






一、准备工作
有关CUBEMX的初始化配置,参见我的另一篇blog:【STM32+HAL】CUBEMX初始化配置
二、所用工具
1、芯片: STM32F407VET6
2、IDE: MDK-Keil软件
3、库文件:STM32F4xxHAL库
三、实现功能
串口打印当前温度值
四、HAL库配置
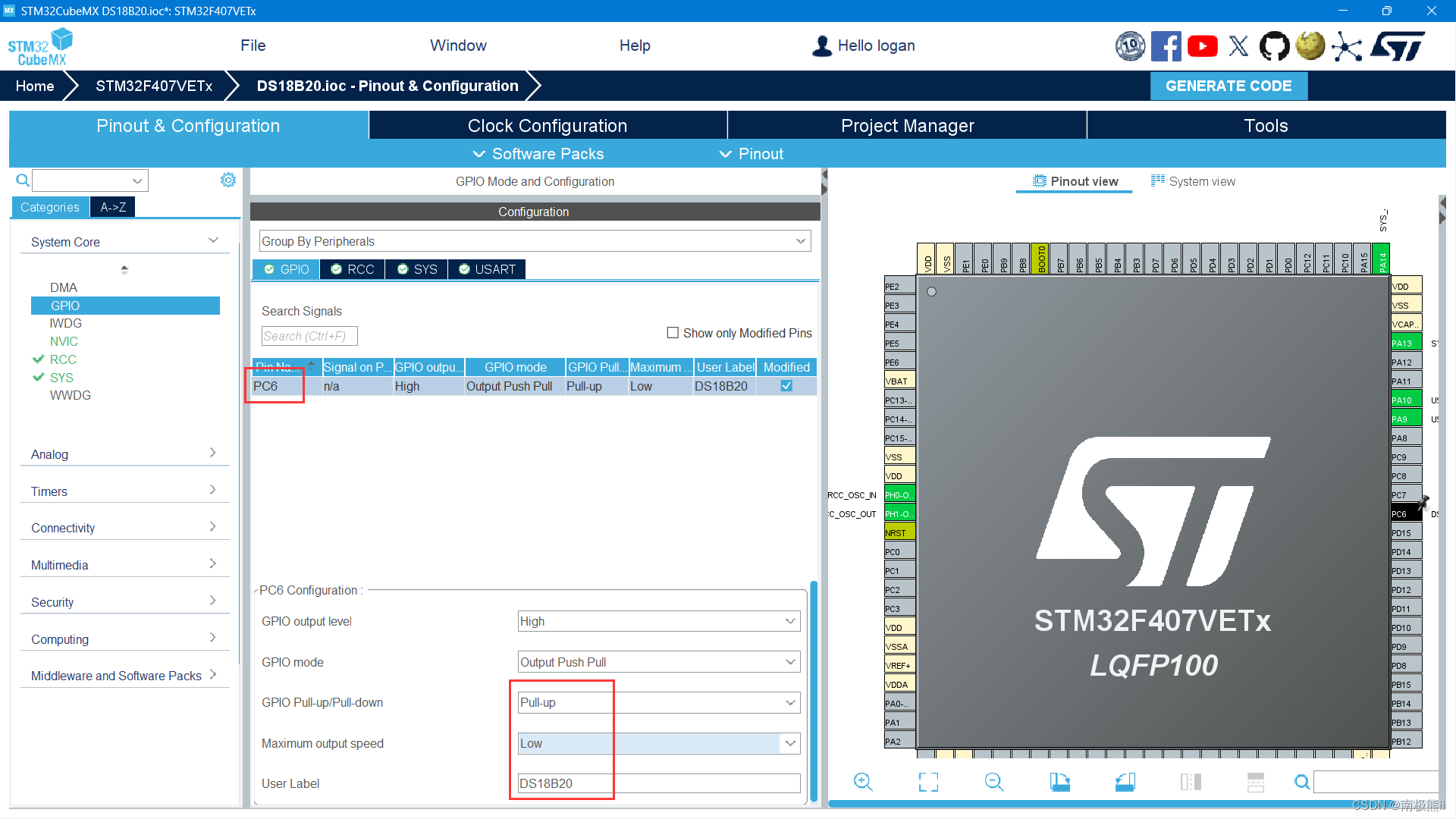
1、选择IO口连接输入输出端口DQ
2、打开串口

至此,HAL库配置完毕
五、Keil填写代码
1、us级延时函数
#define CPU_FREQUENCY_MHZ 168 /* CPU主频,根据实际进行修改 */
/**
* 此延时函数代码适用于HAL库
*/
void delay_us(uint32_t delay)
{
int last, curr, val;
int temp;
while (delay != 0)
{
temp = delay > 900 ? 900 : delay;
last = SysTick->VAL;
curr = last - CPU_FREQUENCY_MHZ * temp;
if (curr >= 0)
{
do
{
val = SysTick->VAL;
}
while ((val < last) && (val >= curr));
}
else
{
curr += CPU_FREQUENCY_MHZ * 1000;
do
{
val = SysTick->VAL;
}
while ((val <= last) || (val > curr));
}
delay -= temp;
}
}2、DS18B20.c
“ DS18B20 传感器的温度数据是以 0.0625 摄氏度为单位进行编码的。因此,为了得到实际的温度值,需要将读取到的原始数据乘以 0.0625。”
文中我先 *6.25,再在结果输出时 /100.0f,如此得到小数点后两位的精度
#include "ds18b20.h"
//#include "tim.h"
#include "main.h"
#define CPU_FREQUENCY_MHZ 168 /* CPU主频,根据实际进行修改 */
/**
* 此延时函数代码适用于HAL库
*/
void delay_us(uint32_t delay)
{
int last, curr, val;
int temp;
while (delay != 0){
temp = delay > 900 ? 900 : delay;
last = SysTick->VAL;
curr = last - CPU_FREQUENCY_MHZ * temp;
if (curr >= 0){
do{
val = SysTick->VAL;
}
while ((val < last) && (val >= curr));
}
else{
curr += CPU_FREQUENCY_MHZ * 1000;
do{
val = SysTick->VAL;
}
while ((val <= last) || (val > curr));
}
delay -= temp;
}
}
static void DS18B20_IO_Init(void)
{
/* 总线空闲为高电平 */
HAL_GPIO_WritePin(DS18B20_GPIO_Port, DS18B20_Pin, GPIO_PIN_SET);
}
static void DS18B20_IO_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = DS18B20_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;
HAL_GPIO_Init(DS18B20_GPIO_Port, &GPIO_InitStruct);
}
static void DS18B20_IO_IN(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = DS18B20_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;
HAL_GPIO_Init(DS18B20_GPIO_Port, &GPIO_InitStruct);
}
static void DS18B20_DQ_OUT(int state)
{
HAL_GPIO_WritePin(DS18B20_GPIO_Port, DS18B20_Pin, state ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
static int DS18B20_DQ_IN(void)
{
return HAL_GPIO_ReadPin(DS18B20_GPIO_Port, DS18B20_Pin) == GPIO_PIN_SET ? 1 : 0;
}
///
/// DS18B20驱动
///
///
//复位DS18B20
void DS18B20_Rst(void)
{
DS18B20_IO_OUT(); //SET PA0 OUTPUT
DS18B20_DQ_OUT(0); //拉低DQ
delay_us(600); //拉低600us
DS18B20_DQ_OUT(1); //DQ=1
delay_us(40); //40US
}
//等待DS18B20的回应
//返回1:未检测到DS18B20的存在
//返回0:存在
uint8_t DS18B20_Check(void)
{
uint8_t retry=0;
DS18B20_IO_IN();//SET PA0 INPUT
while (DS18B20_DQ_IN()&&retry<200)
{
retry++;
delay_us(1);
};
if(retry>=200)return 1;
else retry=0;
while (!DS18B20_DQ_IN()&&retry<240)
{
retry++;
delay_us(1);
};
if(retry>=240)return 1;
return 0;
}
//从DS18B20读取一个位
//返回值:1/0
uint8_t DS18B20_Read_Bit(void) // read one bit
{
uint8_t data;
DS18B20_IO_OUT(); //SET PA0 OUTPUT
DS18B20_DQ_OUT(0);
delay_us(2);
DS18B20_DQ_OUT(1);
DS18B20_IO_IN(); //SET PA0 INPUT
delay_us(12);
if(DS18B20_DQ_IN())data=1;
else data=0;
delay_us(50);
return data;
}
//从DS18B20读取一个字节
//返回值:读到的数据
uint8_t DS18B20_Read_Byte(void) // read one byte
{
uint8_t i,j,dat;
dat=0;
for(i=1; i<=8; i++)
{
j=DS18B20_Read_Bit();
dat=(j<<7)|(dat>>1);
}
return dat;
}
//写一个字节到DS18B20
//dat:要写入的字节
void DS18B20_Write_Byte(uint8_t dat)
{
uint8_t j;
uint8_t testb;
DS18B20_IO_OUT();//SET PA0 OUTPUT;
for (j=1; j<=8; j++)
{
testb=dat&0x01;
dat=dat>>1;
if (testb)
{
DS18B20_DQ_OUT(0);// Write 1
delay_us(2);
DS18B20_DQ_OUT(1);
delay_us(60);
}
else
{
DS18B20_DQ_OUT(0);// Write 0
delay_us(60);
DS18B20_DQ_OUT(1);
delay_us(2);
}
}
}
//开始温度转换
void DS18B20_Start(void) // ds1820 start convert
{
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc); // skip rom
DS18B20_Write_Byte(0x44); // convert
}
//初始化DS18B20的IO口 DQ 同时检测DS的存在
//返回1:不存在
//返回0:存在
uint8_t DS18B20_Init(void)
{
DS18B20_IO_Init();
DS18B20_Rst();
return DS18B20_Check();
}
//从ds18b20得到温度值
//精度:0.01C
//返回值:温度值 (-550~1250)
float DS18B20_Get_Temp(void)
{
uint8_t temp;
uint8_t TL,TH;
short tem;
__disable_irq(); /* 中断可能会单总线的时序从而导致读出来的温度值不正确,所以读取之前屏蔽中断 */
DS18B20_Start(); // ds1820 start convert
DS18B20_Rst();
DS18B20_Check();
DS18B20_Write_Byte(0xcc); // skip rom
DS18B20_Write_Byte(0xbe); // convert
TL=DS18B20_Read_Byte(); // LSB
TH=DS18B20_Read_Byte(); // MSB
if(TH>7)
{
TH=~TH;
TL=~TL;
temp=0; //温度为负
}
else temp=1; //温度为正
tem=TH; //获得高八位
tem<<=8;
tem+=TL; //获得低八位
__enable_irq(); /* 再将全局中断打开 */
tem=(float)tem * 6.25; //转换
if(temp) return tem / 100.0f; //返回温度值
else return -tem / 100.0f;
}
/*
代码使用示例:
int main()
{
float temp;
while(DS18B20_Init())
{
printf(" ds18b20 init failed ! \r\n");
HAL_Delay(500);
}
while(1)
{
temp = DS18B20_Get_Temp();
printf("当前温度:%0.2f \r\n", temp);
HAL_Delay(100);
}
}
*/3、DS18B20.h
#ifndef DS18B20_H__
#define DS18B20_H__
#include <stdint.h>
uint8_t DS18B20_Init(void); //初始化DS18B20
float DS18B20_Get_Temp(void); //获取温度
void DS18B20_Start(void); //开始温度转换
void DS18B20_Write_Byte(uint8_t dat);//写入一个字节
uint8_t DS18B20_Read_Byte(void); //读出一个字节
uint8_t DS18B20_Read_Bit(void); //读出一个位
uint8_t DS18B20_Check(void); //检测是否存在DS18B20
void DS18B20_Rst(void); //复位DS18B20
void delay_us(uint32_t delay);
#endif
4、mian.c
#include "stdio.h"
#include "ds18b20.h"
float temp;
int main(void)
{
while(DS18B20_Init())
{
printf(" ds18b20 init failed ! \r\n");
HAL_Delay(500);
}
while (1)
{
temp = DS18B20_Get_Temp();
printf("%.2f\r\n", temp);
HAL_Delay(1);
}
}六、巨人之肩
七、源码提供
八、结语
本人能力有限,代码未必是最优解,若有可改进之处望在评论区留言,采纳有赏~















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









