






一、前言
最近有项目需要采集4-20mA的传感器电流信号,前期在某宝上购买了4-20mA转RS485的模块,精度十分高,奈何此模块体积较大,又想整合到PCB板上,因此使用了传统的电流采样+运放的方案进行尝试。
二、硬件电路
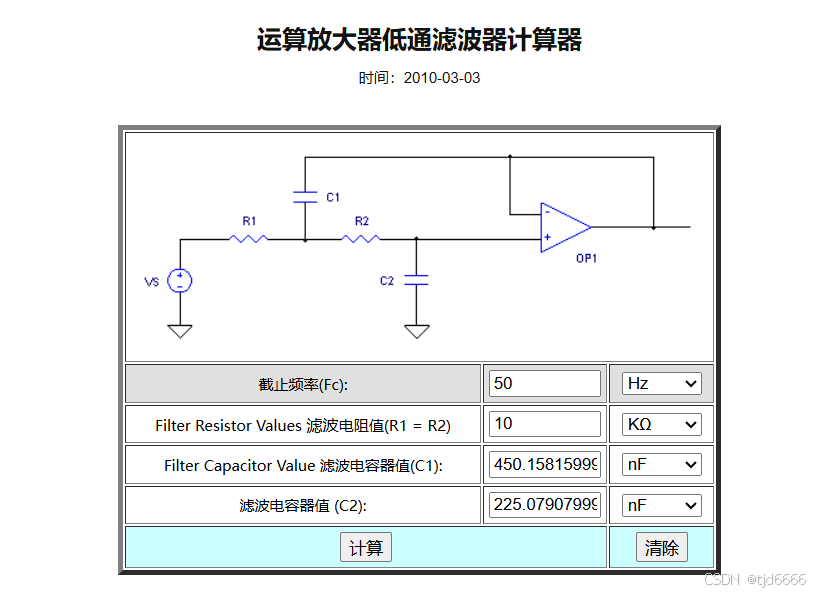
电路图如下图,其中I2_IN接传感器的电流输出+,地接传感器的电流输出-。例如I2_IN为10mA,经过10R采样电阻将I2_IN电压抬至100mV,经过差分放大电路后抬至1V(此电路增益为49.9k/4.99k=10)。后面一级放大电路为50Hz工频滤波,使用在线计算器(运算放大器低通滤波器计算器 - 在线计算器_科学计算器_电阻计算器_在线工具- 21IC电子网)计算得到各滤波电容值。
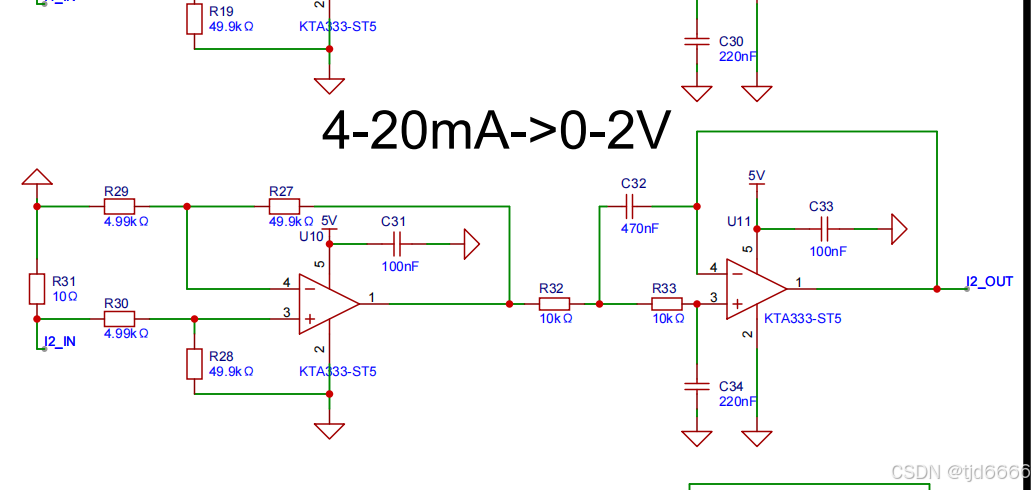
因此,通过此电路可以将4-20mA的电流转换至0-2V范围内,然后通过ADC采样进行读取。
三、软件配置
主控为STM32G474VET6,使用ADC1+DMA采样,配置如下:
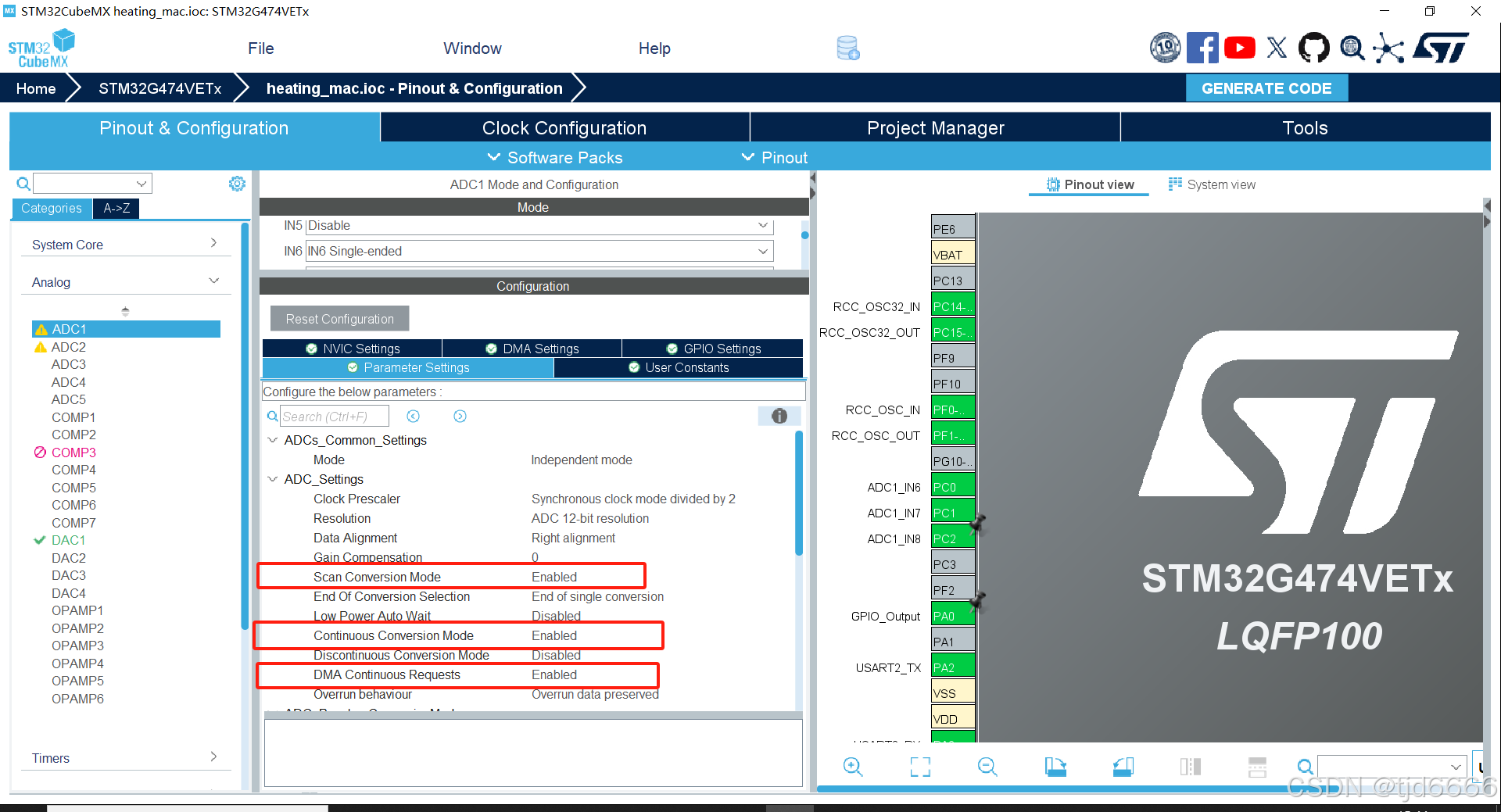
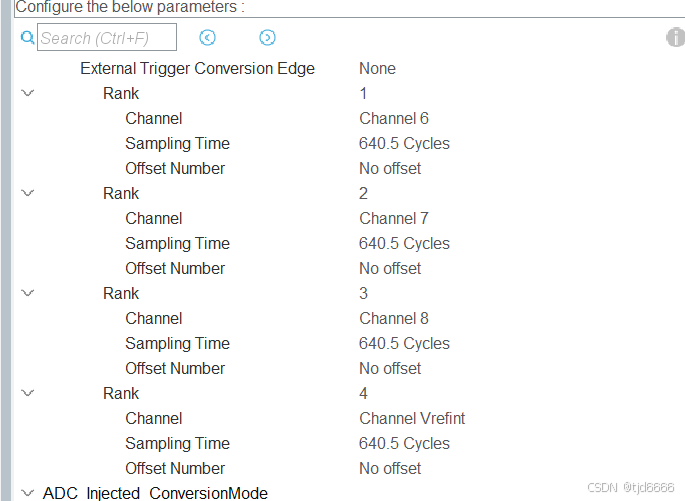
因为项目需要,配置了4个通道,其中3个为4-20mA电流通道,1个为内部基准电压通道,实际调试部分只展示了第一个通道的效果。 采样周期都拉至了最高的640.5个周期。
好了,接下来就是简单的ADC代码读取了。本以为会跟一般的ADC一样,但是出来的结果误差很大,多次排查硬件电路问题后,发现用万用表测出的电压值很稳定,因此问题锁定在软件上。
四、调试部分
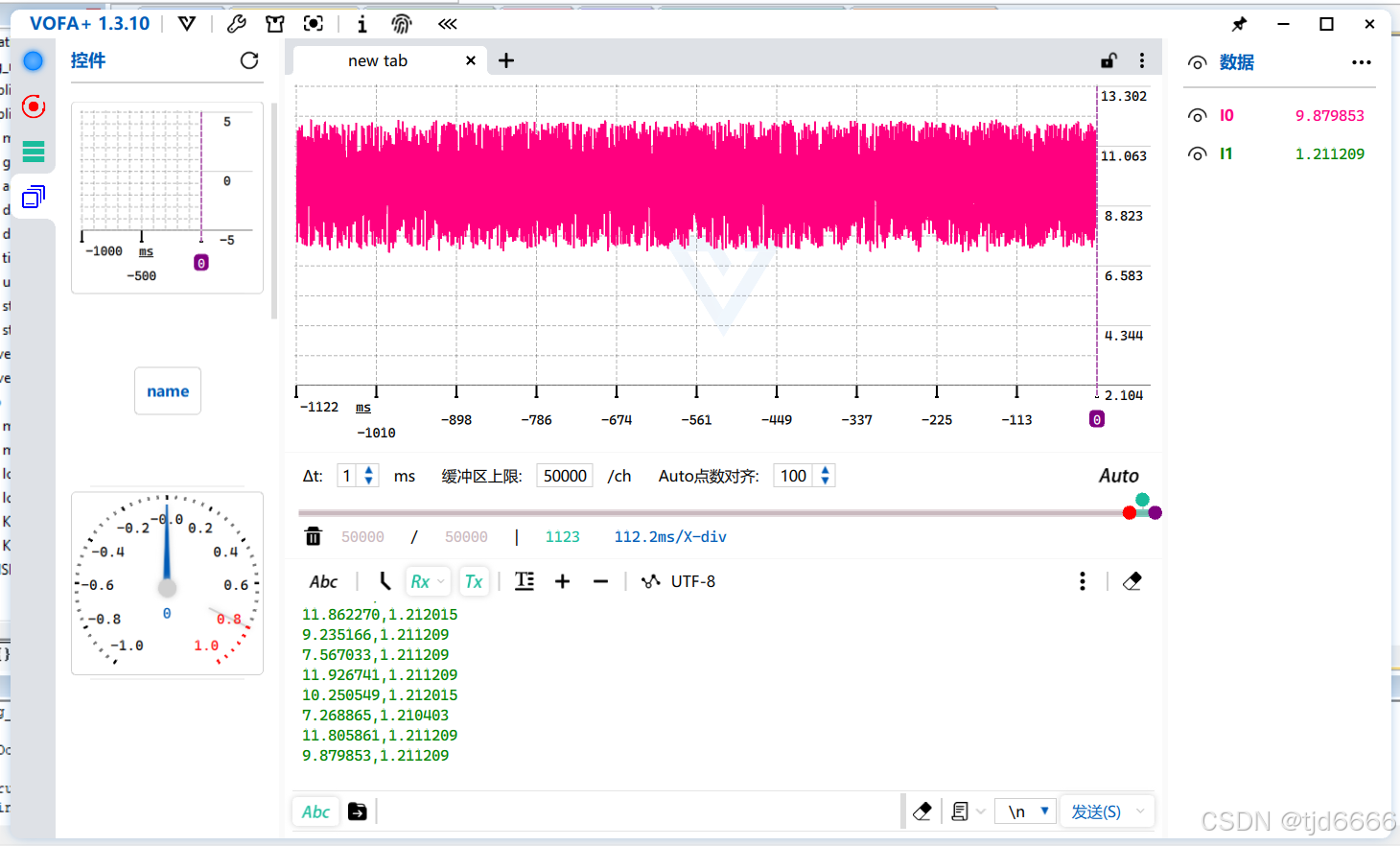
尝试了改变采样周期、采样间隔时间、采样触发方式都未果后,尝试使用滤波。使用VOFA上位机查看滤波前的波形。粉色是电流值,高频噪声很大。内部电压基准值基本稳定。
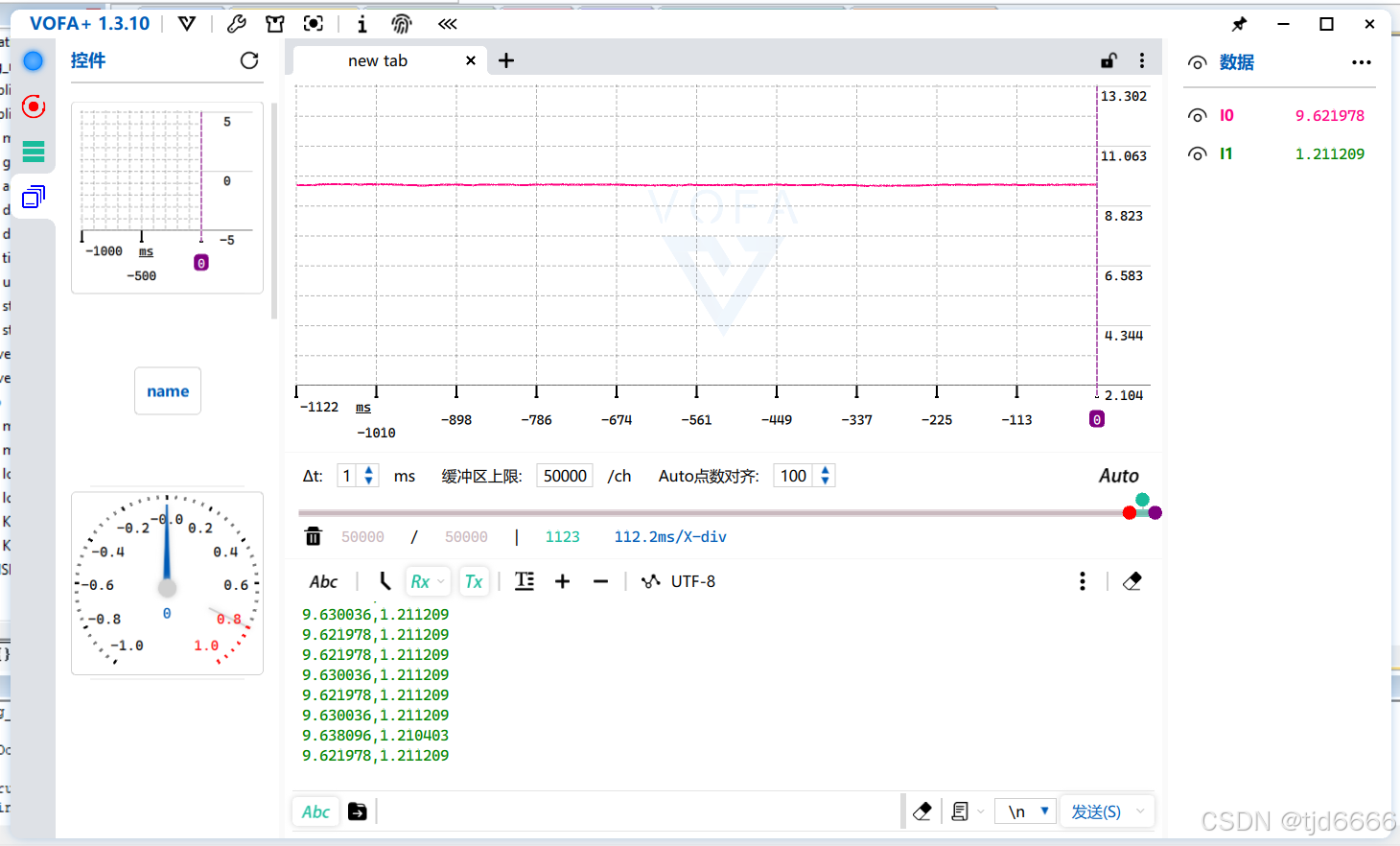
使用了卡尔曼滤波+平滑均值滤波,之所以选择平滑均值滤波是为了在处理第一次的滤波时尽可能减少对下一次采样的影响,确保采样周期的稳定。滤波效果如下:
使用的是4-20mA信号发生器,设置为9.6mA输出:
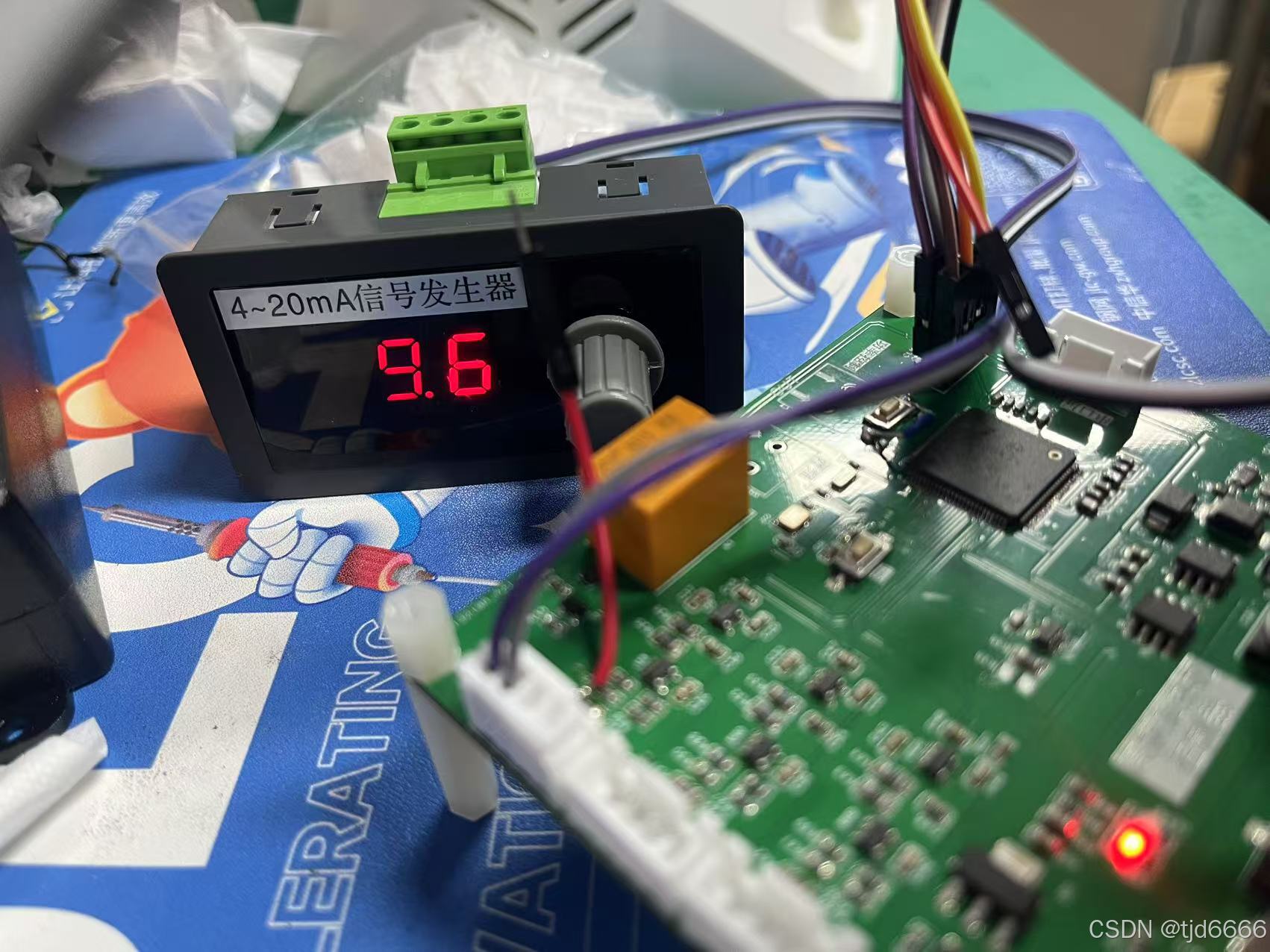
万用表实测电流为9.61mA:
 因此误差基本在0.01-0.02mA左右,能满足使用需求。
因此误差基本在0.01-0.02mA左右,能满足使用需求。
五、相关代码
Kalman.c
#include "Kalman.h"
Kalman kfp,kfp1;
void Kalman_Init()
{
kfp.Last_P = 1;
kfp.Now_P = 0;
kfp.out = 0;
kfp.Kg = 0;
kfp.Q = 0.0015;//小往大
kfp.R = 0.003;//大往小
kfp1.Last_P = 1;
kfp1.Now_P = 0;
kfp1.out = 0;
kfp1.Kg = 0;
kfp1.Q = 0.0015;//小往大
kfp1.R = 0.003;//大往小
}
/**
*卡尔曼滤波器
*@param Kalman *kfp 卡尔曼结构体参数
* float input 需要滤波的参数的测量值(即传感器的采集值)
*@return 滤波后的参数(最优值)
*/
float KalmanFilter_new(Kalman *kfp,float input)
{
//预测协方差方程:k时刻系统估算协方差 = k-1时刻的系统协方差 + 过程噪声协方差
kfp->Now_P = kfp->Last_P + kfp->Q;
//卡尔曼增益方程:卡尔曼增益 = k时刻系统估算协方差 / (k时刻系统估算协方差 + 观测噪声协方差)
kfp->Kg = kfp->Now_P / (kfp->Now_P + kfp->R);
//更新最优值方程:k时刻状态变量的最优值 = 状态变量的预测值 + 卡尔曼增益 * (测量值 - 状态变量的预测值)
kfp->out = kfp->out + kfp->Kg * (input -kfp->out);//因为这一次的预测值就是上一次的输出值
//更新协方差方程: 本次的系统协方差付给 kfp->LastP 威下一次运算准备。
kfp->Last_P = (1-kfp->Kg) * kfp->Now_P;
return kfp->out;
}
float KalmanFilter_new1(Kalman *kfp1,float input)
{
//预测协方差方程:k时刻系统估算协方差 = k-1时刻的系统协方差 + 过程噪声协方差
kfp1->Now_P = kfp1->Last_P + kfp1->Q;
//卡尔曼增益方程:卡尔曼增益 = k时刻系统估算协方差 / (k时刻系统估算协方差 + 观测噪声协方差)
kfp1->Kg = kfp1->Now_P / (kfp1->Now_P + kfp1->R);
//更新最优值方程:k时刻状态变量的最优值 = 状态变量的预测值 + 卡尔曼增益 * (测量值 - 状态变量的预测值)
kfp1->out = kfp1->out + kfp1->Kg * (input -kfp1->out);//因为这一次的预测值就是上一次的输出值
//更新协方差方程: 本次的系统协方差付给 kfp->LastP 威下一次运算准备。
kfp1->Last_P = (1-kfp1->Kg) * kfp1->Now_P;
return kfp1->out;
}
Kalman.h
#ifndef Kalman_H
#define Kalman_H
#include "main.h"
typedef struct
{
float Last_P;//上次估算协方差 不可以为0 ! ! ! ! !
float Now_P;//当前估算协方差
float out;//卡尔曼滤波器输出
float Kg;//卡尔曼增益
float Q;//过程噪声协方差
float R;//观测噪声协方差
}Kalman;
void Kalman_Init(void);
float KalmanFilter_new(Kalman *kfp,float input);
float KalmanFilter_new1(Kalman *kfp1,float input);
extern Kalman kfp,kfp1;
#endif
平滑均值滤波+ADC处理:
//平滑均值滤波
#define N 100
int value_buf[N];
int sum=0;
int curNum=0;
int moveAverageFilter()
{
if(curNum < N)
{
value_buf[curNum] = adc_result[0];
sum += value_buf[curNum];
curNum++;
return sum/curNum;
}
else
{
sum -= sum/N;
sum += adc_result[0];
return sum/N;
}
}
void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef *hadc)
{
adc_result[0] = KalmanFilter_new(&kfp,adc_result[0]);
adc_result_temp1 = (float)(moveAverageFilter()*3.3/4095);
Vref = (float)(adc_result[3]*3.3/4095);
I_1_ADC = (adc_result_temp1*1000)/100.0;//mA
HAL_ADC_Start_DMA(&hadc1,(uint32_t*)adc_result,4);
}相关初始化:
Kalman_Init();
HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED);
HAL_ADC_Start_DMA(&hadc1,(uint32_t*)adc_result,4);

















 9943
9943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









