







最后
Python崛起并且风靡,因为优点多、应用领域广、被大牛们认可。学习 Python 门槛很低,但它的晋级路线很多,通过它你能进入机器学习、数据挖掘、大数据,CS等更加高级的领域。Python可以做网络应用,可以做科学计算,数据分析,可以做网络爬虫,可以做机器学习、自然语言处理、可以写游戏、可以做桌面应用…Python可以做的很多,你需要学好基础,再选择明确的方向。这里给大家分享一份全套的 Python 学习资料,给那些想学习 Python 的小伙伴们一点帮助!
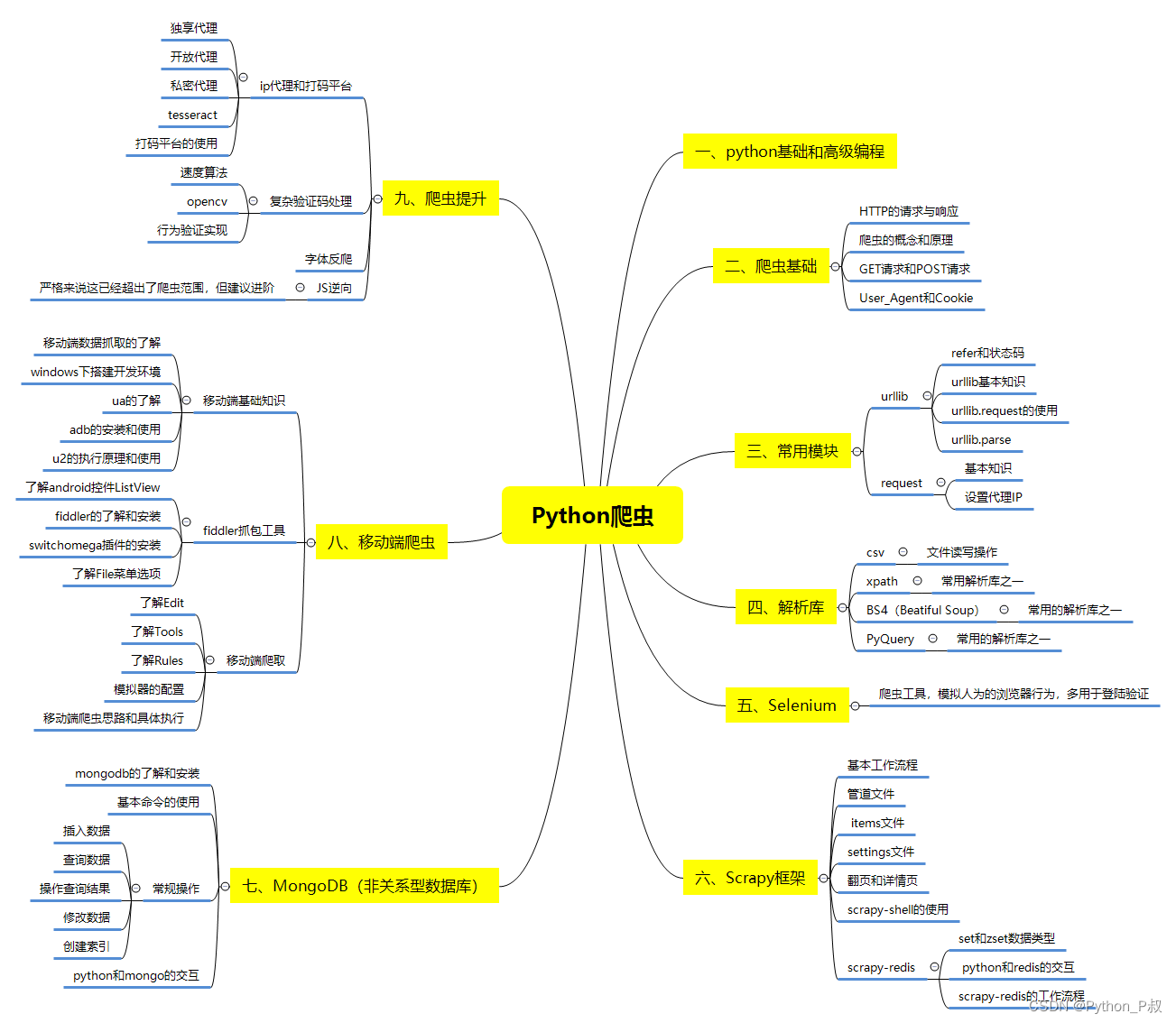
👉Python所有方向的学习路线👈
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
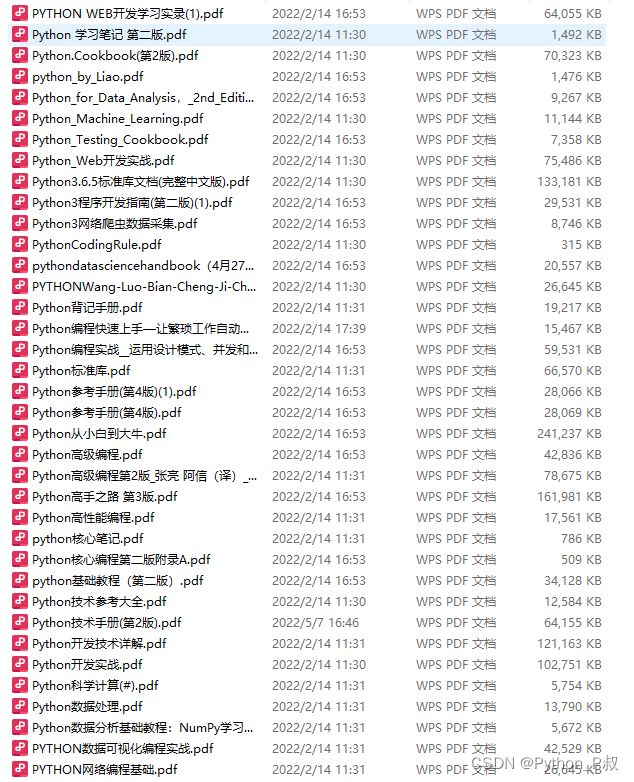
👉Python必备开发工具👈
工欲善其事必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

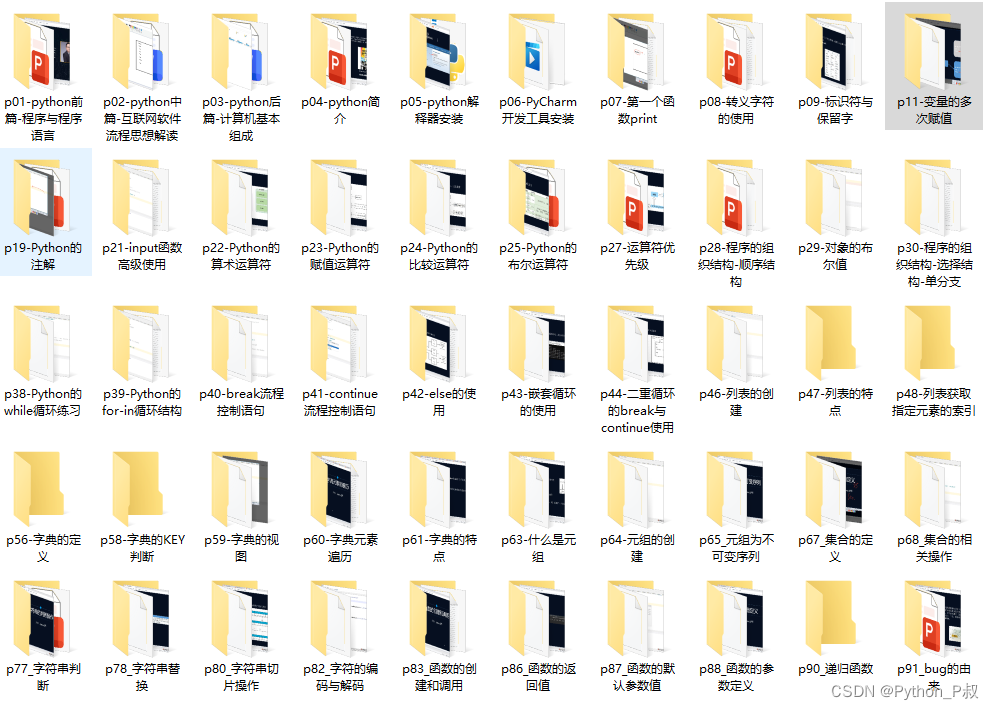
👉Python全套学习视频👈
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
👉实战案例👈
学python就与学数学一样,是不能只看书不做题的,直接看步骤和答案会让人误以为自己全都掌握了,但是碰到生题的时候还是会一筹莫展。
因此在学习python的过程中一定要记得多动手写代码,教程只需要看一两遍即可。
👉大厂面试真题👈
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
透视变换
result = cv2.warpPerspective(image2, M, (image1.shape[1]+image2.shape[1], image2.shape[0]))
result[0:image1.shape[0], 0:image1.shape[1]] = image1
显示拼接结果
cv2.imshow(‘Image Stitching’, result)
cv2.waitKey(0)
cv2.destroyAllWindows()
请注意,这只是一个简单的示例代码,并不考虑一些复杂的情况,如图像的旋转、缩放和畸变等。在实际应用中,可能需要更加复杂的算法和技术来处理这些情况。此外,还可以使用其他图像拼接库或工具来实现更高级的图像拼接功能。
### 三、图像配准任务:图像校正介绍和示例代码
图像校正是图像配准任务的一种应用,它旨在将图像中的对象或场景几何校正,以消除图像的畸变或变形。常见的图像校正任务包括相机畸变校正、透视畸变校正等。
在OpenCV中,可以使用以下步骤进行图像校正:
1. 加载图像:使用OpenCV的`cv2.imread()`函数加载待校正的图像。
2. 计算变换矩阵:根据校正的目标,选择相应的方法计算图像的变换矩阵。例如,对于相机畸变校正,可以使用相机标定技术来估计相机的畸变参数和内外参数;对于透视畸变校正,可以使用特征点检测和匹配算法来计算透视变换矩阵。
3. 应用变换矩阵:使用计算得到的变换矩阵,对待校正的图像进行几何变换,实现图像的校正。例如,对于相机畸变校正,可以使用`cv2.undistort()`函数;对于透视畸变校正,可以使用`cv2.warpPerspective()`函数。
下面是一个简单的示例代码,演示了如何使用OpenCV进行相机畸变校正:
import cv2
import numpy as np
加载相机标定数据
camera_matrix = np.load(‘camera_matrix.npy’)
dist_coeffs = np.load(‘dist_coeffs.npy’)
加载待校正的图像
image = cv2.imread(‘image.jpg’)
相机畸变校正
undistorted_image = cv2.undistort(image, camera_matrix, dist_coeffs)
显示校正结果
cv2.imshow(‘Image Correction’, undistorted_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
请注意,上述示例代码中的相机标定数据需要通过相机标定技术事先获取,包括相机矩阵(camera\_matrix)和畸变系数(dist\_coeffs)。对于相机标定的具体步骤和算法,可以参考OpenCV官方文档或其他相关资料。
此外,对于透视畸变校正等其他类型的图像校正任务,可能需要使用不同的方法和技术。具体的实现方式取决于校正的目标和需求。
### 四、图像配准任务:图像配准介绍和示例代码
图像配准是将多幅图像进行对齐和叠加的任务,以实现图像的融合或比较。常见的图像配准任务包括图像拼接、图像校正、图像配准等。
在OpenCV中,可以使用以下步骤进行图像配准:
1. 加载图像:使用OpenCV的`cv2.imread()`函数加载待配准的图像。
2. 寻找特征点:对于每幅图像使用特征点检测算法(如SIFT、SURF或ORB)找到关键点和描述子。
3. 特征匹配:使用特征匹配算法(如FLANN或BFMatcher)对关键点进行匹配,找到图像之间的对应关系。
4. 计算变换矩阵:根据匹配的特征点,使用RANSAC或其他方法计算图像之间的变换矩阵,如单应性矩阵(Homography)。
5. 透视变换:根据计算得到的变换矩阵,对待配准的图像进行透视变换,将其对齐到参考图像上。
6. 图像融合:将对齐后的图像与参考图像进行融合,消除重叠区域,得到最终的配准结果。
下面是一个简单的示例代码,演示了如何使用OpenCV进行图像配准:
import cv2
import numpy as np
加载图像
image1 = cv2.imread(‘image1.jpg’)
image2 = cv2.imread(‘image2.jpg’)
寻找特征点
sift = cv2.SIFT_create()
keypoints1, descriptors1 = sift.detectAndCompute(image1, None)
keypoints2, descriptors2 = sift.detectAndCompute(image2, None)
特征匹配
matcher = cv2.BFMatcher()
matches = matcher.knnMatch(descriptors1, descriptors2, k=2)
筛选匹配点
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
计算变换矩阵
src_pts = np.float32([keypoints1[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)
dst_pts = np.float32([keypoints2[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
透视变换
result = cv2.warpPerspective(image2, M, (image1.shape[1]+image2.shape[1], image2.shape[0]))
result[0:image1.shape[0], 0:image1.shape[1]] = image1
显示配准结果
cv2.imshow(‘Image Registration’, result)
cv2.waitKey(0)
cv2.destroyAllWindows()
请注意,这只是一个简单的示例代码,并不考虑一些复杂的情况,如图像的旋转、缩放和畸变等。在实际应用中,可能需要更加复杂的算法和技术来处理这些情况。此外,还可以使用其他图像配准库或工具来实现更高级的图像配准功能。
### 五、基于特征点的配准方法介绍和示例代码
基于特征点的配准方法是图像配准中常用的一种方法,它通过检测图像中的特征点并匹配这些特征点,从而计算出图像之间的变换关系,实现图像的对齐和配准。
以下是基于特征点的配准方法的一般步骤:
1. 特征点检测:使用特征点检测算法(如SIFT、SURF或ORB)在待配准的图像中提取特征点。这些特征点可以是图像中的角点、边缘点或其他显著的局部特征。
2. 特征描述子计算:对于每个特征点,计算其对应的特征描述子,用于描述特征点周围的图像信息。常见的特征描述子包括SIFT描述子、SURF描述子或ORB描述子等。
3. 特征匹配:对于两幅图像的特征描述子,使用特征匹配算法(如FLANN或BFMatcher)来进行特征点的匹配。匹配算法会根据特征描述子之间的相似度度量,找到图像之间的对应关系。
4. 变换估计:根据匹配的特征点,使用RANSAC或其他方法来估计图像之间的变换模型,如单应性矩阵(Homography)或仿射变换。变换模型描述了一个图像中的点如何映射到另一个图像中的点。
5. 图像对齐:根据计算得到的变换模型,对待配准的图像进行透视变换,将其对齐到参考图像上。这样可以使两幅图像在空间上对齐,以便后续的叠加或比较。
下面是一个简单的示例代码,演示了基于特征点的配准方法的实现:
import cv2
加载待配准的图像
image1 = cv2.imread(‘image1.jpg’)
image2 = cv2.imread(‘image2.jpg’)
创建SIFT特征检测器
sift = cv2.SIFT_create()
检测特征点并计算描述子
keypoints1, descriptors1 = sift.detectAndCompute(image1, None)
keypoints2, descriptors2 = sift.detectAndCompute(image2, None)
创建FLANN匹配器
matcher = cv2.FlannBasedMatcher()
matches = matcher.knnMatch(descriptors1, descriptors2, k=2)
筛选匹配点
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
提取匹配点的坐标
src_pts = [keypoints1[m.queryIdx].pt for m in good_matches]
dst_pts = [keypoints2[m.trainIdx].pt for m in good_matches]
计算变换矩阵(单应性矩阵)
M, mask = cv2.findHomography(np.float32(src_pts), np.float32(dst_pts), cv2.RANSAC, 5.0)
对待配准图像进行透视变换
result = cv2.warpPerspective(image2, M, (image1.shape[1]+image2.shape[1], image2.shape[0]))
result[0:image1.shape[0], 0:image1.shape[1]] = image1
显示配准结果
cv2.imshow(‘Image Alignment’, result)
cv2.waitKey(0)
cv2.destroyAllWindows()
请注意,上述示例代码中使用的是SIFT特征检测器和FLANN匹配器,您也可以根据需要选择其他特征检测器和匹配器。此外,为了获得更好的配准结果,可能需要根据具体情况调整参数、筛选匹配点或使用其他改进的算法。
### 六、基于亮度直方图的配准方法介绍和示例代码
基于亮度直方图的配准方法是一种简单而有效的图像配准,它通过比较图像的亮度直方图来实现图像的对齐。该方法假设图像之间的亮度分布具有一定的相似性,因此可以通过调整图像的位置和尺度来最大程度地匹配它们的亮度分布。
以下是基于亮度直方图的配准方法的一般步骤:
1. 加载图像:使用OpenCV的`cv2.imread()`函数加载待配准的图像。
2. 提取亮度信息:将图像转换为灰度图像,以提取亮度信息。
3. 计算亮度直方图:使用`cv2.calcHist()`函数计算图像的亮度直方图。可以选择不同的直方图参数,如直方图的维度、范围和通道数等。
4. 归一化直方图:将计算得到的亮度直方图归一化,以便进行比较。
5. 比较直方图:使用适当的相似性度量方法(如交叉相关性或巴氏距离)比较图像之间的亮度直方图。根据相似性度量的结果,选择最佳的变换参数。
6. 应用变换:根据选择的变换参数,对待配准的图像进行平移、缩放或旋转等变换,使其与参考图像对齐。
下面是一个简单的示例代码,演示了基于亮度直方图的配准方法的实现:
import cv2
加载待配准的图像
image1 = cv2.imread(‘image1.jpg’)
image2 = cv2.imread(‘image2.jpg’)
转换为灰度图像
gray1 = cv2.cvtColor(image1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(image2, cv2.COLOR_BGR2GRAY)
计算亮度直方图
hist1 = cv2.calcHist([gray1], [0], None, [256], [0, 256])
hist2 = cv2.calcHist([gray2], [0], None, [256], [0, 256])
归一化直方图
hist1 = cv2.normalize(hist1, hist1, 0, 1, cv2.NORM_MINMAX)
hist2 = cv2.normalize(hist2, hist2, 0, 1, cv2.NORM_MINMAX)
比较直方图(使用交叉相关性作为相似性度量)
similarity = cv2.compareHist(hist1, hist2, cv2.HISTCMP_CORREL)
输出相似性度量结果
print("Similarity: ", similarity)
如果相似性度量高于某个阈值,则进行图像配准
if similarity > 0.8:
# 进行图像配准操作
# …
pass
请注意,上述示例代码中使用的相似性度量方法是交叉相关性(cv2.HISTCMP\_CORREL),您也可以根据需要选择其他相似性度量方法。此外,为了获得更好的配准结果,可能需要根据具体情况调整阈值或使用其他改进的算法。
### 七、基于相位相关性的配准方法介绍和示例代码
基于相位相关性的配准方法是一种基于频域的图像配准方法,它利用图像的傅里叶变换和互相关运算来实现图像的对齐。该方法假设图像之间的相位信息具有一定的相似性,通过计算图像之间的相位相关性来确定最佳的配准变换。
以下是基于相位相关性的配准方法的一般步骤:
1. 加载图像:使用OpenCV的`cv2.imread()`函数加载待配准的图像。
2. 转换为灰度图像:将图像转换为灰度图像,以便进行频域变换。
**一、Python所有方向的学习路线**
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照下面的知识点去找对应的学习资源,保证自己学得较为全面。
**二、Python必备开发工具**
工具都帮大家整理好了,安装就可直接上手!
**三、最新Python学习笔记**
当我学到一定基础,有自己的理解能力的时候,会去阅读一些前辈整理的书籍或者手写的笔记资料,这些笔记详细记载了他们对一些技术点的理解,这些理解是比较独到,可以学到不一样的思路。
**四、Python视频合集**
观看全面零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。
**五、实战案例**
纸上得来终觉浅,要学会跟着视频一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。
**六、面试宝典**
###### **简历模板**
**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**[需要这份系统化学习资料的朋友,可以戳这里获取](https://bbs.csdn.net/forums/4304bb5a486d4c3ab8389e65ecb71ac0)**
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**















 871
871











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









