






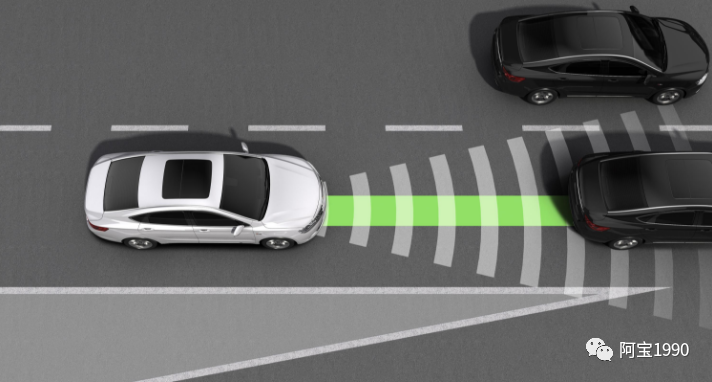
一直以来,激光雷达因能对周围环境实现3D感知而备受自动驾驶主流者的“宠爱”。不过无论是激光雷达还是摄像头、超声波传感器,都容易受到恶劣天气环境影响导致性能降低甚至失效(恶劣天气环境往往是事故高发的主要原因),因而都存在“致命”缺陷!这众时候,毫米波雷达凭借可穿透尘雾、雨雪、不受恶劣天气影响的绝对优势,且唯一能够“全天候全天时”工作的超能力,成为汽车ADAS不可或缺的核心传感器之一。
现在大家购买汽车基本上,都要有以下的辅助驾驶功能,
1. ACC(自适应巡航)
2. BSD&LCA(盲点监测和变道辅助)
3. AEB(自动紧急制动,通常配合摄像头进行数据融合)
而基本上这些功能都是摄像头同毫米波雷达辅助一起完成的,理论上只有摄像头也可以完成,但是回忆瓶颈,使用毫米波雷达可以让整个系统更加稳定和安全。

什么是雷达。

由于我们大学是气象学院的前身,所以学校里面会非常多雷达接收的天线,大脑里面第一时间想到的就是上图这样的雷达场景,如果车上背这么大一个家伙,根本无法行走,所以我们先来看看雷达的工作原理。
雷达是利用无线电回波以探测目标方向和距离的一种装置,用于无线电探向与测距,全世界开始熟悉雷达是在1940年的不列颠空战中,七百架载有雷达的英国战斗机,击败两千架来袭的德国轰炸机,改写了历史。二战后,雷达开始有许多和平用途。
雷达, 是英文RADAR的音译, 源于Radio Detection and Ranging的缩写, 意思为“无线电探测和测距”,即用无线电的方法发现目标并测定它们的空间位置,这也揭示了雷达最重要任务就是检测与目标物体的距离、速度和方向。
毫米波雷达测距原理很简单,就是把无线电波(毫米波)发出去,然后接收回波,根据收发的时间差测得目标的位置数据和相对距离。根据电磁波的传播速度,可以确定目标的距离公式为:s=ct/2,其中s为目标距离,t为电磁波从雷达发射出去到接收到目标回波的时间,c为光速。

神奇的多普勒原理
毫米波雷达测速和普通雷达一样,都是基于多普勒效应(Dopler Effect)原理。当声音,光和无线电波等振动源与观测者以相对速度相对运动时,观测者所收到的振动频率与振动源所发出的频率有所不同。当发射的电磁波和被探测目标有相对移动、回波的频率会和发射波的频率不同。
当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线而去时,反射信号频率将低于发射机频率。由多普勒效应所形成的频率变化叫做多普勒频移,它与相对速度成正比,与振动频率成反比。
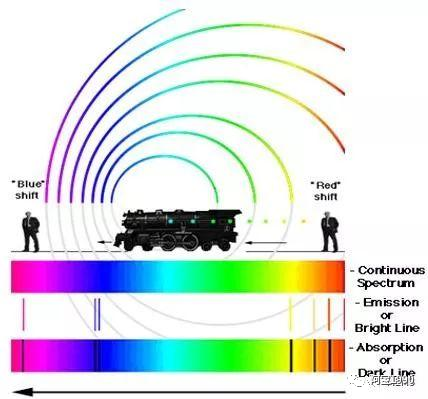
所以,通过检测这个频率差,可以测得目标相对于雷达的移动速度,也就是目标与雷达的相对速度。根据发射脉冲和接收的时间差,可以测出目标的距离。同时用频率过滤方法检测目标的多普勒频率谱线,滤除干扰杂波的谱线,可使雷达从强杂波中分辨出目标信号。所以脉冲多普勒雷达比普通雷达的抗杂波干扰能力强,能探测出隐蔽在背景中的活动目标。

毫米波的频段在哪儿
毫米波(millimeter wave )波长为 1~10 毫米的电磁波称毫米波,它位于微波与远红外波相交叠的波长范围,因而兼有两种波谱的特点。
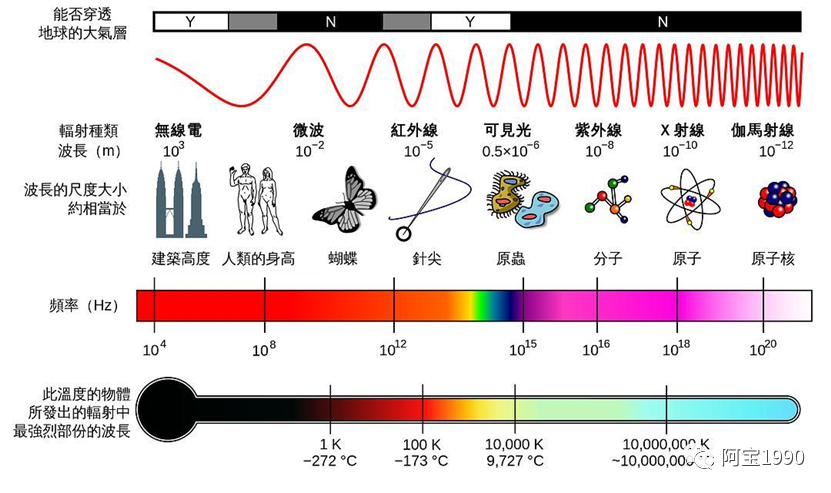
根据波的传播理论,频率越高,波长越短,分辨率越高,穿透能力越强,但在传播过程的损耗也越大,传输距离越短;相对地,频率越低,波长越长,绕射能力越强,传输距离越远。所以与微波相比,毫米波的分辨率高、指向性好、抗干扰能力强和探测性能好。与红外相比,毫米波的大气衰减小、对烟雾灰尘具有更好的穿透性、受天气影响小。这些特质决定了毫米波雷达具有全天时全天候的工作能力。
它具有以下主要特点:
•极宽的带宽:通常认为毫米波频率范围为 26.5~300GHz,带宽高达 273.5GHz。超过从直流到微波全部带宽的 10 倍。即使考虑大气吸收,在大气中传播时只能使用四个主要窗口,但这四个窗口的总带宽也可达 135GHz,为微波以下各波段带宽之和的 5 倍。这在频率资源紧张的今天无疑极具吸引力。
•波束窄:在相同天线尺寸下毫米波的波束要比微波的波束窄得多。例如一个 12cm 的天线,在 9.4GHz 时波束宽度为 18 度,而 94GHz 时波速宽度仅 1.8 度。因此可以分辨相距更近的小目标或者更为清晰地观察目标的细节。
•与激光相比:毫米波的传播受气候的影响要小得多,可以认为具有全天候特性。
•和微波相比:毫米波元器件的尺寸要小得多。因此毫米波系统更容易小型化。
大气窗口和毫米波雷达的频段划分
通常大气层中水汽、氧气会对电磁波有吸收作用,目前绝大多数毫米波应用研究集中在几个“大气窗口”频率和三个“衰减峰”频率上。所谓的“大气窗口”是指电磁波通过大气层较少被反射、吸收和散射的那些透射率高的波段。如图3,我们可以看到毫米波传播受到衰减较小的“大气窗口”主要集中在35GHz、45GHz、94GHz、140GHz、220GHz频段附近。而在60GHz、120GHz、180GHz频段附近衰减出现极大值, 即“衰减峰”。一般说来, “大气窗口”频段比较适用于点对点通信,已被低空空地导弹和地基雷达所采用,而“衰减峰”频段被多路分集的隐蔽网络和系统优先选用,用以满足网络安全系数的要求。
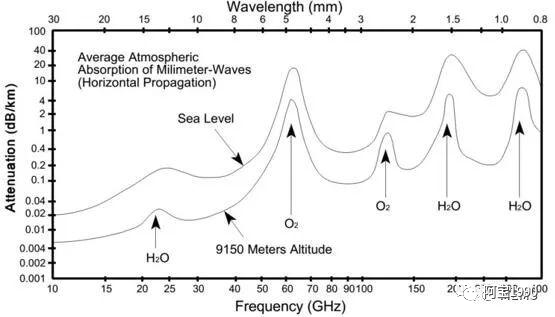
毫米波这个波段频率很高,但是这个频段里很多频率区域的电磁波在空气里传播很容易被水分子、氧气吸收,所以可用的就是几个典型的频段,24、60、77、120GHz。当然24GHz很特别,他严格来讲不是毫米波,因为它的波长在1cm左右。但是它是最早被利用的。现在各个国家把24GHz划出来可以民用,77GHz划分给了汽车防撞雷达,24Ghz也在汽车里用得最早。

24GHz将被更高频代替。由于欧洲电信标准协会和美国联邦通信委员会制定了频谱法规和标准,24GHz的UWB将被淘汰。截至2022年1月1日,24GHz超宽带将不再允许在欧洲和美国用于工业用途。60GHz频段的射频使用不受法规的限制,因此60GHz成为全球工业环境中雷达传感应用的良好替代方案。60GHz的使用将会使得波长变短。由于更长的波长需要更大的天线阵列,但是,当波长变短时,可以使天线阵的尺寸减到最小,从而达到相同的性能。

毫米波雷达发展历程
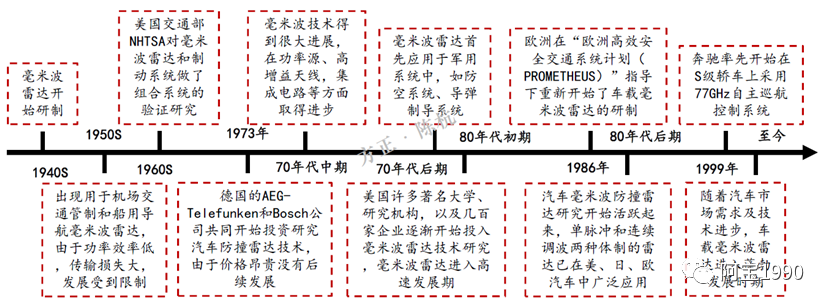
可以看到毫米波雷达在1940年开始研制,真正在汽车上开始研发是1973年,由于价格太昂贵推迟了一段时间,在1986左右开始在汽车上商用,真正在汽车蓬勃发展是在1999年奔驰S级上使用77GHz自主巡航控制系统。














 8379
8379











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









