仿真分析。
获取感知信息
配置传感器
为了有实际的仿真输出,我们需要加入传感器雷达等工具,这里我们在主轴上加入一个理想传感器,都采用默认配置。
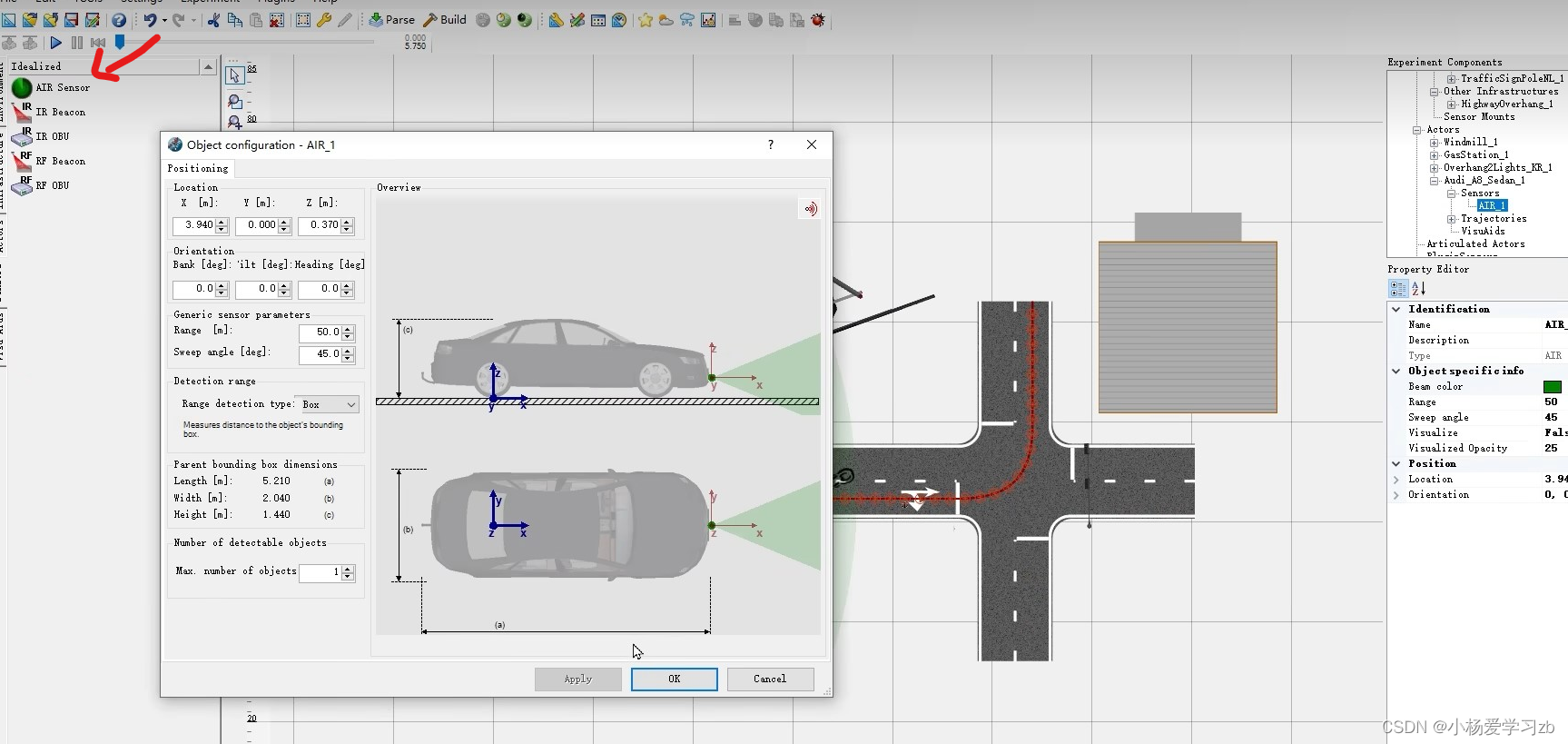
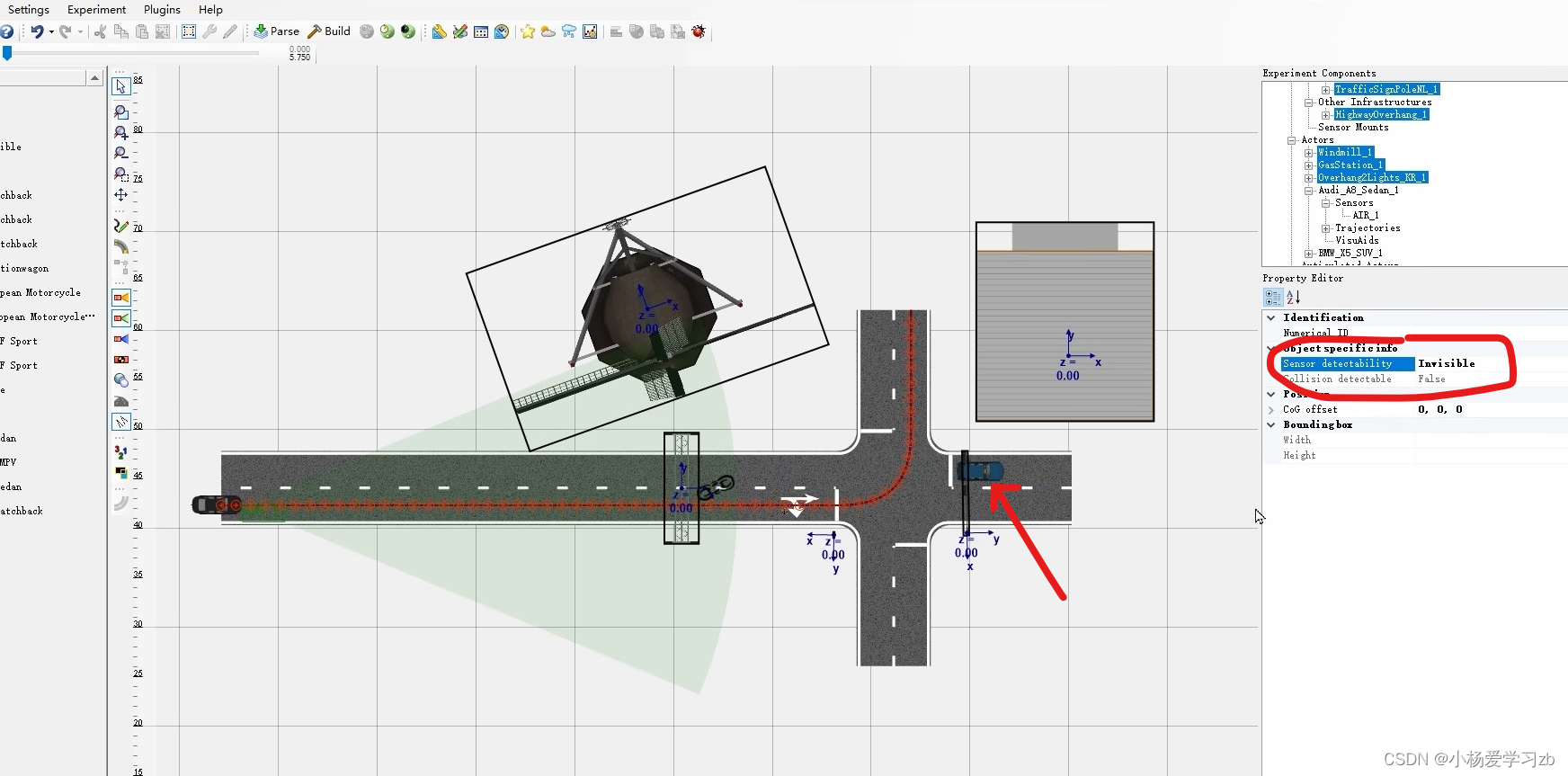
为了观测传感器传输的数据,需要添加一个障碍车如图,这里为了便于观测传感器的数据,将道路上的其他信息设置为不可被传感器检测到(防止数据过多干扰测试)
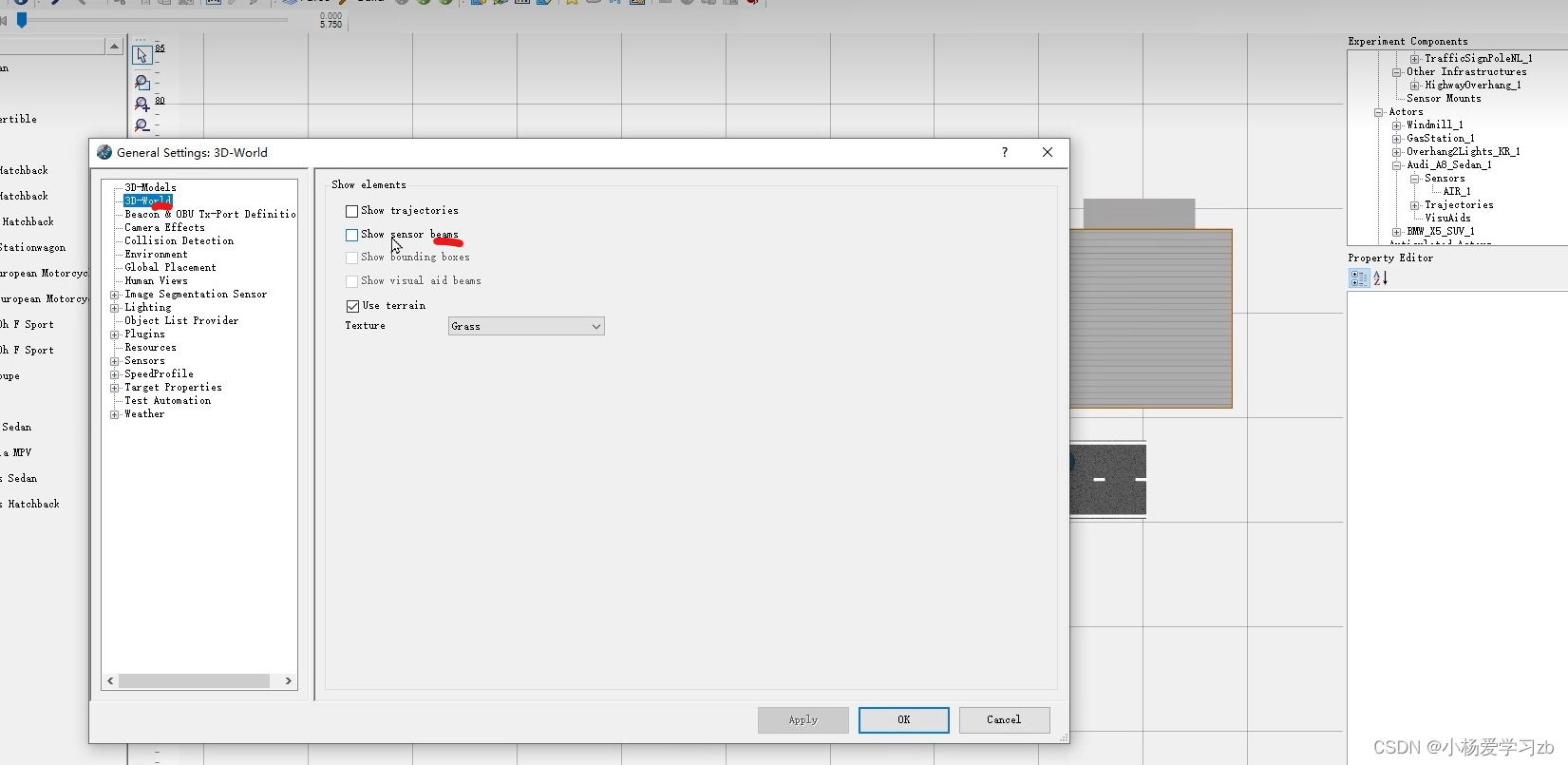
在GUI中我们可以看到传感器检测的范围,但如果需要Viewer也看到感知范围的话,需要进行两处设置。
①是需要进行全局设置,在experiment里面的general setting里面,3Dworld里面勾选show sensor beams。

②是需要在传感器本身属性栏中将可视化勾选为True。

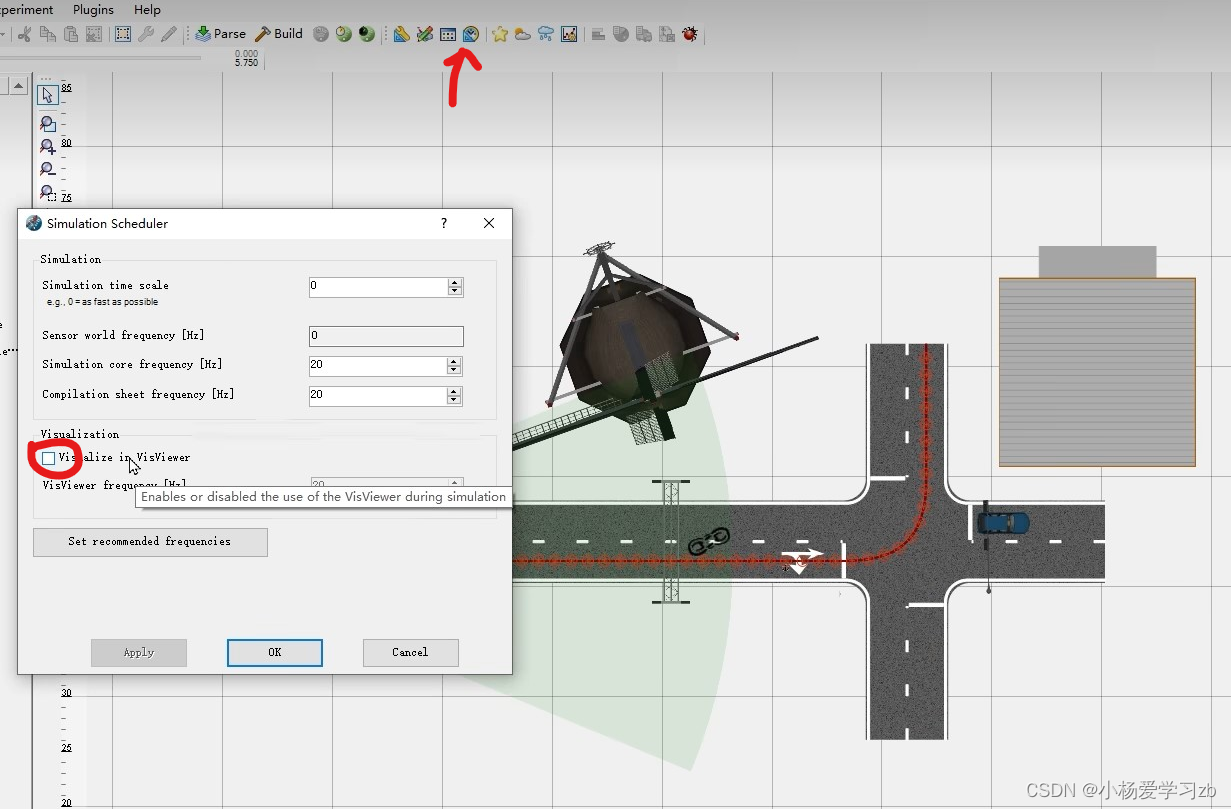
为了让viewer在仿真过程中实时更新画面,还需要在simulation scheduler里勾选visualize in viewer。
观测参数配置
这里对传感器的搭建已经基本完成,为了观测到测试后仿真的输出结果,我们需要打开simulink,如下图我们可以看到在车辆配置上有传感器的一个模块,其中包括距离角度等输出,这里举例将出传感器的距离感知结果输出出来,添加一个scope输出模块进行数据观测。
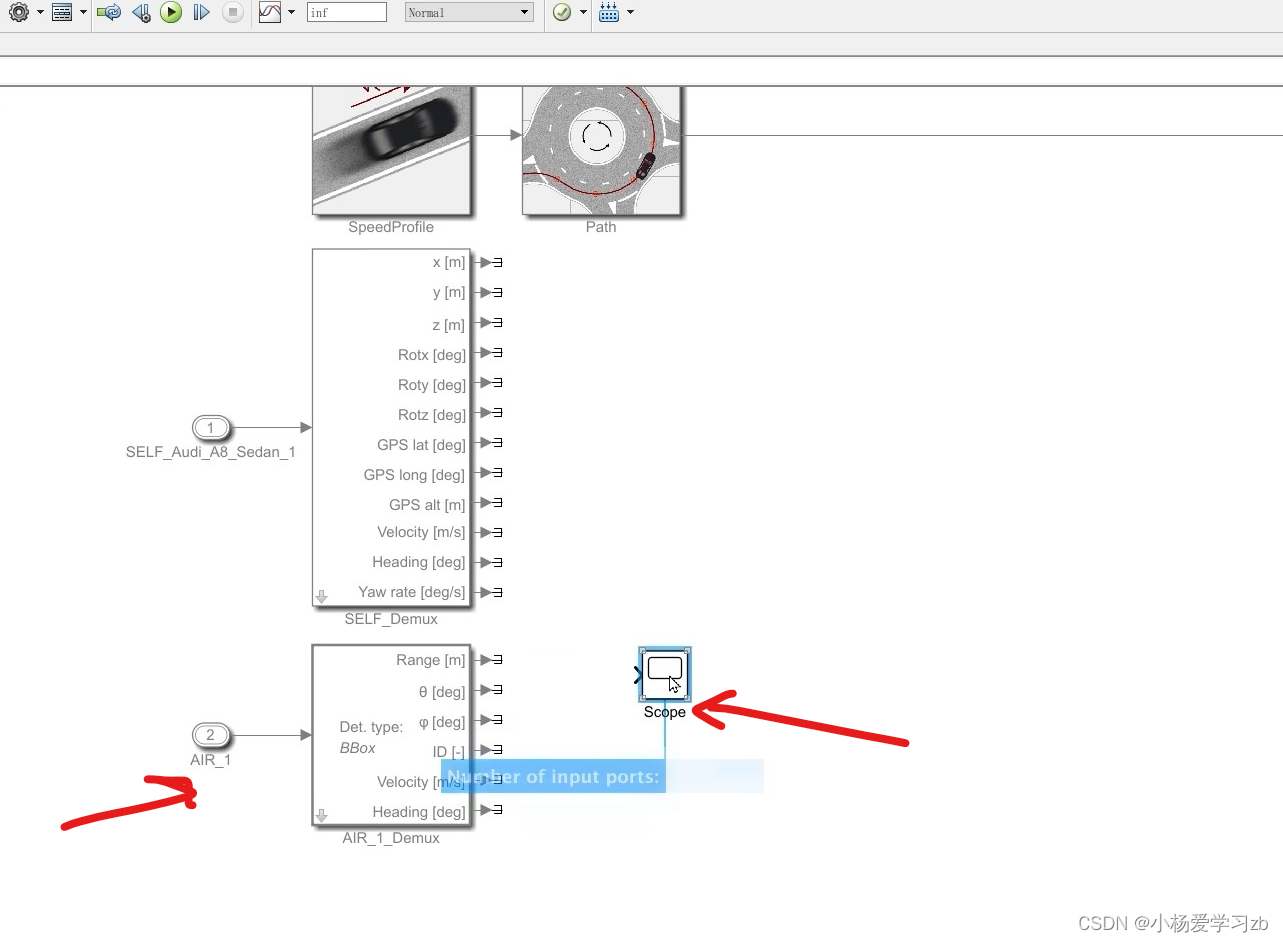
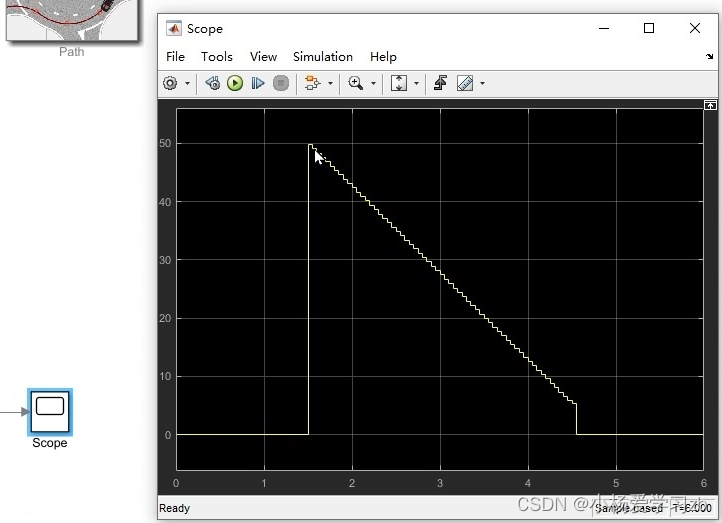
在进行仿真测试后,我们可以双击scope对接受的数据进行观测,这里我们根据设定的场景进行分析,最初汽车距离障碍车很远(传感器无法检测到)时,数据显示为0,当检测到障碍车时,刚好为50m(这也反映了传感器的探测范围最大为50m,之后主车匀速行驶,最后在距离五米处转弯驶向另一车道,传感器数据又归零)
小技巧Tips
在simulink里面可以通过菜单栏的模块模组寻找拖拽,也可以双击左键输入关键字设置模块,另外按住ctrl点击需要连接的两个模块就会自动连接。















 935
935











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









