







一、PID简介
1、PID时间系数对PID本身的影响:
这里的时间系统,一般指的是采样的时间,也就是PID控制的周期。在无人机当中一般采用10ms控制一次。
一般来说采样周期越小,数字模拟越精确,控制效果越接近连续控制。对大多数算法,缩短采样周期可使控制回路性能改善,但采样周期缩短时,频繁的采样必然会占用较多的计算工作时间,同时也会增加计算机的计算负担。
对于变化迅速的,采样周期应适当减小。对于多回路控制,采样周期应该适当延长,使得有足够的时间控制。
2、PID参数
比例环节:对偏差瞬间作出反应。偏差一旦产生控制器立即产生控制作用,使控制量向减少偏差的方向变化。控制作用的强弱取决于比例系数 ,比例系数越大,控制作用越强,则过渡过程越快,控制过程的静态偏差也就越小;但是也越容易产生振荡,破坏系统的稳定性。
积分环节:虽然会消除静态误差,但也会降低系统的响应速度,增加系统的超调量。
微分环节:阻止偏差的变化。它是根据偏差的变化趋势(变化速度)进行控制。偏差变化的越快,微分控制器的输出就越大。微分作用的引入,将有助于减小超调量,克服振荡,使系统趋于稳定,特别对髙阶系统非常有利。 但微分的作用对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分,或在微分起作用之前先对输入信号进行滤波。
二、位置式PID

优点:静态误差小,溢出的影响小。
缺点:计算量很大,累积误差相对大,在系统出现错误的情况下,容易使系统失控,积分饱和。
使用:一般需要结合输出限幅和积分限幅使用。积分限幅是避免积分失控的一种手段,也是为了加快调节时间,减少积分饱和的影响, 输出限幅是为了使系统输出不过度,也能够减少系统的调节时间,减少超调量。
位置式PID适用于执行没有积分部件的对象。在控制系统中,这种控制量确定了执行机构的位置,例如在阀门控制中,这种算法的输出对应了阀门的位置(开度)。所以,将这种算法称为“位置算法”。

三、增量式PID
增量式PID
- 离散化后的公式:

优点:溢出的影响小,在系统出现错误的情况下,影响相对较小(因为只与过去的三次误差有关),运算量也相对较小。
缺点:有静态误差(因为没有累积误差)。
使用:位置式PID适用于执行有积分部件的对象。当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID的“增量算法”
四、两种针对积分的PID
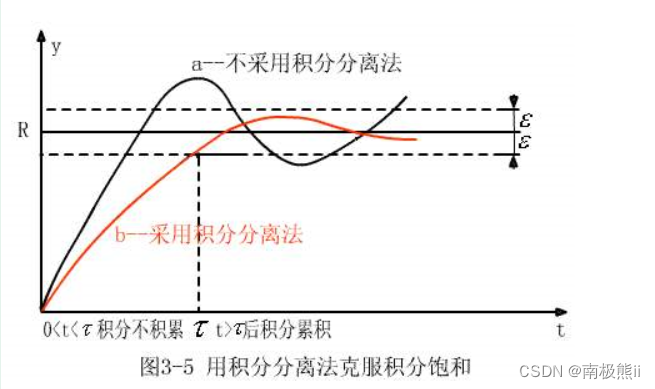
1、积分分离式PID:
积分分离式PID主要是针对位置式PID的积分,引入判断误差大小条件,是否使用积分项。
优点:
判定误差比较大的时候,取消积分项的,使用PD或者P控制,没有I的控制,这样,超调量和调节时间都会同时减少。当误差比较小的时候,引入积分项,消除静态误差。
缺点:
需要经验来确定判断误差的大小,在什么时候使用积分分离比较合适,也就是误差多大的时候取消积分。
应用:
主要用于消除余差,该方法特别适用于生产设备启动阶段的控制。
C语言实现:只需要添加一句判断语句和对积分处理。
无积分分离式的PID:
sptr->Error_sum+=sptr->iError;//积分累加
iIncpid=sptr->Proportion * sptr->iError // P
+sptr->Integral * sptr->Error_sum // I
+sptr->Derivative * (sptr->iError-sptr->Error1); // D
积分分离式PID:
#include<math.h>
int index=0;//积分分离标志
//积分分离处理
if(abs(sptr->iError)> 40) sptr->index=0;
else
{
sptr->index=1;
sptr->Error_sum+=sptr->iError;//积分累加
}
iIncpid=sptr->Proportion * sptr->iError // P
+sptr->Integral * (sptr->Error_sum * index) // I
+sptr->Derivative * (sptr->iError-sptr->Error1); // D
2、变速积分PID:
变积分PID可以看作是积分分离式PID的变体,积分分离式PID 积分的的权重是1或者0,而变积分PID积分的权重会动态变化。取决于偏差,偏差越大,积分越慢。
优缺点和积分分离式PID差不多,只不过,这个变速积分PID更加科学。
积分分离式PID:
#include<math.h>
#define I_MAX 40
#define I_MIN 5
int index=0;//积分分离标志
//变积分处理
if(abs(sptr->iError)> I_MAX) index=0;
else if(abs(sptr->iError)< I_MIN) index=1;
else index=(I_MAX - abs(sptr->iError) / (I_MAX - I_MIN);
if(index!=0) sptr->Error_sum+=sptr->iError;//积分累加
iIncpid=sptr->Proportion * sptr->iError // P
+sptr->Integral * (sptr->Error_sum * index) // I
+sptr->Derivative * (sptr->iError-sptr->Error1); // D
//变速积分也可以这样处理:更加灵活
if(fabs(sptr->iError)> I_MAX) index=0;
else if(fabs(sptr->iError)< I_MIN) index=1;
else if(fabs(sptr->iError>10&&abs(sptr->iError)<20)) index=0.4;
else if(fabs(sptr->iError>30&&abs(sptr->iError)<50)) index=0.8;
else index=(I_MAX - abs(sptr->iError) / (I_MAX - I_MIN);
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1140
1140











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









