







目录

0 引言
随着游戏场景中的模型数量越来越多,模型精度越来越高(三角面数越来越多),会发现场景的运行速度逐渐减慢。这时就需要进行场景的优化操作。
1 LOD
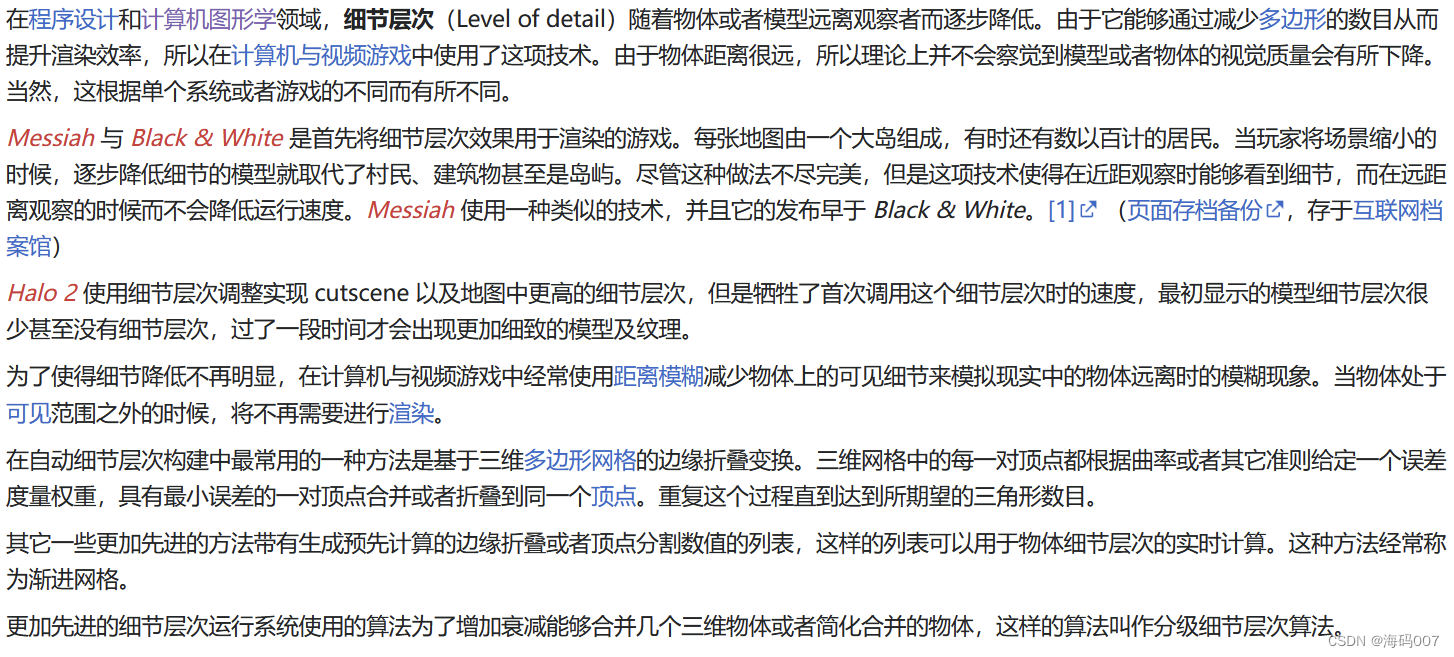
1.1 LOD定义
以下内容摘自维基百科:
1.2 UE5中的LOD技术
在UE4中,显示在场景中的物体可以分为两大类别:骨骼网格体和静态网格体。
- 骨骼网格体组件:它内部包含一具骨架(用于连接骨骼);骨架负责移动骨骼网格体的各个顶点,以便匹配当前播放的动画。因此,骨骼网格体组件适用于表现人物、生物、复杂机械或任何具备复杂运动的对象。
- 静态网格体组件:它是由多个静态多边形构成的几何体,是虚幻引擎的基本场景构建单位。除了用于构建场景,静态网格体组件还能用于创建运动对象(如门或电梯)、刚体物理对象、植物和地形装饰物、程序化创建的建筑、游戏目标和许多其它的视觉元素。
骨骼网格体和静态网格体都可以设置LOD层级
设置的方法:
- 设置骨骼网格体LOD
打开UE5人物的骨骼网格体界面,在【资产详情】中可以看到【LOD选择器】面板,我们可以选择4级LOD模型,也可以把自定义勾选,然后自己设置模型有几级LOD。


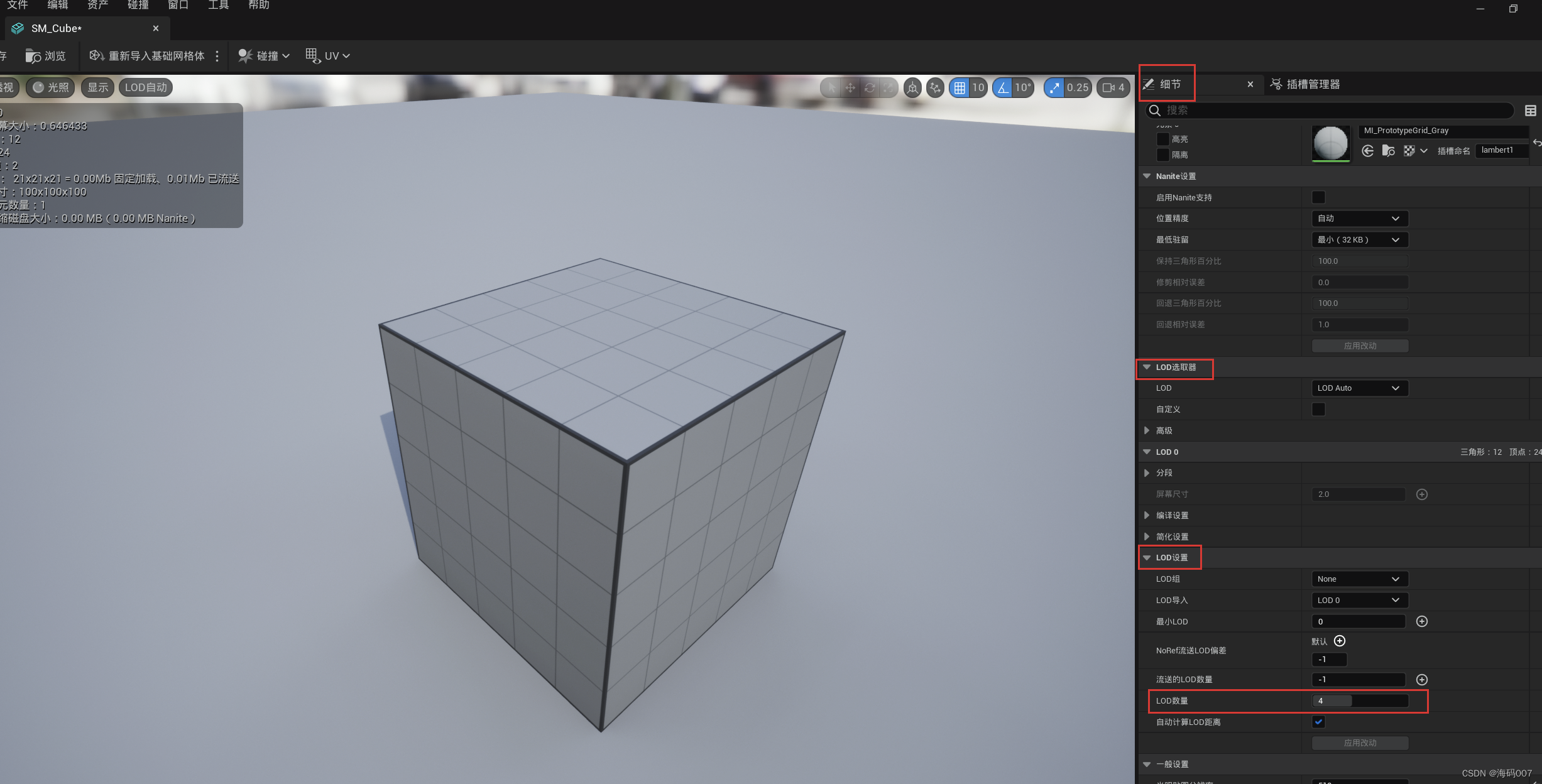
- 设置静态网格体LOD
静态网格体LOD设置与骨骼网格体类似,是在【细节】-【LOD选取器】中进行设置。在【细节】【LOD设置】的LOD数量属性中可以设置模型有几级LOD。
1.3 HLOD(Hierarchical Level of Detail)
虚幻引擎中的一个复杂关卡可以包含上百个细节丰富的静态网格体资产。对于这种程度的细节,一次加载方圆数公里的关卡会非常缓慢。
当模型处于远距离时,分层细节级别(HLOD)系统可以将多个静态网格体Actor合并成单个代理网格体和材质。这能减少场景中需要渲染的Actor数量,从而减少每帧的绘制调用数量,并提高性能。这在处理大型开放世界时特别有用。
构建HLOD网格体的具体步骤看:UE官方文档。
2 Nanite
2.1 UE5的Nanite技术
UE5 采用了两大核心技术,其中之一就是“Nanite”,这是一个允许将高细节摄影源材料导入游戏的先进技术,Nanite 的出现让 Epic 能够利用其收购最大的摄影测量库 Quixel。
UE5的目标是让开发者轻松的建立有细节的游戏世界而无须花费更多时间在开发精细的资产上。Nanite 可以导入任何三维计算机绘图软件做出的 3D模型和3D场景,像是Zbrush、Blender,从而让开发者使用高面数的模型与高清晰度的贴图,并且无须担心存储器的限制。
最后的话
最近很多小伙伴找我要Linux学习资料,于是我翻箱倒柜,整理了一些优质资源,涵盖视频、电子书、PPT等共享给大家!
资料预览
给大家整理的视频资料:
给大家整理的电子书资料:
如果本文对你有帮助,欢迎点赞、收藏、转发给朋友,让我有持续创作的动力!
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
升。**
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 831
831











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









