







✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🌿 往期回顾可以关注主页,点击搜索
⛄ 内容介绍
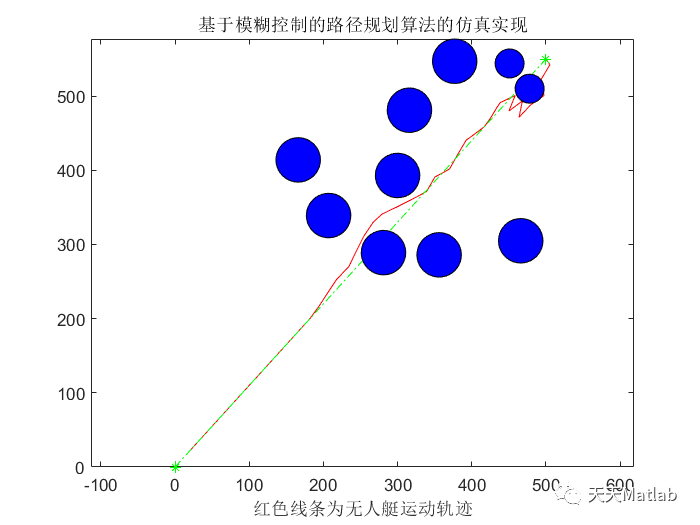
基于模糊控制的路径规划算法是一种利用模糊逻辑和模糊规则来设计无人机或其他机器人的路径规划方法。以下是一个基本的框架:
-
问题定义:明确路径规划问题的目标和约束条件。例如,确定起始位置和目标位置,考虑避障要求、动态环境等。
-
环境感知:通过传感器获取环境信息,并将其转化为可理解的数据形式。这可能涉及到使用视觉传感器、激光雷达、超声波等设备。
-
建立模糊规则库:根据问题定义和感知信息,设计一组模糊规则,将输入变量(如距离、障碍物密度等)映射到输出变量(如移动方向、速度等)。
-
模糊推理:根据当前的环境感知信息和模糊规则库,进行模糊推理,以确定机器人在当前情况下应采取的行动。这可以通过模糊逻辑运算和规则匹配来实现。
-
解模糊化:将模糊推理得到的模糊结果转化为具体的机器人行动指令。这可以通过模糊集合的解模糊化方法,例如最大值、加权平均等来实现。
-
路径跟踪与更新:根据解模糊化的结果,机器人按指令进行移动,并进行路径跟踪。在移动过程中,持续感知环境,更新感知信息并重新进行模糊推理和解模糊化,以动态调整路径规划。
需要注意的是,基于模糊控制的路径规划算法可以适应不确定性和复杂环境,但在实际应用中可能需要对规则库进行精心设计和参数调整,以获得更好的性能和鲁棒性。
⛄ 部分代码
function [NewLineK, NewLineB, NewLineF]=GetNewLineKBF(DectLineK, DectLineF, Angel)%由一定点为基点或左或右旋转直线 Angel 弧度,得出形如y=kx+b的直线的参数% f为k的状态标志 0正常 1竖直 2水平global ProbotX;global ProbotY;if 2==DectLineFNewLineK=tan(Angel);elseif 1==DectLineFNewLineK=tan(pi/2+Angel);elseNewLineK=tan(atan(DectLineK)+Angel);endif isinf(NewLineK) %竖直线NewLineF =1;NewLineB=ProbotX;NewLineK=ProbotX;elseif 0==NewLineK %水平NewLineF =2;NewLineB=ProbotY;NewLineK=ProbotY;elseNewLineF =0;NewLineB=ProbotY - ProbotX*NewLineK;end
⛄ 运行结果
⛄ 参考文献
[1] 任伟建王飞吕微.分层模糊控制的移动机器人路径规划[J].科学技术与工程, 2010, 010(010):2317-2321.
[2] 祝毅鸣,刘莹.基于改进交叉熵算法的随机需求车辆路径设计方法[J].计算机测量与控制, 2014, 22(11):4.DOI:10.3969/j.issn.1671-4598.2014.11.083.
[3] 王茜.基于模糊控制的移动机器人路径规划仿真研究[J].江西煤炭科技, 2021.DOI:10.3969/j.issn.1006-2572.2021.04.061.
[4] 斯日古楞,李海滨,包长春.基于模糊控制的移动机器人路径规划研究[C]//中国力学学会北方七省市区第十三届学术大会.0[2023-07-03].


















 1233
1233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











