







先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年最新Python全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。



既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上Python知识点,真正体系化!
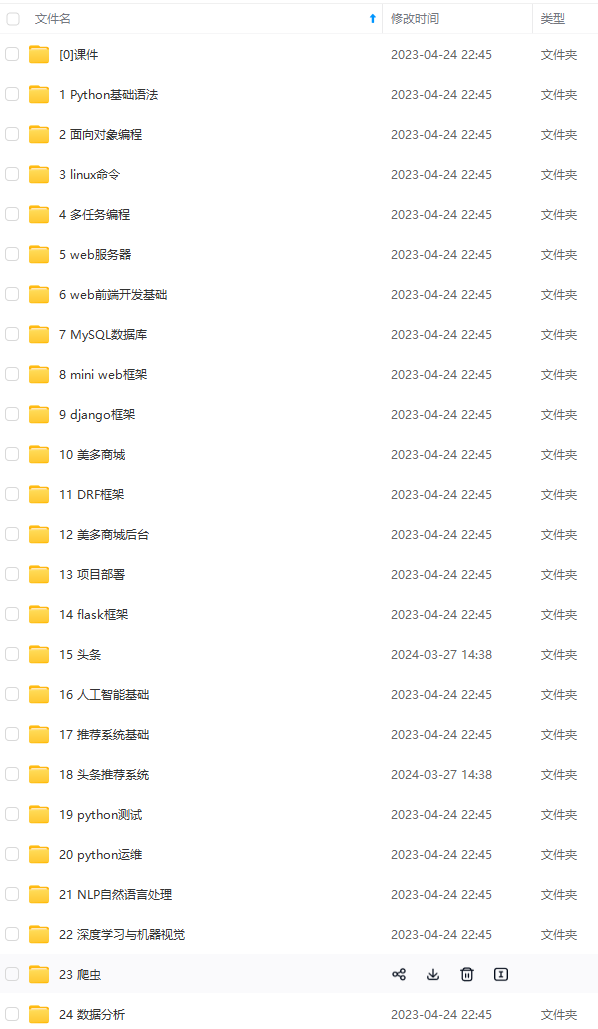
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
如果你需要这些资料,可以添加V获取:vip1024c (备注Python)

正文
1、图片


2、代码
#include <reg52.h> //52芯片配置文件
#include <intrins.h> //包含nop等系统函数
#include “bst_car.h”
unsigned char disbuff[4]={0,0,0,0};//用于分别存放距离的值0.1mm、mm、cm和m的值
unsigned int time=0;//用于存放定时器时间值
unsigned long S=0;//用于存放距离的值
bit flag =0; //量程溢出标志位
char a=0;
//延时函数
void delay(unsigned int xms)
{
unsigned int i,j;
for(i=xms;i>0;i–) //i=xms即延时约xms毫秒
for(j=112;j>0;j–);
}
void Delay10us(unsigned char i) //10us延时函数 启动超声波模块时使用
{
unsigned char j;
do{
j = 10;
do{
nop();
}while(–j);
}while(–i);
}
void StartModule() //启动超声波模块
{
TX=1; //启动一次模块
Delay10us(2);
TX=0;
}
void Forward(void)//前进
{
IN2=1;
IN3=1;
IN1=0;
IN4=0;
}
void Stop(void) //停车
{
IN1=0;
IN2=0;
IN3=0;
IN4=0;
}
void back(void) //后退
{
IN1=1;
IN2=0;
IN3=0;
IN4=1;
}
void Turn_Right(void) //向右旋转
{
IN1=0;
IN2=1;
IN3=0;
IN4=1;
}
/距离计算程序*******/
void conut1(void)
{
time=TH1*256+TL1;
TH1=0;
TL1=0;
//此时time的时间单位决定于晶振的频率,外接晶振为11.0592MHZ
//那么1us声波能走多远的距离呢?1s=1000ms=1000000us
// 340/1000000=0.00034米
//0.00034米/1000=0.34毫米 也就是1us能走0.34毫米
//但是,我们现在计算的是从超声波发射到反射接收的双路程,
//所以我们将计算的结果除以2才是实际的路程
S=time*0.17+10; //此时计算到的结果为毫米,并且是精确到毫米的后两位了,有两个小数点
}
void Conut(void)
{
conut1();
if((S>=5000)||flag==1) //超出测量范围
{
a=0;
flag=0;
}
else
{
disbuff[0]=S%10;
disbuff[1]=S/10%10;
disbuff[2]=S/100%10;
disbuff[3]=S/1000;
}
//避障部分===================================
if(S<=240) 刹车障碍物距离 跟车速有关 可更改
{
a++;
if(a>=2)
{
a=0;
Stop();
back(); //后退缓冲
delay(230);// 后退缓冲时间 跟车速有关 可更改
B:Turn_Right();
delay(50); /// 旋转角度 跟环境复杂程度有关 可更改
Stop();
delay(100); 旋转顿挫时间 视觉效果 可更改
StartModule();
while(RX==0);
TR1=1; //开启计数
while(RX); //当RX为1计数并等待
TR1=0; //关闭计数
conut1();
if(S>340) 可直行方向无障碍物距离 跟环境有关 可更改
{
Turn_Right();
delay(90);
Stop(); //微调前进方向 避免车宽对前进影响
delay(200);
Forward();
}
else
{
goto B; //若没转到空旷方向 回到B点 继续旋转一次
}
}
else
{
Forward(); //无障碍物 直行
}
}
else
{
a=0;
Forward(); //无障碍物 直行
}
//=======================================
一、Python所有方向的学习路线
Python所有方向路线就是把Python常用的技术点做整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
二、学习软件
工欲善其事必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

三、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip1024c (备注python)

一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA56iL5bqP5aqb56eD56eD,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:vip1024c (备注python)
[外链图片转存中…(img-uBgerAA3-1713483765216)]
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!














 6304
6304











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









