










2022全国大学生数学建模竞赛B题论文思路解析
国赛B题
无人机遂行编队飞行中的纯方位无源定位

问题分析
第一问
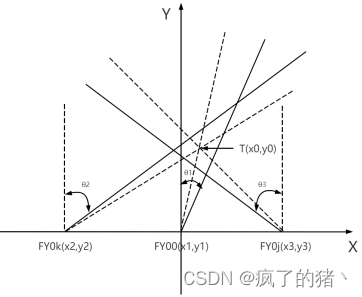
针对问题一第一问,题中仅提供了角度信息,仅依靠角度确定坐标,针对纯方位定位问题,题中提出由三架无人机进行发射信号,其中包括FY00与另外两架在圆周上的无人机,且在题中仅有方向信息,选用多站交叉定位、多站模糊区域定位模型。
第二问
针对第二问,说明需要两架及两架以上数量的无人机进行发射信号定位,且在题中说明了发射信号无人机的定位无偏差,那么可以沿用上一部分模型,针对不同数量人机发射信号进行仿真,确定具体无人机架数,实现无人机有效定位。
第三问
针对第三部分,题中给出了各个无人机的初始极坐标,九架无人机需要均匀分布在圆周上,那么说明每隔40度就需要分布一架无人机,而初始时刻的无人机位置都有偏差,先进行角度校正,而要在同一圆周上就需要半径一致,则在各个无人机朝半径方向移动校正距离,迭代使其逼近准确位置。
问题重述
本文提出了两个核心问题:
-
问题一:在十架无人机的圆形编队中,如何通过少量无人机发射信号来实现有效定位。具体包括三部分内容:
-
采用多站交叉定位和多站模糊区域定位模型,分析误差偏转角对定位精度的影响。

-
增加发射信号的无人机数量,从两架到九架,分析定位精度的变化。
-
确定最优的无人机发射信号组合,以实现最佳的定位精度。
-
-
问题二:在不同编队形状下,如何优化无人机的编队方案以提高定位精度。包括:
-
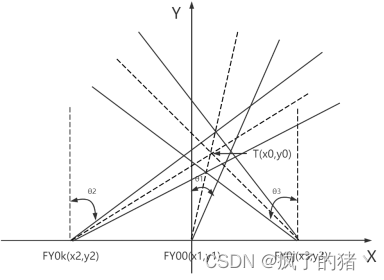
采用邻位三站协同定位,计算并优化无人机的位置和角度。
-
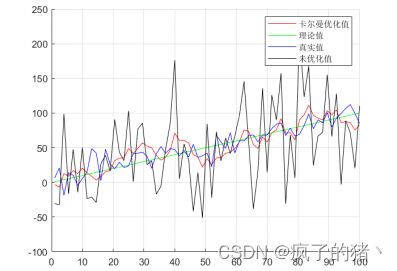
使用卡尔曼滤波消除角度测量噪声,进行仿真分析以确定最优定位方案。
-
模型建立和求解
问题一的模型
-
多站交叉定位模型:
-
利用三架无人机发射信号形成交叉定位,通过误差区域的三角形选择内心作为目标定位点。
-
通过MATLAB仿真验证模型性能,在误差偏转角较小时,多站模糊区域定位模型表现更好;在误差偏转角较大时,多站交叉定位模型表现更好。

-
-
多站模糊区域定位模型:
- 误差区域的面积作为目标定位范围,使用几何精度因子(GDOP)进行仿真分析,比较两种模型在不同误差偏转角下的性能。
问题二的模型
- 增加发射信号的无人机数量从两架到九架进行仿真分析,发现三架无人机发射信号时定位偏差最小,因此除FY00与FY01外,还需增加一架无人机发射信号。

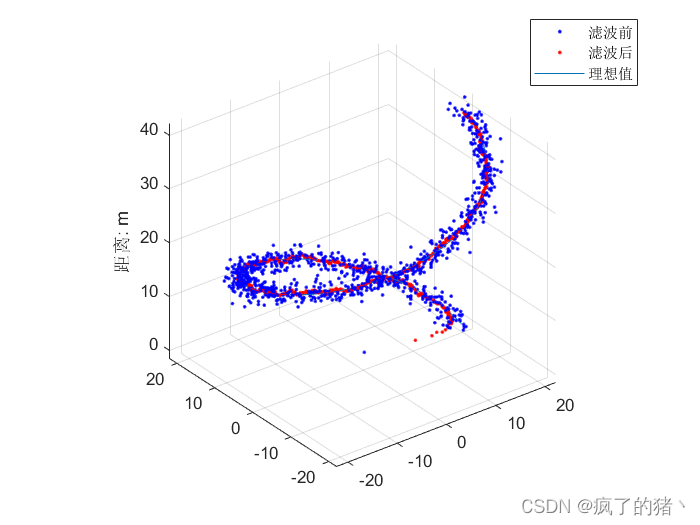
- 选择邻近无人机对目标进行定位,通过计算角度和位移系数进行位置优化,采用卡尔曼滤波消除角度测量噪声,多次迭代仿真以确定最优定位方案。

仿真和结果
-
多站交叉定位和多站模糊区域定位:
- 在误差偏转角较小时,多站模糊区域定位模型的定位精度更高;在误差偏转角较大时,多站交叉定位模型的定位精度更高。
-
定位精度优化:
- 通过不断调整发射信号的无人机数量和位置,得到了最佳的无人机编队方案,确保定位精度最高。具体仿真结果表明,三架无人机发射信号时的定位误差最小。
结论
本文总结了纯方位无源定位技术在无人机编队中的应用,强调通过合理的数学模型和仿真可以显著提高定位精度。研究结果为无人机的高效使用和安全管理提供了技术支持。
















 7693
7693











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











