







池化(Pooling)在目标检测中有重要作用,主要体现在以下几个方面:降维与特征压缩、提取关键信息、增强不变性、降噪与增强鲁棒性等等。其中在目标检测当中我们采用的最多的就是max-pooling和avg-pooling,下面来了解一下这两个池化的实现方式以及适用场景。
1.max-pooling
首先我们通过图示来了解一下max-pooling的大致过程(假设池化窗口为2*2):
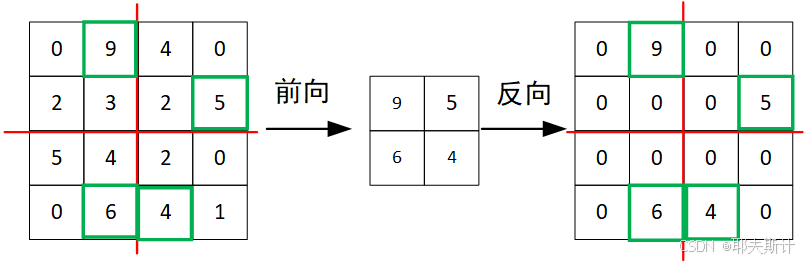
前向:在2*2的max-pooling中,我们将4*4特征图分为四块,在四块区域当中选择最大值。
反向:在前向传播当中,我们选取了四个子区域当中各自最大的值(位置为绿色标记位置)。在反向传播当中我们将最大值位置(绿色标记)置为最大值,其余置为0。
特点:如果将0理解为背景,非0理解为目标。我们可以看到在max-pooling当中只激活了显著(最大值)特征的位置,而将其他弱特征置为0(背景)。因此max-pooling强调边缘、角点和高激活值区域,适合突出目标的关键特征。
2.mean-pooling
同样,我们通过图示来理解mean-pooling的实现过程:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1248
1248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









